Good morning Gal-Wow, the notch filters are really doing the job!! It quite dramatic.
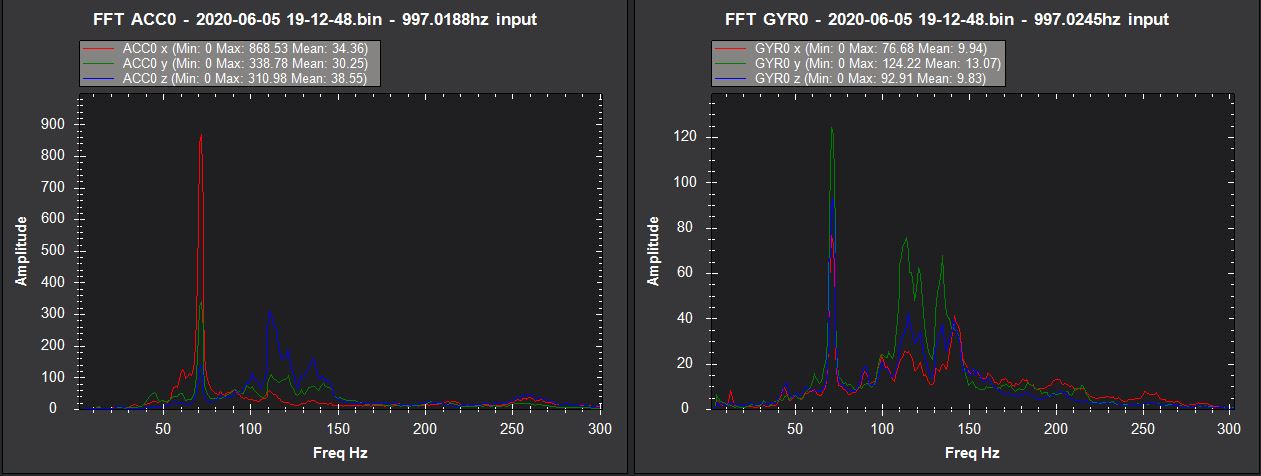
Here is the before:
And After:
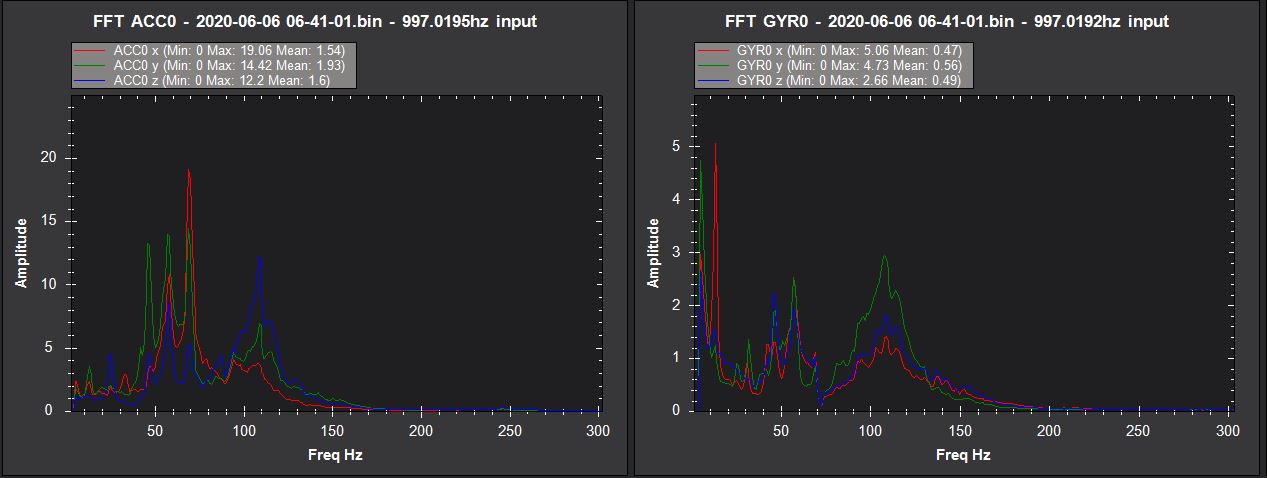
Look at the magnitude change between them. Very nice. I would carefully try some more agressive flying now. I don’t think you should have a problem but when I used a static notch filter with a center frequency too low it effected the control. If anything feels sluggish this could be it. But so far it looks great!. Nice work my friend.