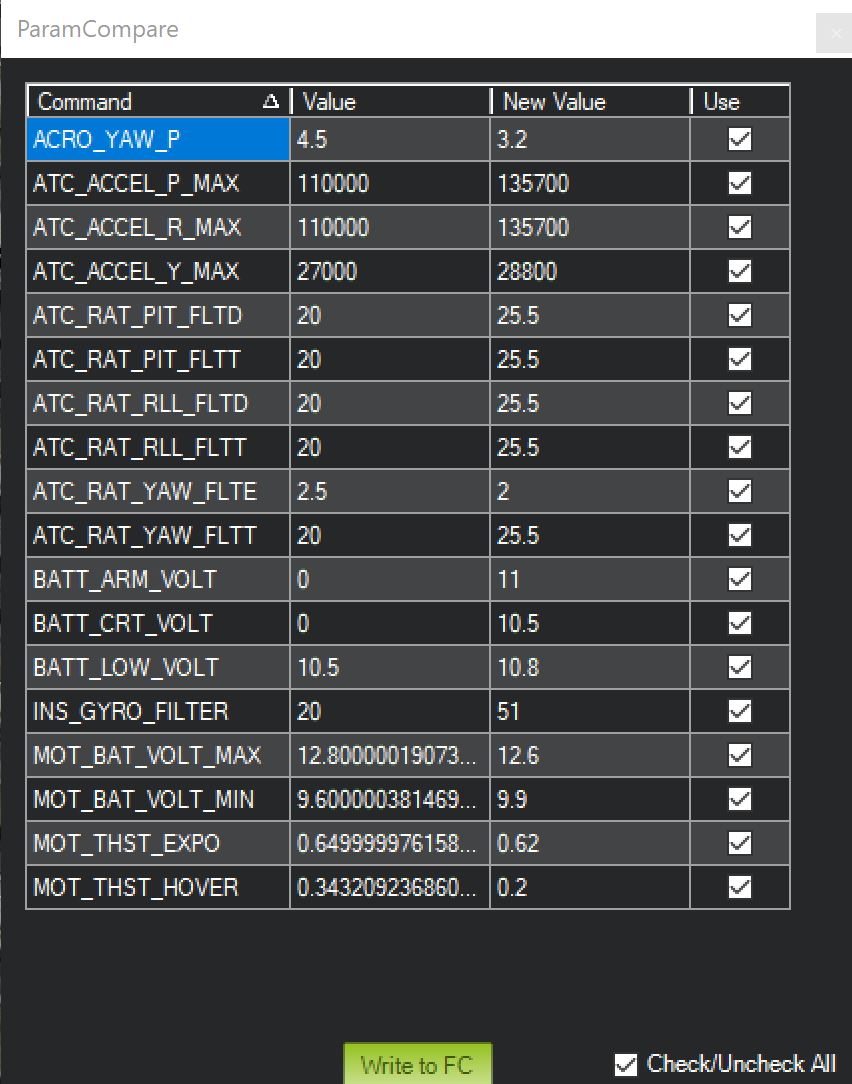
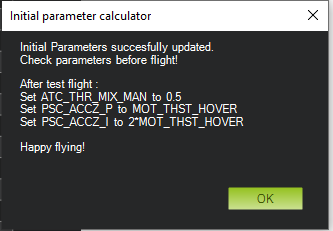
this are my “paramcompare” what should i do for tuning my drone.
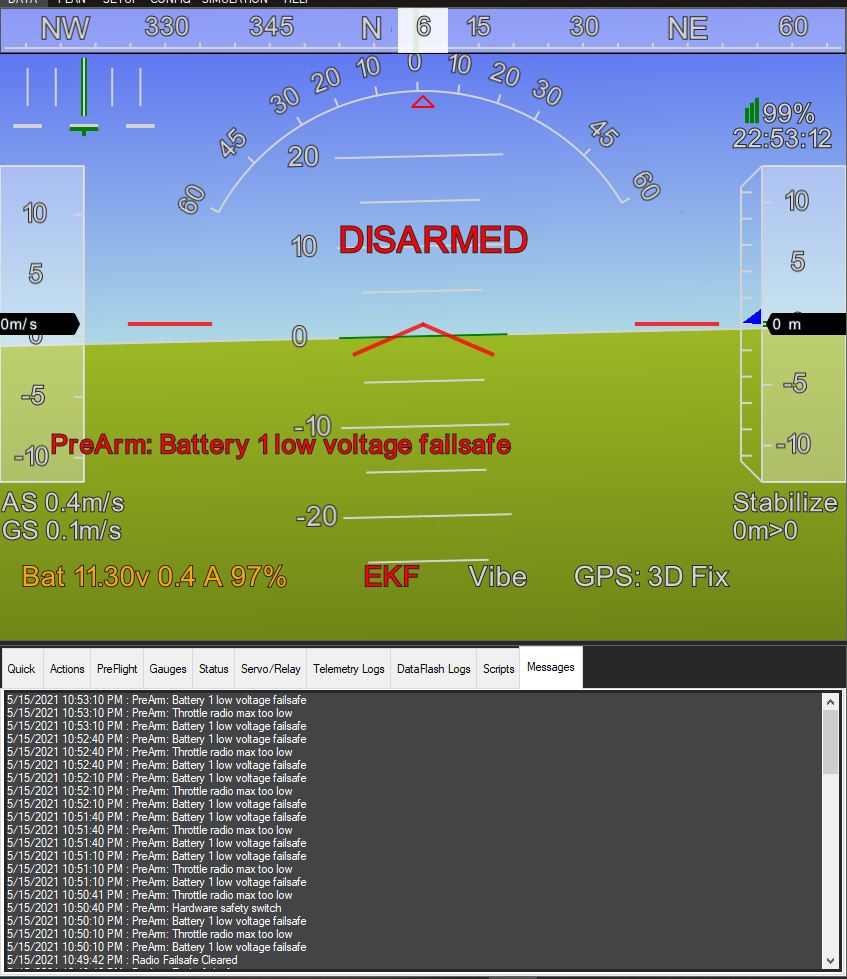
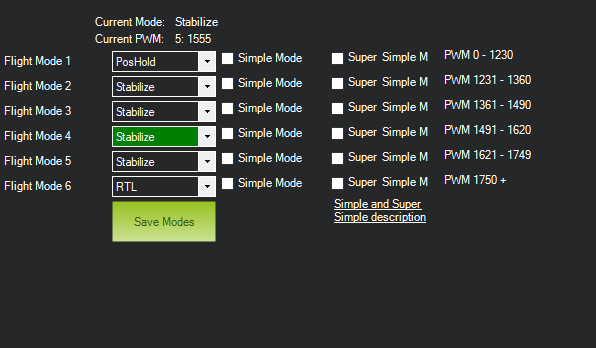
in the 2nd photo is it good now to flight and also this is my flight mode what should i change it
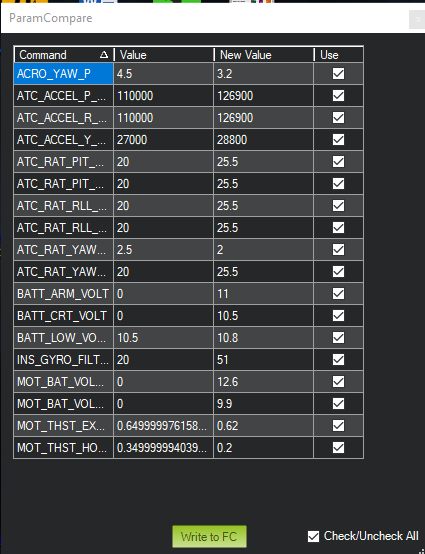
this are my “paramcompare” what should i do for tuning my drone.
in the 2nd photo is it good now to flight and also this is my flight mode what should i change it
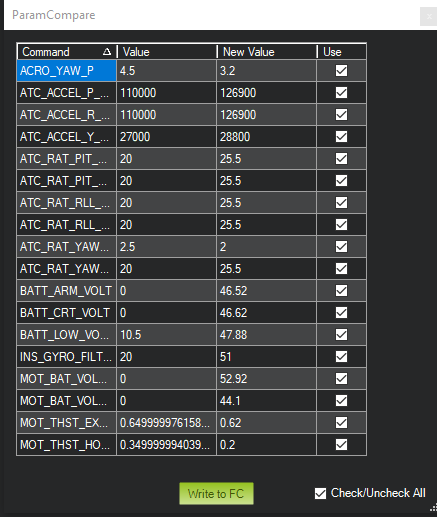
Some of those values don’t look right. What size props do you have and what battery power (3S, 4S)?
Configure whatever flight modes you want.
I have 8-inch props and a 3S Lipo-Battery.
okay i figure it out what flight modes i want, but in my ParamCompare i put the information what it needs so you think my PAram is bad.
ill do it again later, waiting for my battery to get fully charged. then i manage to tuning my throttle whenever its a default setting its to high for me it will crash the drone 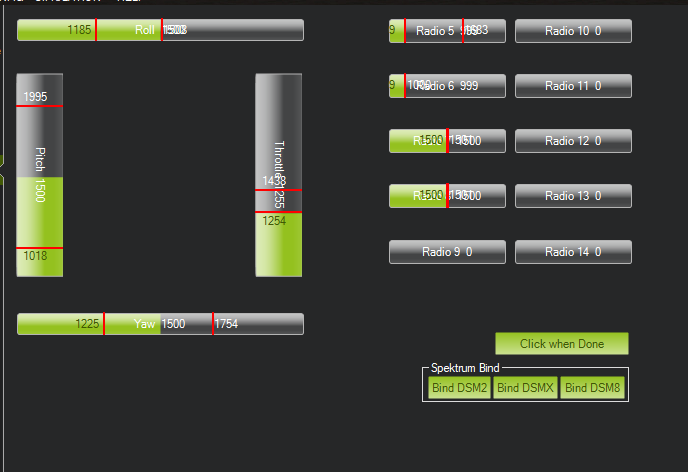
im also trying to get a best throttle so drone will not crash when armed.
This makes no sense. That’s the radio calibration screen, no “tuning” is done there. Make full displacement of the sticks or you will have trouble later.
And, you don’t want to attempt flight with the wrong parameters you set.
Also, have you run the Motor Test function in Mission Planner to conform the motor order and prop direction is correct?
I have this Battery LED indicator it shows my voltage its “12.1v” but in the mission planner it shows it should be the same right.
It depends on what you have the battery failsafe set to. You should really read the Wiki for these things, you are asking basic questions that are covered there. Post on here after you have done that and you still have a problem.
Here is a clue. Google “arducopter battery failsafe” and click the 1st link. For anything you have a question about Google “arducopter (or pixhawk) XXXXX”.