@andyp1per Thanks for help. Now I got rootcause. Manufacture use one pinio as DC2DC 9V output switch, which I don’t know. Now turn on the swith 9V DC powered VTX, and then it works.
Wel, in my case,l it seems that IRC Tramp can get something from serial, which might suggest root cause. So is there any way to tell these different cases?
FC VTX port initilization error, which might be serial port open failed // might be hardware configuration issue, contact manufacture.
No data coming back from VTX port // connection or port configuration issue
Feedback corrupted from VTX port // connection/configuration issue or VTX is NOT powered on.
Based on these cases [open failed]/[no data feedback]/[corrupted data feedback], is it possible to make a checklist for user to check?
On speedybeef4v3 I am going to test it (Ruibet vtx).
I enabled AP_TRAMP (define) in hwdef and I got a built bin file that seems to stay into 1 mbyte flash size (hex is 2.7 mbyte like stock firmware).
Have You idea if enabling tramp on 1 mbyte fc would cause troubles ?
I had a look at the code and tramp is enabled only for 2 mbyte boards.
Side effect of this question:
Is there a way to control by gui local on pc compilation options ?
The custom online build service does not show all available options.
Example:
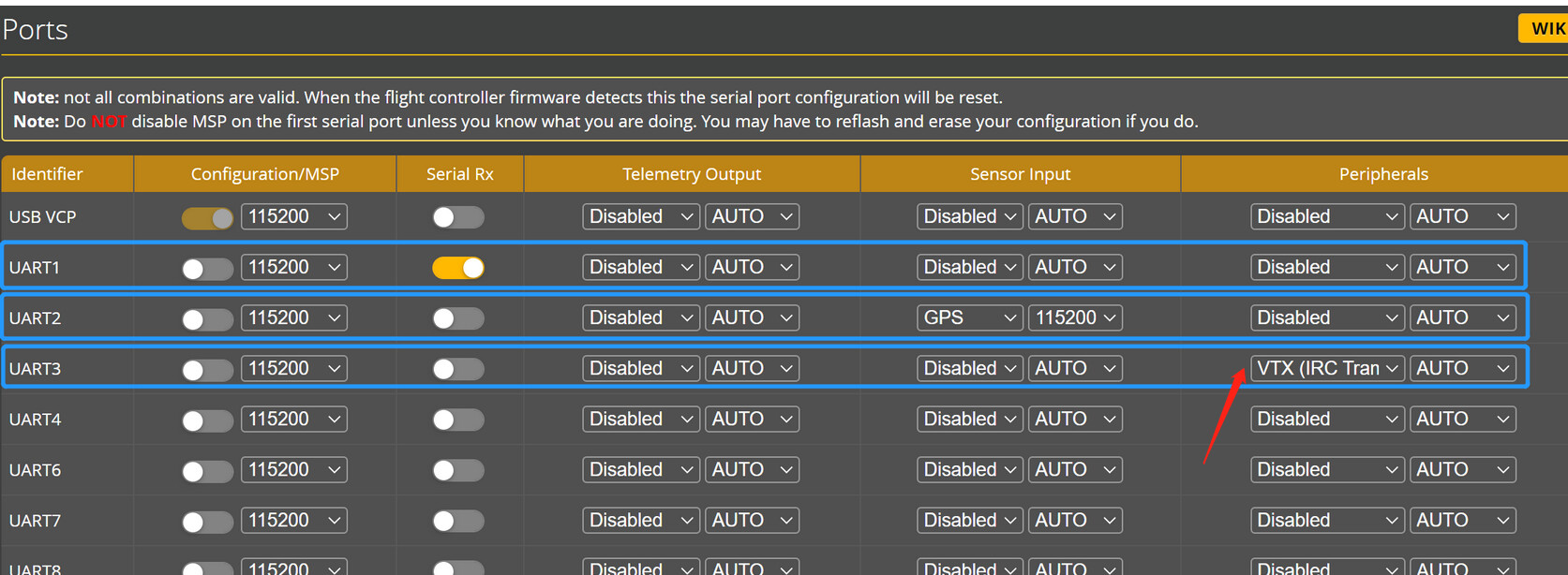
I needed mav link on uart1 because my usb fc connector is broken, so I had to compile on my pc after canceling in hwdef default conf for uart1 for vtx. I moved vtx to uart3. Online build service does not propose hwdef default param modifications (I did not find a way).
I tested Tramp on UART3, using same options (44/halfduplex) but
it does not work…nothing happens, power and channels are always the same (set by switch pushbutton on vtx).
Ruibet vtx goes up to 1.6 watt, so max should be 1600, not 1000.
Anyway it does work partiallly also on Inav 6.1.1, with power level 3 and 4, other levels do not work.
I wonder if serial speeds matters, it is 38400 by default on ardupilot uart3 speedybeef4v3…
I agree with @andyp1per that many VTX have no clear specification or good sw/hw implementation.
I made another trial with my RuiBet VTX and I noticed that sometime it shows a power change.
It seems that at least at poweron (with unlocked bit set in options) power level 800 is set.
Documentation of RuiBet declares pit mode available, but I played with pushbutton and what I got is one red flash, that is minimum power (five flashes is maximum). Not clear what exactly pit mode means for RuiBet, so far …
I am new to arducopter and today I got my first stable flight, after changing a few tuning parameters, found along arducopter discussions (yesterday my quad was vibrating after takeoff …, likely because PIDs were not suitable for a 5 inch quad), but I keep VTX power manually selected, Ruibet gets hot quite soon after poweron …
PS: at my first flight copter it overturned (motor order was not correct it was inav ordered) .
I’m using the Arducopter for SpeedyBee F405/BLHeli firmware and also can’t get the MATEK Optical Flow working properly with that version, Just the RangeFinder?
Yesterday I succeded in putting iblitz 1.6 w vtx to work on inav 8.0.0.
4 compilation trials.
Finally power selection works…
I think there is an initial misunderstanding about this protocol. …:
Betaflight vtx tables need not halfduplex communication.
Vtx model match is a oneway method, one cable, only tx from fc to vtx.
So You have only to choices:
compile in all the possible models
load vtx info during configiration steps.
In inav 8.0.0, commenting all not related stuff, and adding a compiled power table taken from official betaflight one, it works perfectly.
Also the named string for 1600mw must match : it is “1K6”, not “1600” :-).
I also got a irc power sel problem with recent arducopter on another vtx, but the copter source code is quite different from inav, so I have no idea hw toproceed.
Since rf power is a legal stuff, I do not understand why this topic is so under-considered.
I believe you got it wrong.
Tramp Protocol does not know about the real power levels of your VTX.
Instead Tramp uses a fixed set of values [25 100 200 400 600] which then map onto the real power levels of the VTX.
This is the point : …
I do not think this is true for all devices,
but all devices work in betaflight.
How then my modif works on inav using bf values ?
I did not use standard values, with standard values 25 200 400 800 only 400 and 800 mw are reached, 1600 does not work.