I have lowered ATC_ACCEL_R_MAX to be equal to ATC_ACCEL_R_MAX and that seemed to make the pitching forward a little better, however I am not that sure why.
The quad seemed a bit more stable in the air, however looking at the logs I am not sure though I thing that the ROLL P gain is too high and PITCH P is to low ???
You might want to run AT again with an aggressiveness of .09. Looks like there is still a little tuning to be done.
I just ran AT on my 1300mm Octo yesterday. I started at .05 then again at .08 then finally .1 For the Bigger copters it just seems to be a bit easier on the frames/motors this way
Something else I noticed, you have the Dynamic Harmonic Notch enabled and configured to use ESC telemetry, You don’t have any ESC telemetry data coming into the flight controller. So therefor the notch is not active.
Hi All, back again after tinkering and throwing out parts like crazy and trying to go to basics.
Threw out the 8 Kotleta20 ESCs (which I am sure were responsible for electronic interference and motors instability) and replace with my two good old 4in1 T-motor F55A ) in PWM mode. Lost telemetry but gained quietness on everything else. With the Kotleta20 CompassMot Test was at 60% interference and now below 10. Also, removed CAN from my GPSs, CAN is still too cumbersome and error prone (compass 1 becomes 3 and such if at all can connect using MP). I2C for now, and Also upgraded my Black to Orange with the ADSb carrier board.
Previously, motors worked very weird with weird imbalance, now seems perfect. Vehicle sounds quieter also.
So, to the point,
I had run 3 sessions of Autotune for each axis, the first was YAW and I chose to do it with 0.1 AGGR.
Than continue with RLL/PIT on 0.05, 0.07 and 0.1 AGGR.
One issue I had was after RLL with AGGR 0.7, Trying to take of for test after, the quad was shaking like crazy, so I lowered ATC_ACCEL_R_MAX to 53000 from where it was and ATC_ANG_RLL_P from 12 to 6 which seemed to resolved those vibration quite nice.
I feel I am very close to the perfect tuning, the quad seems pretty much solid in the air and I believe all you community experts (@dkemxr, @smartdave, @xfacta, @mboland, @Leonardthall ) out there might help me get the last notch.
On my bigger crafts I have the play with ATC_INPUT_TC. By default it is about 1.5. On the larger multi-rotors I find them very twitchy on the sticks. By raising this number it will damped the twitch. Keep raising the number until it feels good for you
@smartdave, It actually feels truly solid in the air I feel much more confident to push it hard now.
I think that my biggest issue is that this frame is not a perfect X but a little more like an H, front motors are closer to the back than left to right motors. So I get some diffs on the PIDs.
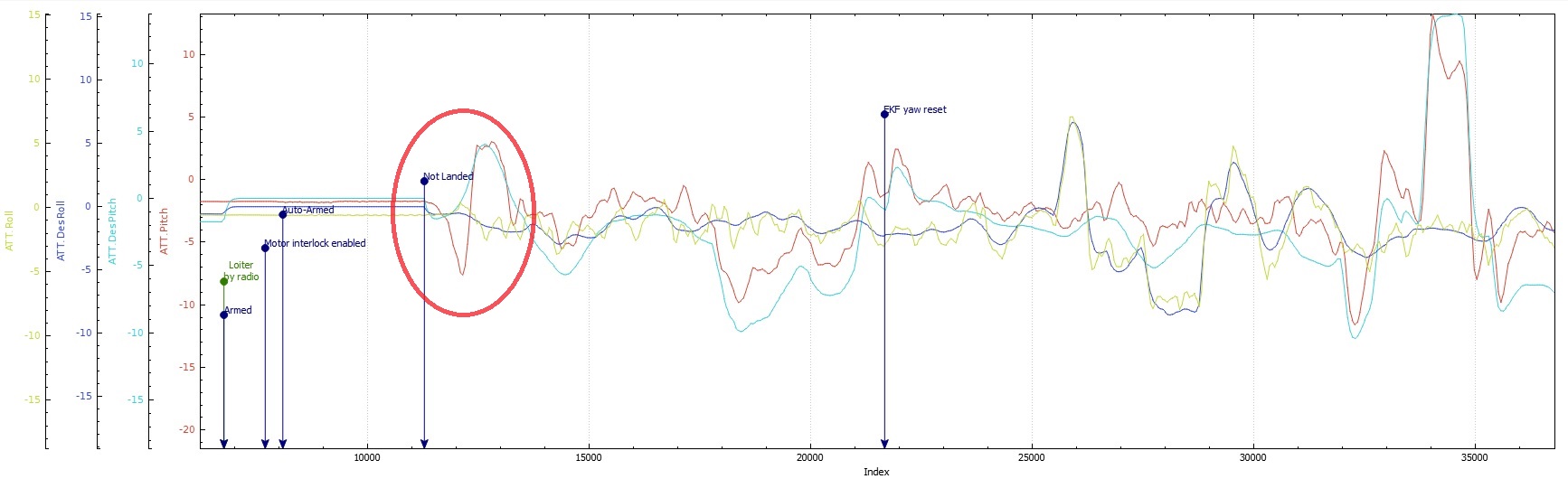
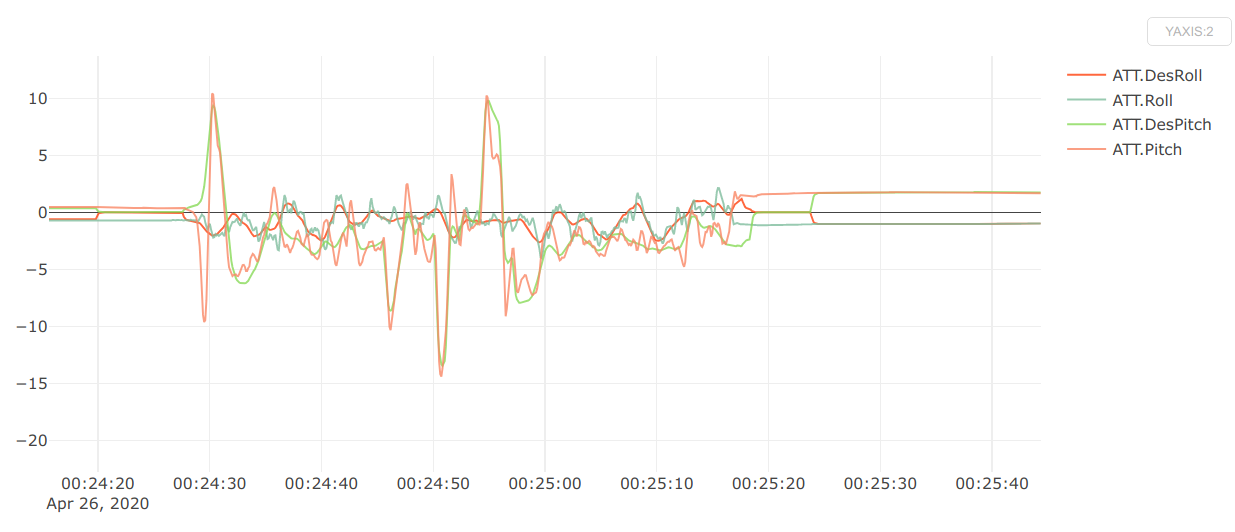
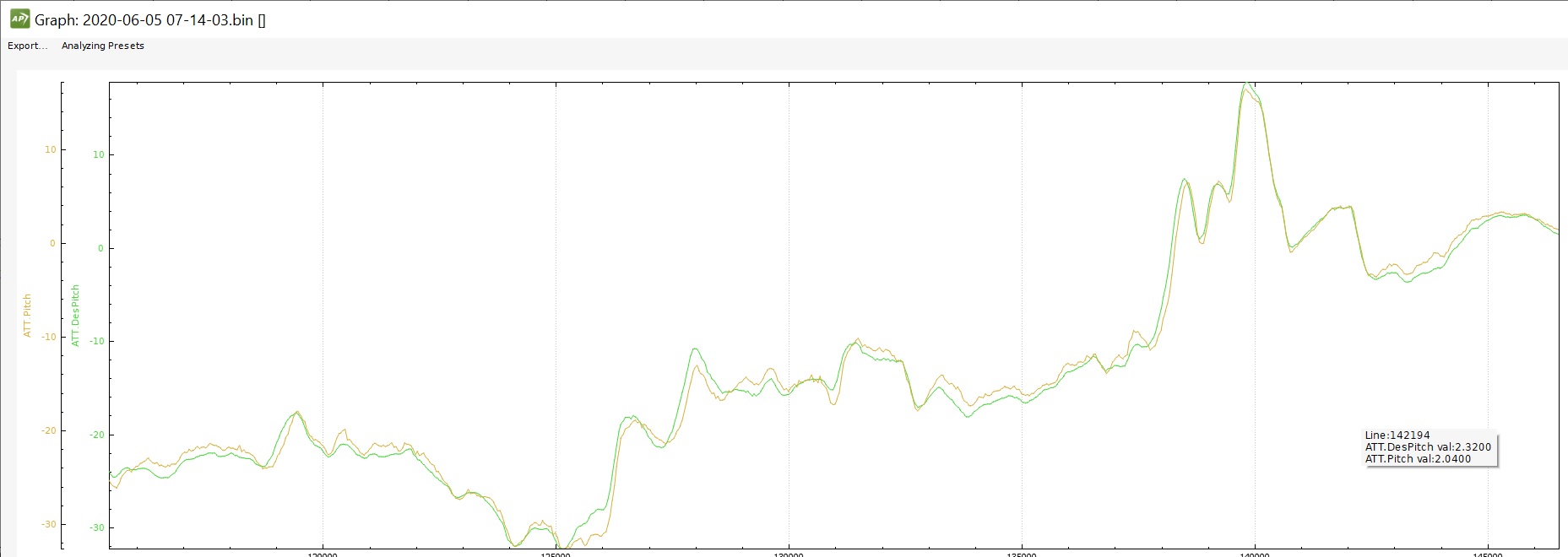
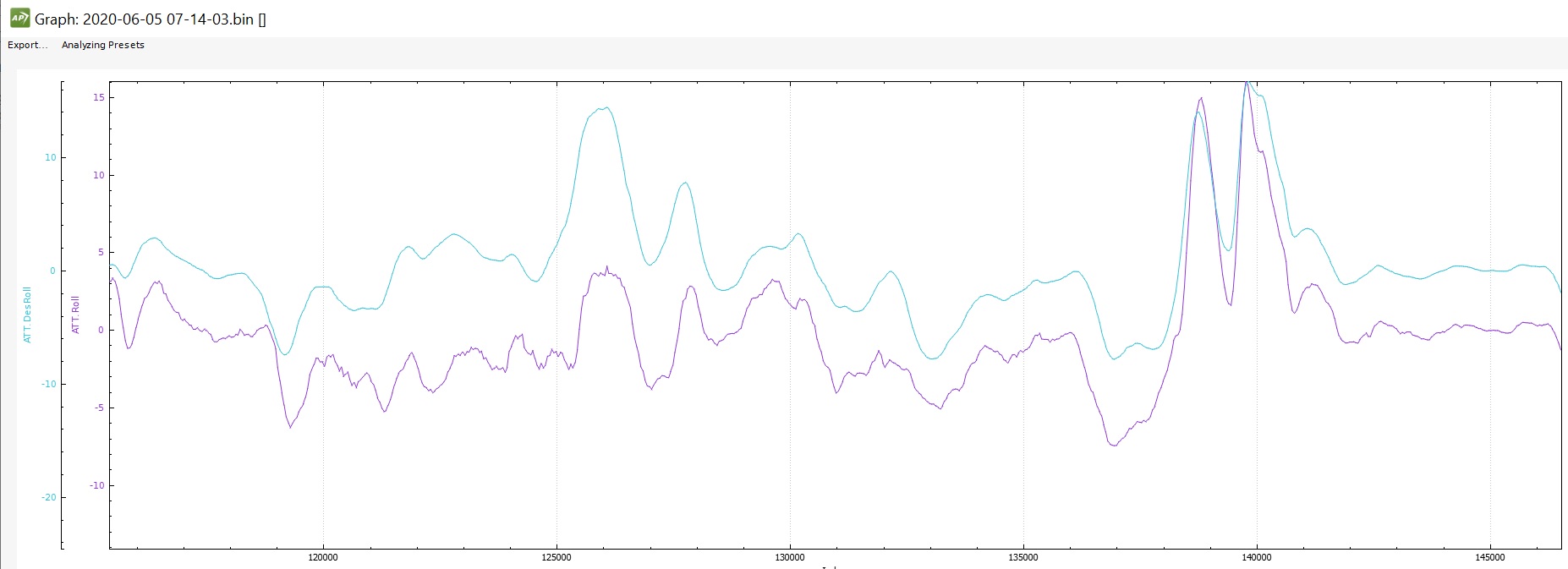
I think that everything is very close to be ok, just a little more to make the Roll and Pitch to better follow the desired
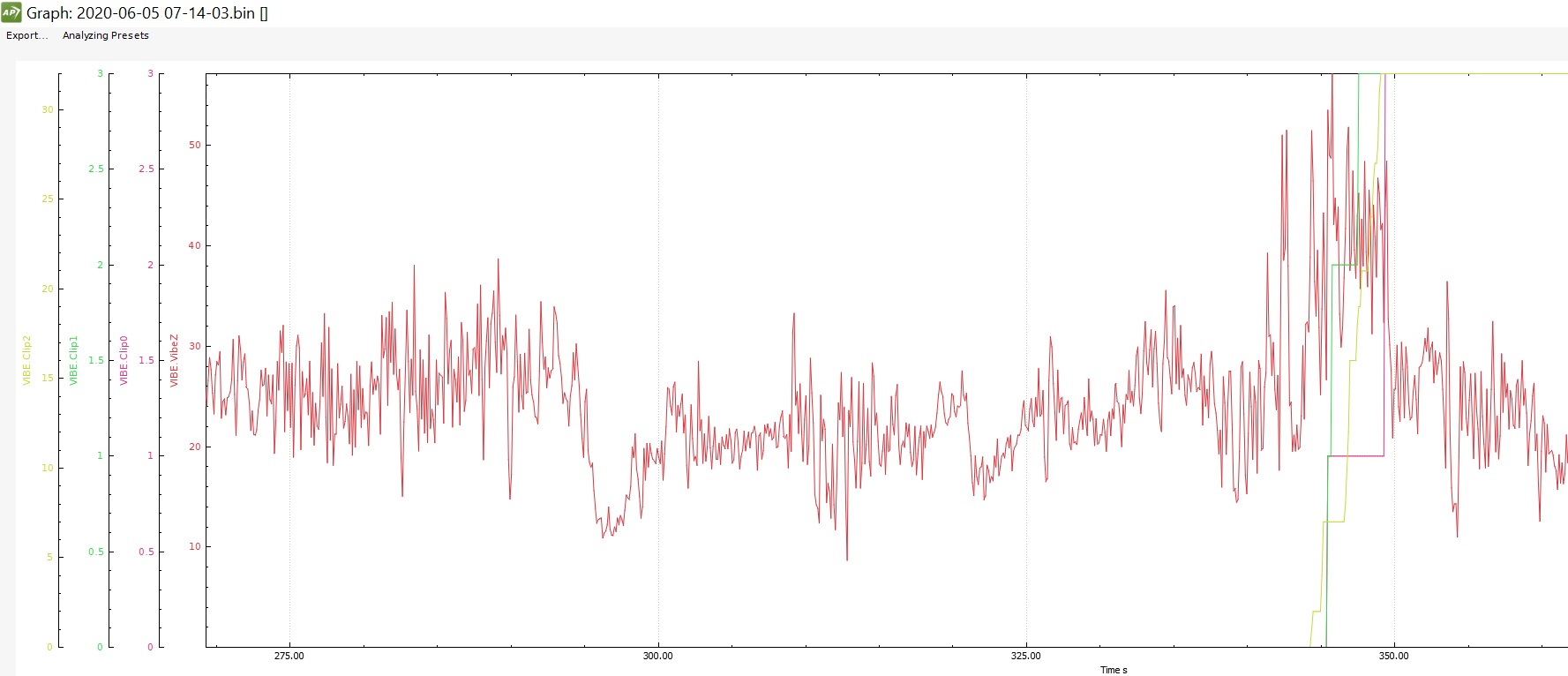
Hi Gal! I have been watching the logs and I think that vibes can still improve, your vbbes in Z axis are above the recommendations of 30m/s/s and in X axis and Y axis you have peaks of 23.6. And clipping that ideally should be 0, in z axis rises to 32. So if you reduce the vibrations, you will reduce the “noise” in the pwm output and you will improve your autotune.
Hi @davidae, actually, I wrote a reply saying that I never had an issue with clipping and such and maybe something got loose, however when I read carefully what you wrote and looking again at the vibes, it sank in slowly .
I never pushed my quad like I did today, so I might have an issue here that I need to deal with.
What bothers me however, most of the flight z-vibes didn’t go above one pick at 38 but all of a sudden it jumped to 57, any thoughts on this? (just noticed that this is where my throttle was highest).
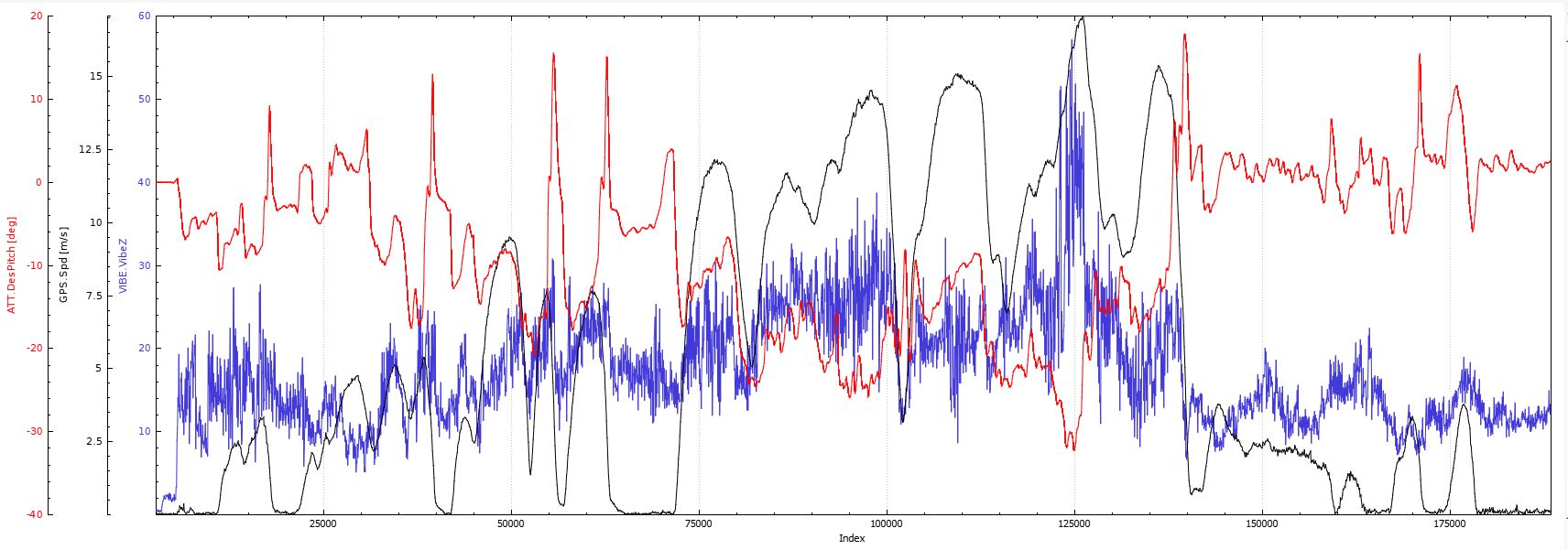
Hi Gal-Some comments on the vibes. Your Z vibes are high during forward flight/pitch events. At Hover they are pretty good. I see this on one of my craft with an FC mount that is probably too compliant. Same vibe spikes from fast forward flight and clipping events. I could try to fix this but actually I don’t see any consequence to this, it’s been flying very well for some time. Perhaps it’s the notch filtering (FFT based).
I’m not saying you can’t improve the vibe characteristics and it’s probably worth trying but there is a line you will come to with a mount that is too compliant, and hover vibes look fantastic, to a mount that is too rigid and the opposite is true. At least that’s been my experience.
Tuning is looking good. A bit of undershoot on Roll but no big deal it’s a big craft.
Hi Dave, ok now I see the picture. As you maybe notd I threw the CAN ESCs out and using pwm only so telemetry for the motors is out. If I remember you mentioned also FFT based on throttle?
Do you think it can work?
This quad is so powerful and mid throttle is very low. Will it have any impact on FFT? or I can go about it as last time with enabling the logs but the type I shall measure is the throttle?
About the tuning, I only locked the roll to pitch i.e coppied the values from the last AT at 0.1 aggr, however I lowered the ATC_ACCEL_R_MAX and it’s P gain hard because the quad was unflyiable
Thank you for looking at this
Gal
PS those vibes happened at speed about 16 or maybe 18/ms
Sorry Gal I should have been more specific. FFT referenced Notch filter is in Master. This doesn’t require ESC telemetry as it’s not RPM based. It runs a live FFT and determines notch filter characteristics on the fly. Powerful stuff. But with a craft like yours I don’t suppose I would be running a Dev version of firmware!
You can use a throttle referenced notch filter w/o ESC telemetry. Before ESC telemetry or FFT was available I used it and it worked well. This is available in current Stable.
Yes, I fly missions at 15 m/s and see the same thing.
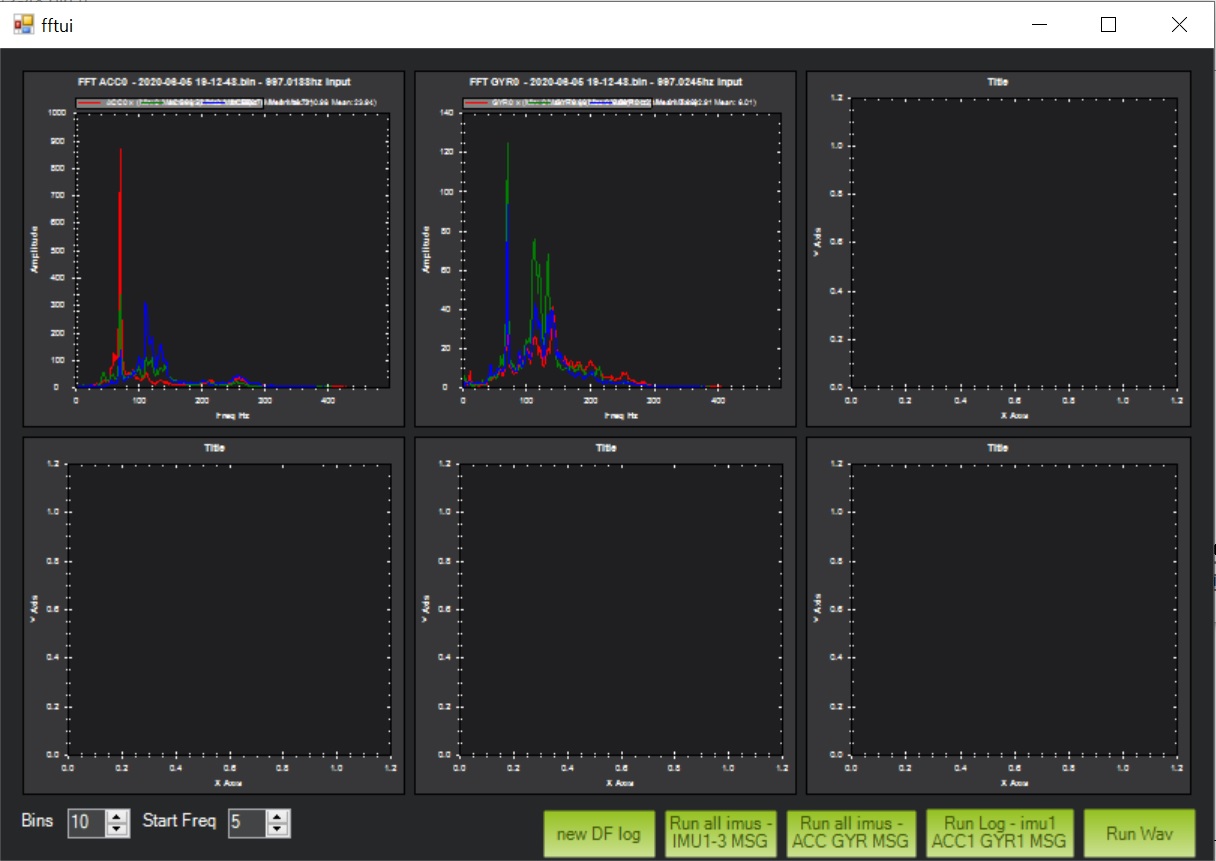
Cool. I believe Mr. Piper @andypiper would suggest an Hnotch frequency of 120Hz, start with a bandwidth of ~40Hz and an attenuation of 40db. 2 harmonics should do it. INS_HNTCH_MODE to 1 and INS_HNTCH_REF to .25.This will deal with the motor (RPM) generated mode.
Then use the fixed notch for what could be the frame mode at 72Hz with a narrow BW of ~15db and an attenuation of 40.
As discussed, vibe levels at hover look pretty good.
 .
.