So I am making an autonomous self-driving RC race car but I need to drive it around the track collecting the speed and steering angle per frame as there will be a camera attached. Is there any way to do this? I am new to building RC cars and to the electronic components as I mainly just code. Any tips would be great! Thank you!
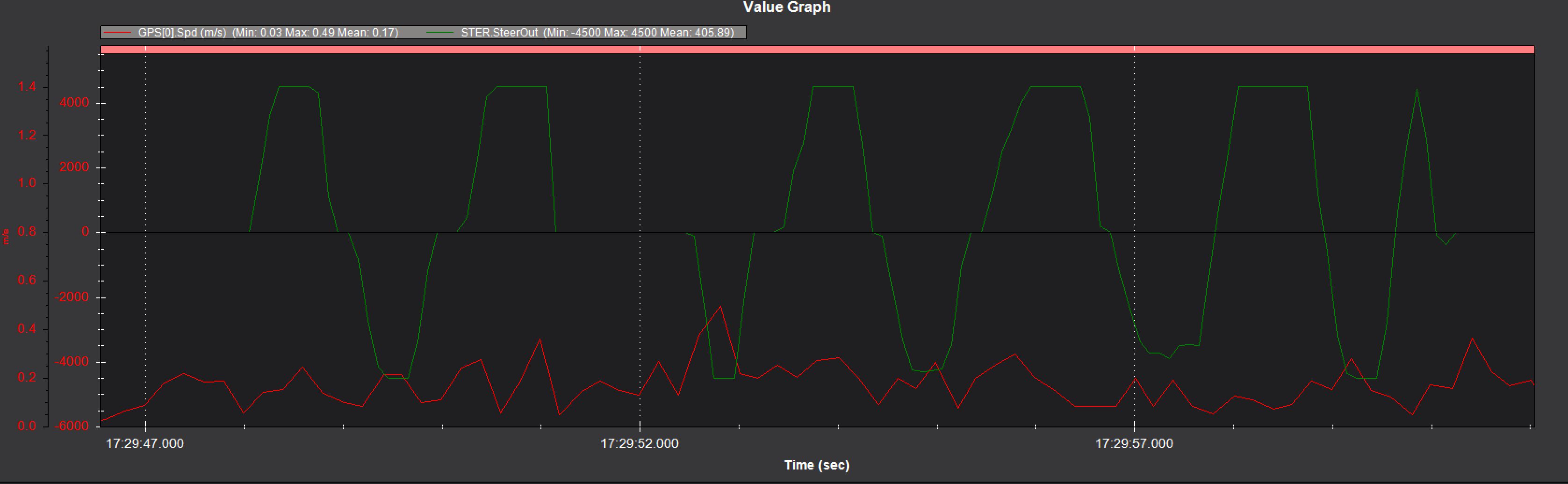
GPS gives you speed and the Steer logged parameters give you turn angle. Not sure how to synchronize it with a camera, perhaps the guys doing geotagging can help.