Hello, the shopping link you sent. Is this sensor connected to the M1-M14 output port of the flight control? Or is it connected to the receiver?
Thank you very much. Is this sensor interface connected to any M9-M14 socket? What parameters do I need to set to enable this sensor after connecting it? Or directly plug it in and use it?
- Connect the sensor to one of the free pwm on your servo rail.
- Set the corresponding SERVOx_FUNCTION to -1
- Go here and find your specific board hwdef.dat file. In that file look for the GPIO number relative to your selected servo port
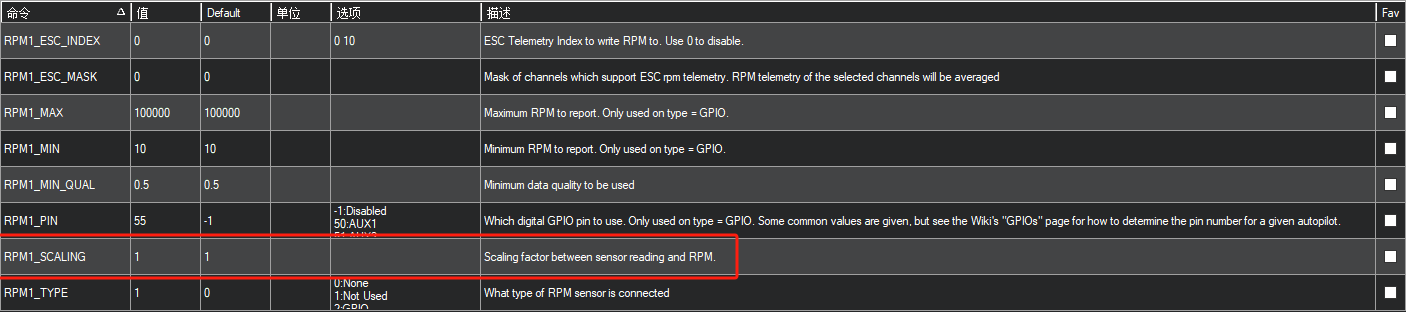
- Set RPM1_TYPE to 1 and RPM1_PIN to the previously found GPIO pin, reboot the fc
- eventually edit RPM1_SCALING to match the measured rpm with the true rpm
OKay,thank you.I’ll give it a try then
1 Like
Isn’t that the RPM sensor? Where is it plugged in to at the other end?

Another One:
Check this post for RPM wiring:
Hello, my sensor is plugged into the engine. Can this one also be directly connected to the flight control M1-M14 output port?
Sorry, it should be the plug connected to the igniter
Hello, I have reached the final step. Does this speed sensor need to be calibrated like an electric helicopter? The electric one needs to be calibrated. How do I calibrate the speed sensor? How to set the last parameter RPM1-SCALING? Can I call up RPM1 from the page to display the speed
Look at the RPM1_TYPE value. It needs to be “2”.
Hi @zhangduangduang , the scaling factor ( I suppose what you mean by calibration) for hall sensors is equal to 1/ number of magnets you have on the flywheel.
Yes, you guessed it right. Using translation software may not be very standard, so is the RPM1-SCALING parameter set to 1 by default? Is the calibration method of the sensor the same as that of the electric ESC?
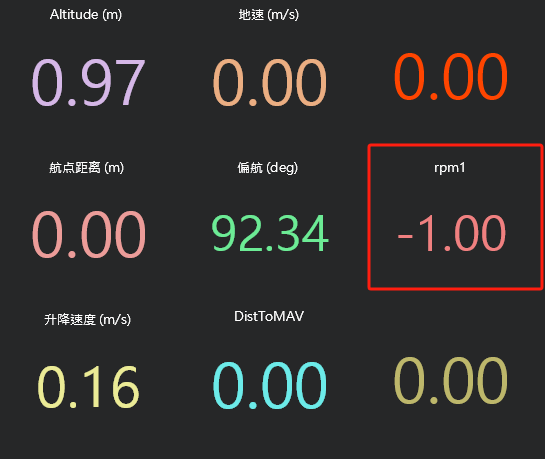
I set the parameters according to your method, but when I turn the rotor head, the rpm1=-1 value displayed by the ground station does not change.
ok,How does the sensor determine that my flight controller has read it? It still displays -1.
@zhangduangduang can you post your param file, autopilot type and where you connected your rpm sensor.
Hello, I use this cloud disk. Can you check it?
Hi @zhangduangduang , the link you provided works ![]() .
.
So, first, on the flight control servo rail move your rpm connector from M6 to M9:
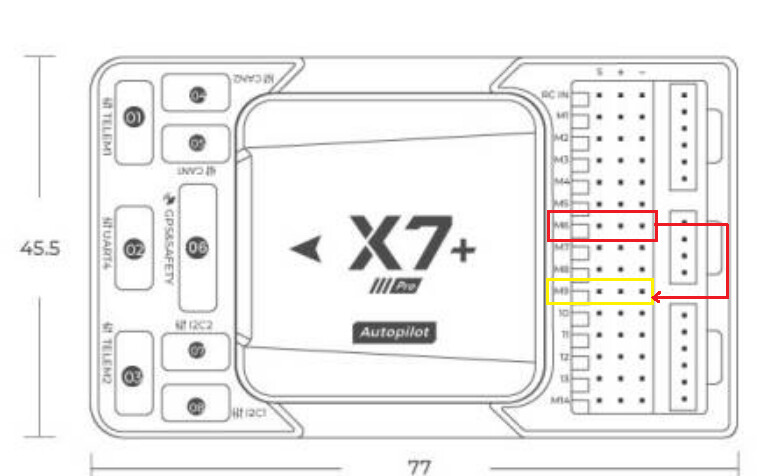
then change RPM1_PIN to 58.
You should be good to go then.
Hello, I tried to change the port today and tried to start the engine, but my engine couldn’t start. The gasoline had already been sucked in and the throttle was also given. The rpm on the ground station was still -1. Did I miss some parameters that were not set, resulting in ignition failure?
no, ignition has nothing to do with the autopilot. In your RPM Y-cable, did you just connect Signal and Ground to the autopilot ? Positive coming from engine RPM sensor must not be connected.
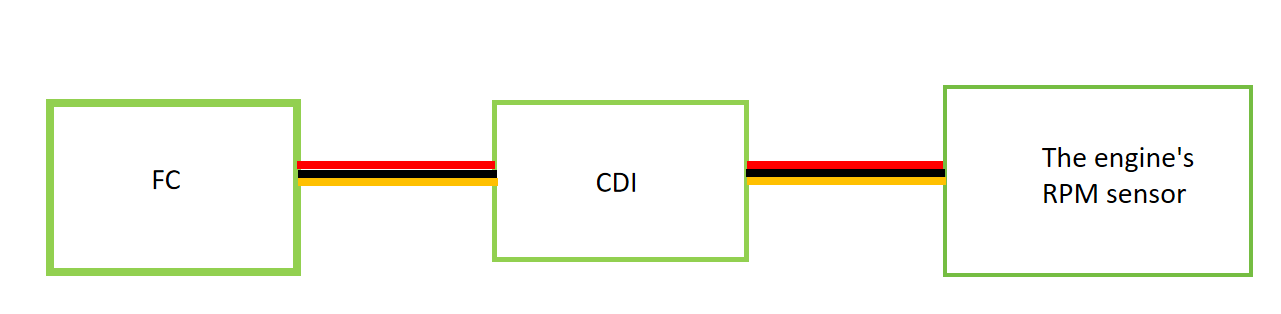
The positive and negative signal lines are connected, and the sensor is built with the engine, is my connection wrong?
only signal and ground should be connected to the FC