I’m trying to configure my first VTOL tailsitter but I’m not finding anymore ELEVON_OUTPUT parameter.
I have configured SERVO5_FUNCTION=4 (right elevon) and SERVO6_FUNCTION=19 (left elevon) but the elevons do not move together since ELEVON_OUTPUT is not there.
Q_FRAME_CLASS = 10
Q_FRAME_TYPE = 1 , this might be wrong…
In Mission Planner, Radio Calibration , I cannot select “elevon” box.
Ok, Elevon_output is gone, now the procedure is to configure servo outputs with the right numbers , 77 and 78.
The point is that when in FBWA mode the attitude correction might be wrong so you must modify in Mission Planner Pitch and Roll using “Reverse” checkbox.
In the guide there is no reference to the configuration problem that I found yesterday:
In manual mode the servo outputs work as they should and elevons had correct mixing but in FBWA mode the attitude corrections were wrong, a pitch attitude made ailerons to move while a roll movement moved the elevator .
The way to correct it was to modify in Mission Planner Pitch and Roll using “Reverse” checkbox.
I did a VTOL test holding the battery as a leash and the attitude control in QSTABILIZE was good
But with the battery , that it is not in the center of mass but in the upper wing of the plane at take off the plane tilted on that side, so as I read, the respect of center of mass is crucial.
Is a GPS mandatory for VTOL ?
I do not see any reason for at least in the first tests.
Is it better to post here about VTOL or continue the huge dual-motor-tailsitters tread in Development Team section ?
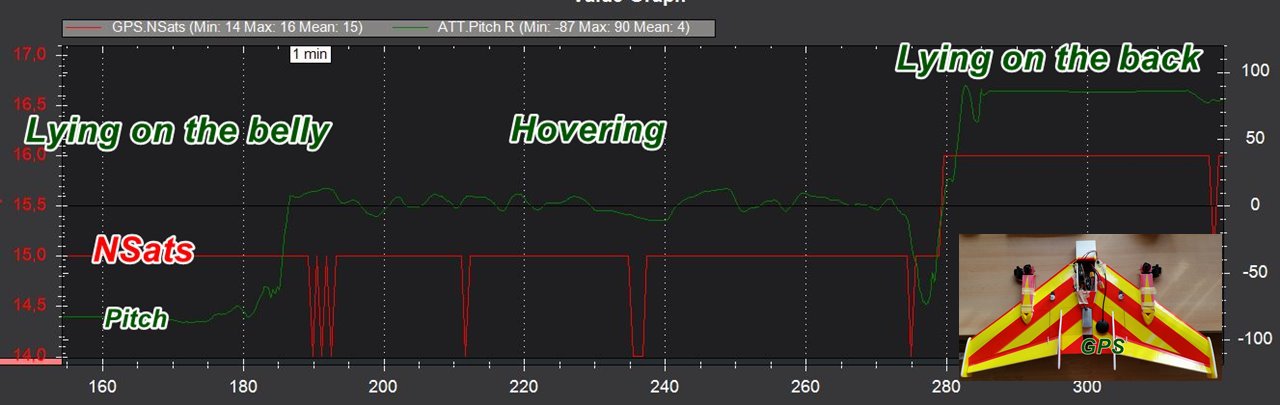
I’ve been using EKF3 (parameter AHRS_EKF_TYPE=3) and waiting for the message: “EKF3 IMU0 is using GPS” before takeoff. Attitude estimation probably won’t work well without GPS, so poor control is more likely without it.
My 3DR GPS module works fine in hover mode; I’d recommend that you install a GPS before doing any more flight testing.
Hi kd0aij,
what kind of plane are you using ? A quadplane ?
With a tail sitter plane the Gps is not pointing to the sky but it is 90° rotated, the Gps will never get a good satellite signal but a lot of reflections and the resulting position will be unreliable.
Attitude is not determined by Gps but by gyros and accelerometers.
@lucamax This is a good reason to scan the “huge dual-motor-tailsitters” thread (and not to break it up IMHO)… See my posts here: Dual-motor tailsitters and here: Dual-motor tailsitters
You can see the 3DR GPS module in the video.
Hi all,
I just put the 3.8.0 on an FX-61 set the 77+78 and rolled the plane in my hand.
Roll reaction is ok, but i get no pitch reaction. funny thing is that I imported my settings from the other FX-61 flying 3.7.x . no tailsiter just old flying wing.
I wanted to load 3.7.1 so i can least do the maiden but MP cannot locate any previous version.
can anyone help me out?