This question could alternatively be posed as: how to yaw during loiter only?
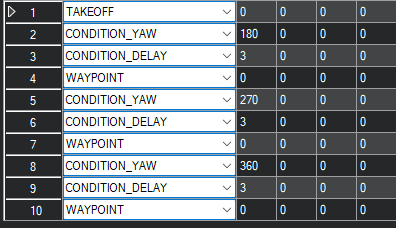
For verification purposes, I am trying to fly a square box in straight lines, repeatedly. It is important that the drone always “looks in the direction it is moving” until it reaches its waypoint.
Currently, when it goes from loiter to straight line flight, it will adjust its heading in flight, and only have the right heading halfway the line. (i.e. it will start moving and yawing at the same time).
I want to avoid that. I would like to have the drone turn its direction/heading while it is hovering, and not while it is flying in a straight line. If required, let me know and I can upload a logfile. You can also reproduce this error in MissionPlanner simulation.
Gear:
- Cube Pilot with an CubeOrange
- Foxtech hover 1
Any advice on settings or tricks is appreciated. Currently the plan is to fly straight lines and then yaw the drone manually, and then fly off again. That isn’t as systematic as I would like to have it, of course.
Kind regards,
Erik