My oil-powered helicopter weighs 50kg, how do I set the fixed speed in the flight control?It is not very stable to fly without setting the fixed speed.
First of all, please don’t double-post.
Second, if your helicopter isn’t stable without constant speed you have a bigger tuning problem and just setting constant speed won’t fix it. [Edit] me stupid, me missunderstood the assignment.
Third, you’ve been asked to upload a .bin flight log file before. This gives us a lot of information and is the easiest way for anyone to help you. Please don’t make helping you harder than necessary.
I apologize for the unstable network connection; I thought my post hadn’t gone through. I’ve progressed through the basic debugging steps to the point where unlocking is feasible. However, there’s one remaining issue with setting the helicopter’s constant speed. Should I first allow the aircraft to take off and then set the constant speed, or should I configure the constant speed before conducting a test flight? Is the constant speed input required in the advanced parameters section? I’m relatively new to using posts to seek assistance, and I’m unsure how to send you a file with the .bin extension.
Is the first 5 rows set to a fixed speed?
I set H_RSC_MODE=4. Does the flight control need an external rotor speed sensor?
A .bin file is the flight log file that ArduPilot writes during flight. If you haven’t flown yet you don’t have this file. I assumed you had flown already cause you said it’s unstable.
Yes, with H_RSC_MODE = 4 you need an external rotor RPM sensor.
I wouldn’t be so sure about this. Having large rpm variations heavily affects rotor response to control inputs.
@zhangduangduang Have you already flown helicopters or are you totally new? The idea is to configure the throttle curve (H_RSC_MODE 3 ) such that your main rotor rpm are as stable and close to your setpoint as possible. Only after this you can switch to H_RSC_MODE 4 to use the speed governing feature.
Of course, main rotor rpm needs to be at the selected setpoint before take off.
1 Like
It’s not the first time I’ve taken off yet. I used a gyroscope to understand it before. Is this speed sensor connected to the flight control or the engine?
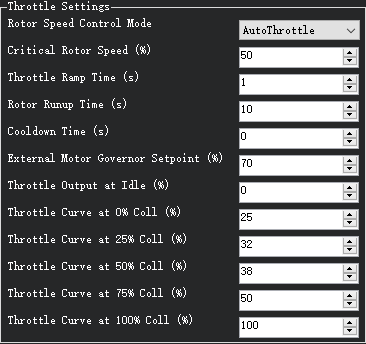
I am relatively new to oil-powered helicopters. I have never installed a flight control on a helicopter. For my first debugging, I read the steps on the official website, but it is still a bit difficult to understand the step of setting the throttle. My helicopter uses a piston engine. You What should be set for parameter H_RSC_MODE 3? Throttle Output at Idle (%)=0
Throttle Curve at 0% Coll (%)=25
Throttle Curve at 25% Coll (%)=32
Throttle Curve at 50% Coll (%)=38
Throttle Curve at 75% Coll (%)=50
Throttle Curve at 100% Coll (%)=100, I have not changed the default value here
I directly set the H_RSC_MODE to 4. Are my steps wrong?
Hi @zhangduangduang ,
first connect and setup an RPM sensor to the autopilot, set H_RSC_MODE to 3 (pure throttle curve mode).You want the RPM sensor to measure main rotor RPM.
If you are not sure about the overall tuning of your aircraft it is better to tie it to the ground and perform collective sweeps to adjust throttle curve points so that measured rpm (RPM1) stays within 10% of your target rpm (the closer the better-over the whole collective range).
Then switch H_RSC_MODE to 4 and perform the test again to check proper governor operation and tuning. Once governor is correctly tuned you will see RPM staying within 1-2% of your target rpm.
Hello, may I ask where I can buy an RPM sensor? There is no sensor in China that can connect to flight control, only a speed sensor connected to the engine. Is there a picture provided, or is there a store website? Thank you.
What engine model do you have? possibly provide pictures of magnetic pick-up on the cranckshaft and ignition unit.
I use this sensors: GRAUPNER MAGNETIC HOTT SPEED SENSOR - buy now - at

Hello, the shopping link you sent. Is this sensor connected to the M1-M14 output port of the flight control? Or is it connected to the receiver?
Thank you very much. Is this sensor interface connected to any M9-M14 socket? What parameters do I need to set to enable this sensor after connecting it? Or directly plug it in and use it?
- Connect the sensor to one of the free pwm on your servo rail.
- Set the corresponding SERVOx_FUNCTION to -1
- Go here and find your specific board hwdef.dat file. In that file look for the GPIO number relative to your selected servo port
- Set RPM1_TYPE to 1 and RPM1_PIN to the previously found GPIO pin, reboot the fc
- eventually edit RPM1_SCALING to match the measured rpm with the true rpm
OKay,thank you.I’ll give it a try then
1 Like
Isn’t that the RPM sensor? Where is it plugged in to at the other end?

Another One:
Check this post for RPM wiring:
Hello, my sensor is plugged into the engine. Can this one also be directly connected to the flight control M1-M14 output port?