It sounds like your tune is extremely conservative based on the acceleration behavior and slow yaw.
However, since you indicate very limited tuning time, perhaps a mission with CONDITION_YAW and CONDITION_DELAY commands could be of use. This one flies a rectangular pattern in cardinal directions (each waypoint is due S/W/N of the previous). CONDITION_YAW forces a heading change, and CONDITION_DELAY allows for enough time to achieve the desired heading prior to continuing on the trajectory.
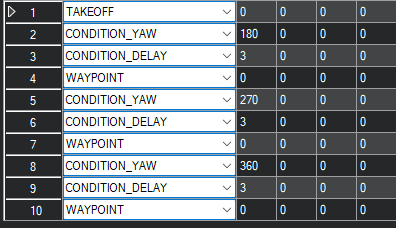
EDIT: (a bit of testing in SITL shows that CONDITION_DELAY may be unnecessary)