I’m testing Copter-4.1-beta1 before flashing it into my copter. SITL shows very high yaw oscillations when descending fast vertically. I set the descent rate to 5m/s and the climb rate to 3.5m/s. Is this a known issue? I’m afraid my copter could do the same in real life. I’m also leaving the log here https://1drv.ms/u/s!ArMDLLLI-Jmi9yhWfcOZSvdCv8Xh?e=jOR6OW
Hi Tony,
I don’t think it’s a problem with 4.1 specifically, more of a general tuning issue. I took Yaw/Desired Yaw off this graph because it comes out too messy, but you can see some of the same effect in Pitch and Roll during decent.
During the ascent and horizontal part of the flight the Pitch/Roll graph line shouldn’t be all jagged like they are.
Have you got a .bin log for the real aircraft flying? And what are it’s specs?
EDIT: I’m seeing the same thing in SITL, testing more…
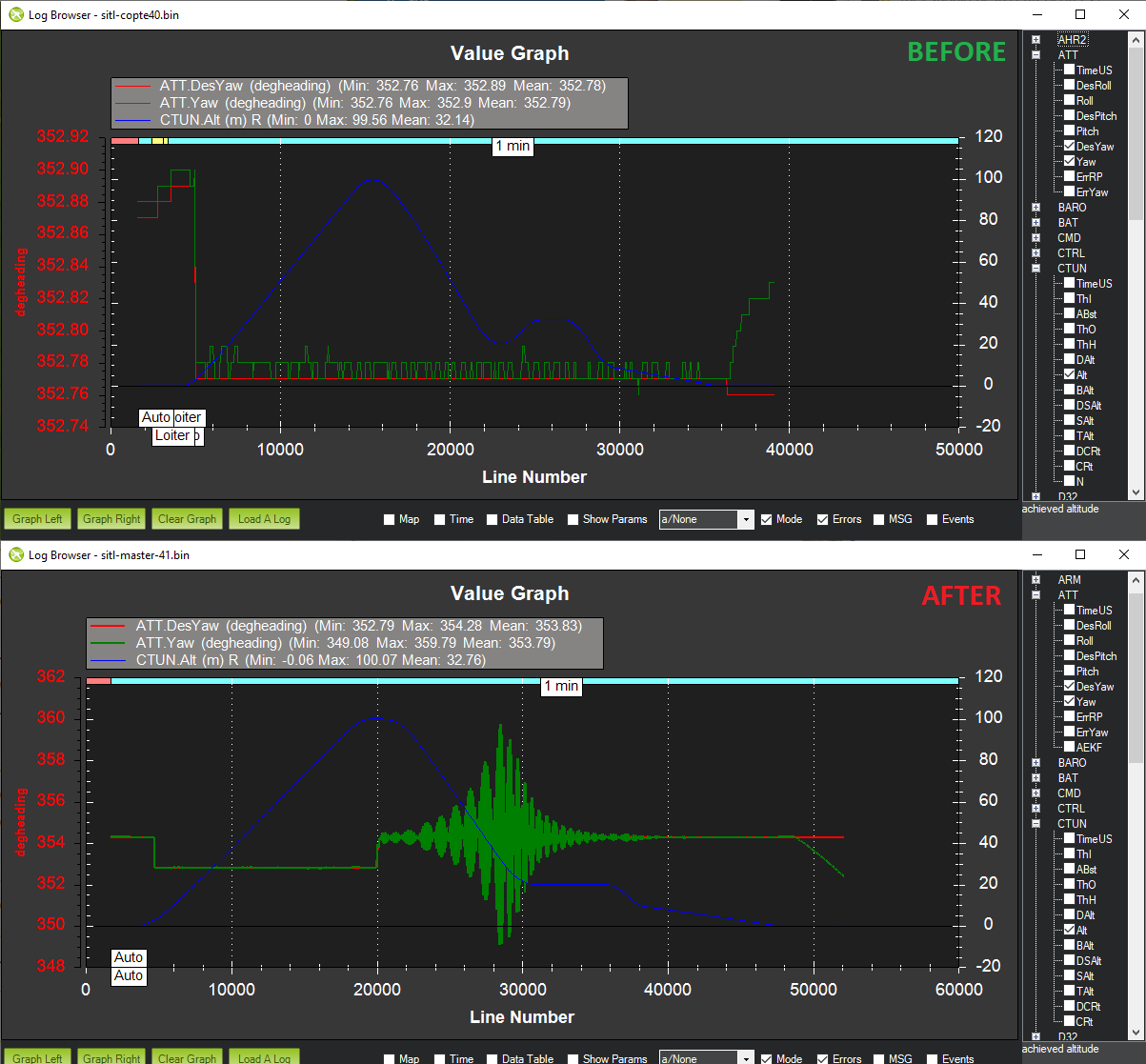
Thanks very much for the report, I’ve reproduced the difference you’ve seen and confirmed the SITL behaviour is different between 4.0 and 4.1. The next question for @Leonardthall is whether this is simply a tuning issue or a real issue in the attitude controller.
Below is a screenshot of the different after creating a simple takeoff + descent missions with WPNAV_SPEED_UP = 350 and WPNAV_SPEED_DN = 500.
I’ve discussed this with Leonard and he seems confident that this is a tuning issue caused by changes made to the SITL model to make it more realistic He says that if this was a real software issue he would have noticed on his own vehicles.
I hope to repeat this test on a real vehicle doing back-to-back tests with Copter-4.0 and 4.1 but I can’t immediately promise when.
Thank you @rmackay9. I’ll give it a try tomorrow with my real copter. I’m keeping the PID values same as in Copter-4.0. If I see the oscillation in flight, then I’ll run autotune and then try again. I’ll keep you posted.
I couldn’t fly last Friday due to bad weather, I have plans to fly my copter this week though. In the meantime, I’m putting Leonard’s theory to test, so I started a SITL sim and run autotune, but the autotune didn’t engage and a message was displayed on the hud saying “led”. Here are the commands that I ran: mode guided, arm throttle, takeoff 30, mode autotune and nothing happened. I can’t figure out what went wrong here, could this be another issue?
Thanks
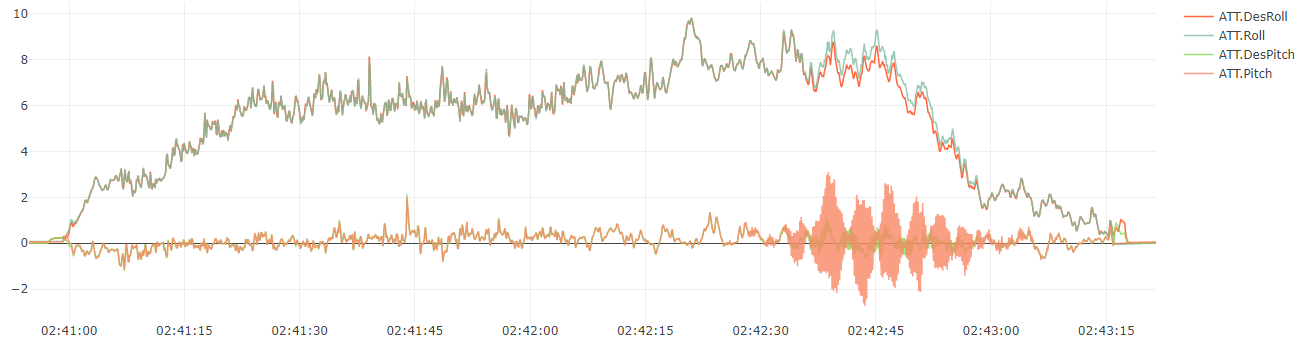
@rmackay9 I did 4 flights yesterday using Copter-4.1-beta1 and they were all successful! I kept the same PID values as in Copter-4.0. I didn’t see any yaw oscillation during a fast descent. But the logs show very little oscillations (see image below) but nothing to worry about in my opinion.