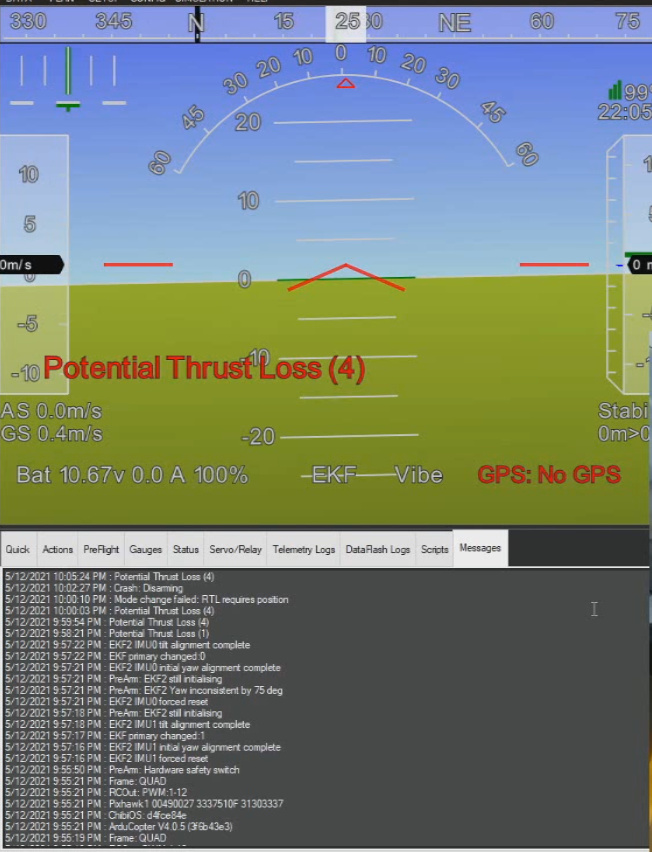
What does Potential Thrust loss means I’m also experience whenever i pull up my switch my (3)Brushless motor and ESC works fine but other (1) Brushless motor and ESC doesnt even move its like dead or something but whenever i switch on my safety swtich it goes beep beep and its normal right but im also exepriencing a NO GPS whenever i test it outside for Compass calibration i also got this message too. what does it mean can someone help me im struggling with this :(((
What it sounds like it means. You are on the bench with no props thus no thrust.
It will make that sound if the ESC is not getting a throttle signal.
The only compass being recognized is the Flight Controller Internal compass. The compass in the GPS module is not and GPS is not working so it’s either wired wrong or the module is bad.
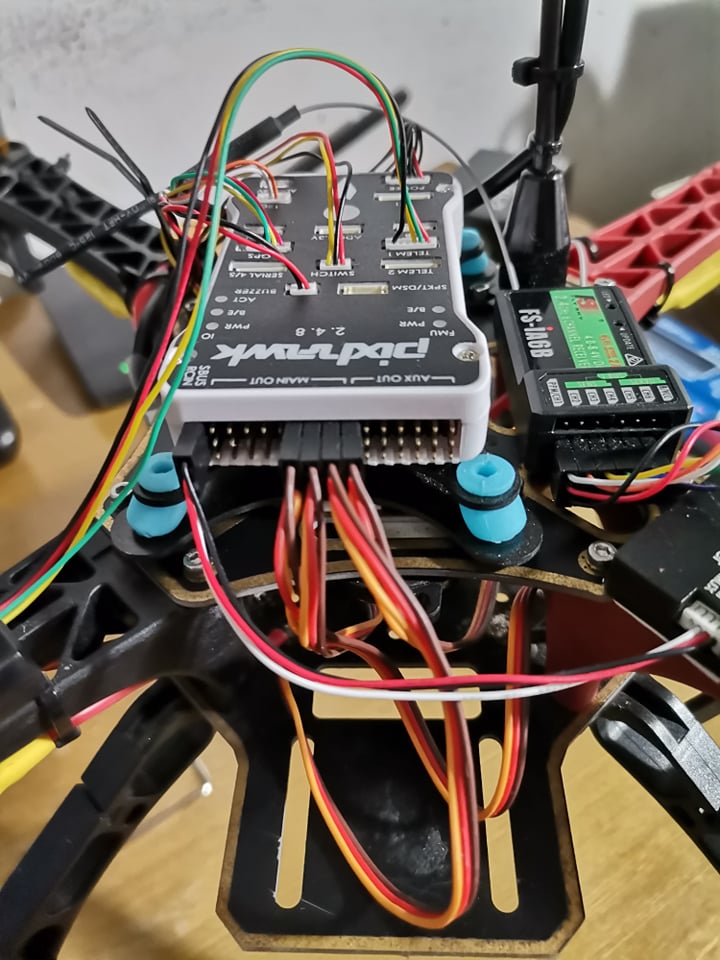
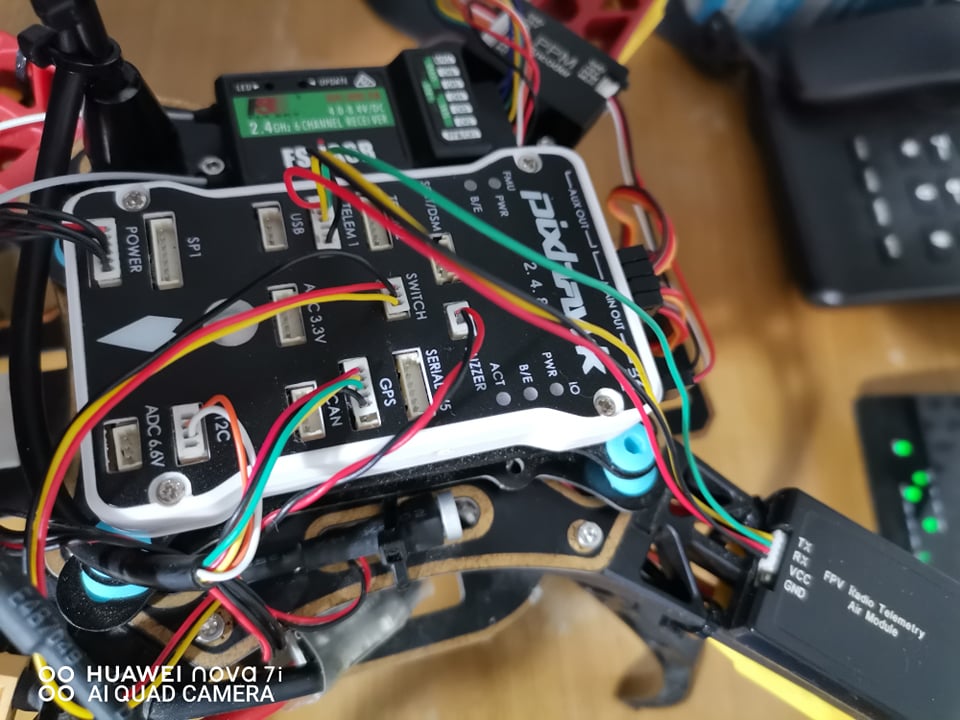
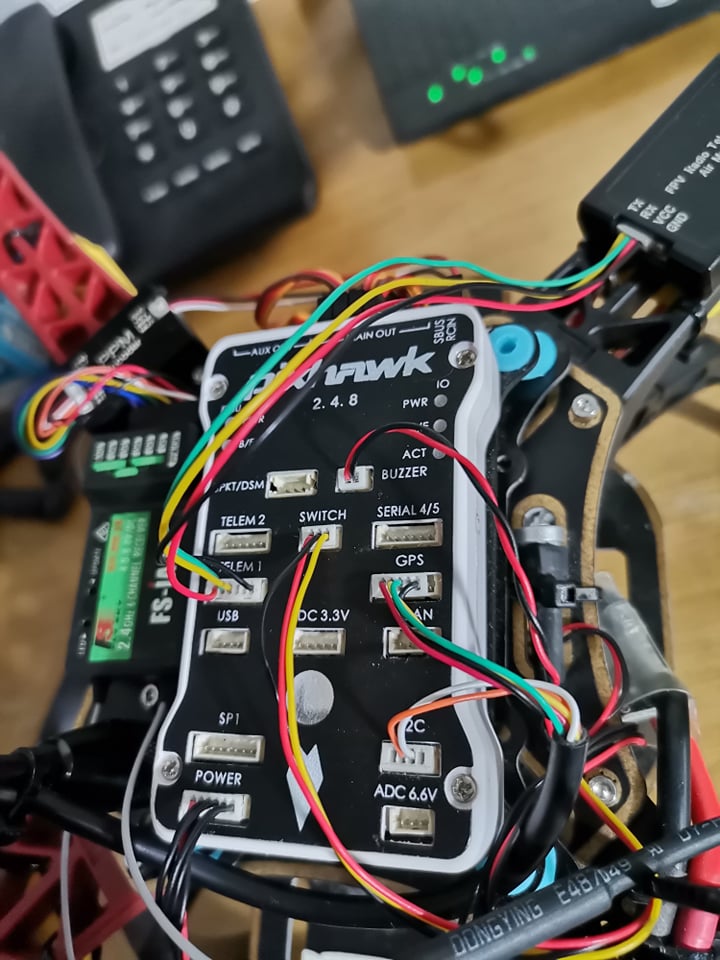
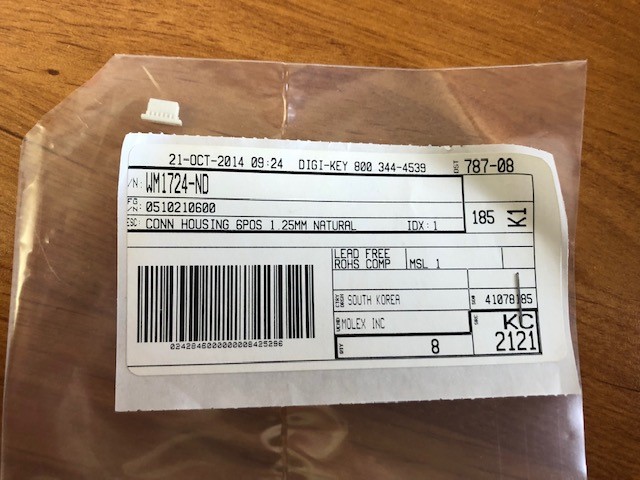
Take some photos of how the ESC’s and GPS module is connected.
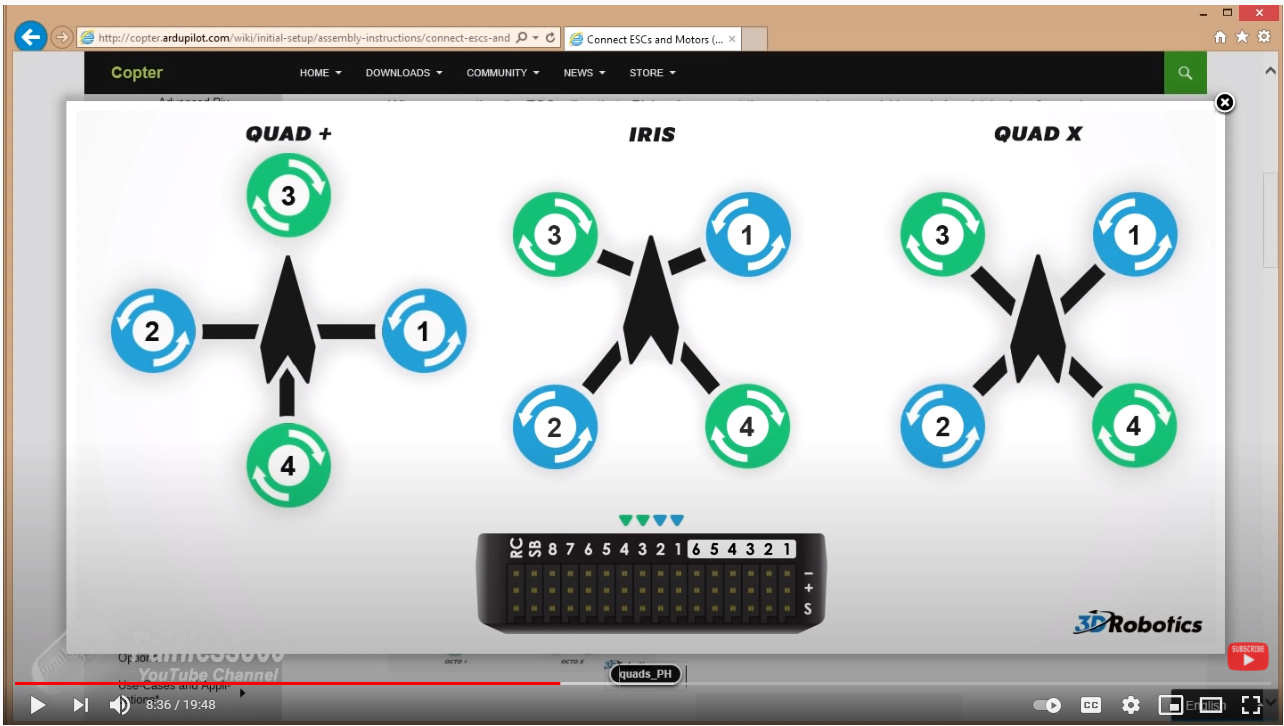
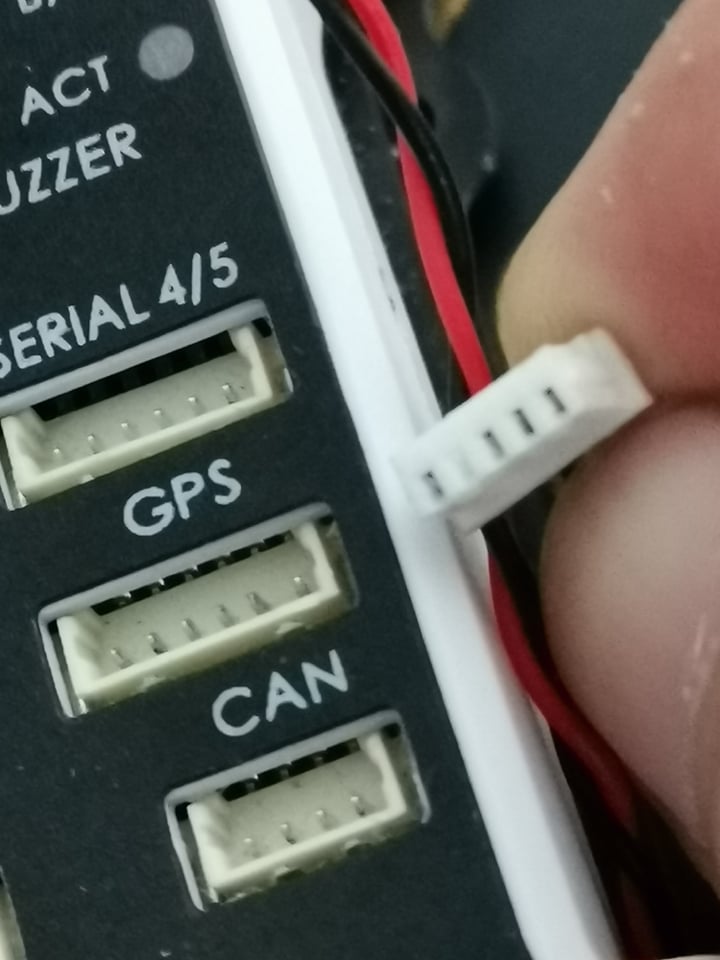
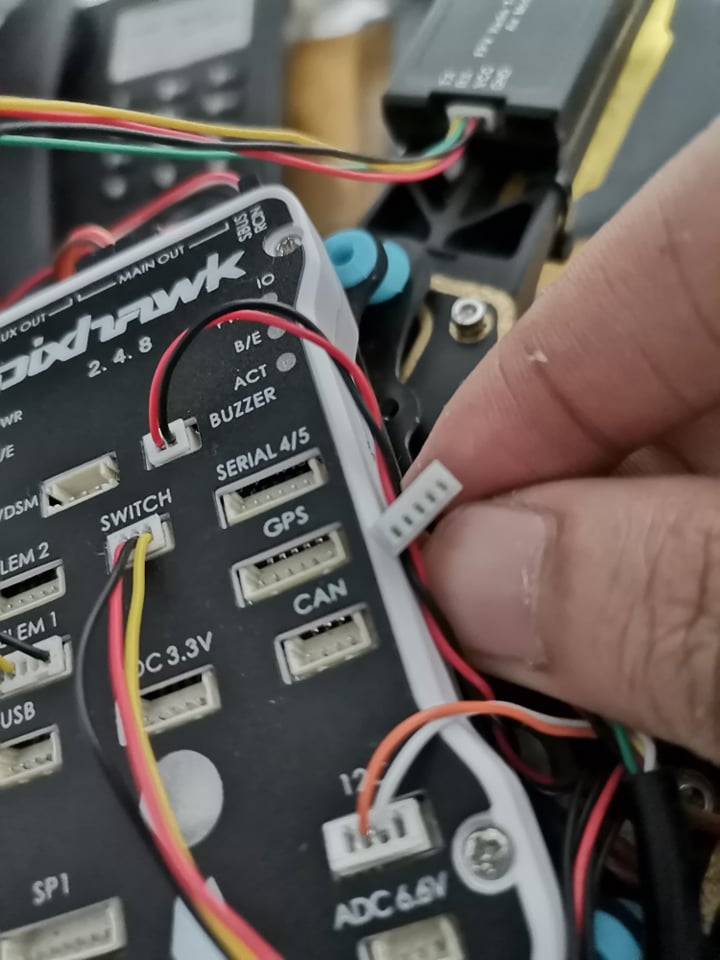
The Motor outputs look correct but you have the wrong connector on the GPS module. You have jammed a 5 pin connector into a 6 pin socket. Many GPS modules come with both connectors, in any case you need to change it to a 6pin connector. Hopefully you didn’t smoke it.
I wasn’t talking about the sound. I was simply saying you will get a Loss of Thrust message if there is no thrust. Which of course there isn’t on the bench with no props.
i already have one gladly i didnt throw in the trash can when i was cleaning my room now it works perfectly thank you mr. for helping me with my project ill update you soon with my drone :)))
Yes, I heard that in the other video. Perhaps the ESC is bad. Those ESC’s are very poor quality. Buy 6 to get 4 working units. Those motors with collet prop adapters are a poor choice also. Typical cheap kit parts many fall prey to.
i manage to test all of my ESC with Servo Tester it work pretty well when it comes to my pixhawk its so sad to hear that my ESC is broken :((( i have no more budget left so sad.
OK, try removing the red wire (center one) from all of the ESC’s at the connector to the Flight Controller. Just pull the pins outs and tape them back so you only have signal and ground connected to the Flight Controller. Then test again.
so i manage to fix the problem that I’m having, so i have a one problem is stabilizing the controller and the drone because it’s too much power it goes nuts whenever I pull up the trigger.
Are you still testing it on the bench w/o props? If so this is meaningless. Perform all mandatory calibrations, check the motor order and direction with Mission Planners Motor Test function. Then set the Initial Tuning parameters as per this guide and go fly it. https://ardupilot.org/copter/docs/tuning-process-instructions.html
That’s a link to the full parameter list, you don’t need anything from there. I posted a link to the Initial Tuning parameters. Or, connect to Misison Planner and hit Alt>A, input the info as prompted and make those changes.
It will not “fly perfectly” even after doing this, further tuning is almost always required.