Minor issue:
It seems that Copter 4.1.0 does not support the IrisRos frame. But, I can still see the IrisRos, djix, frame on sim_vehicle.py --help. Thanks!
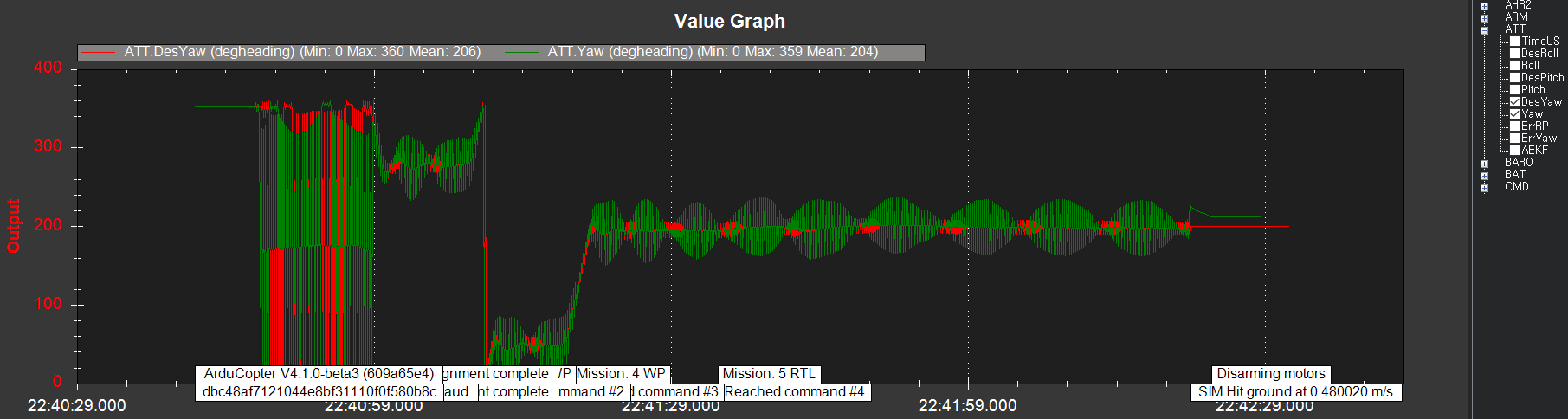
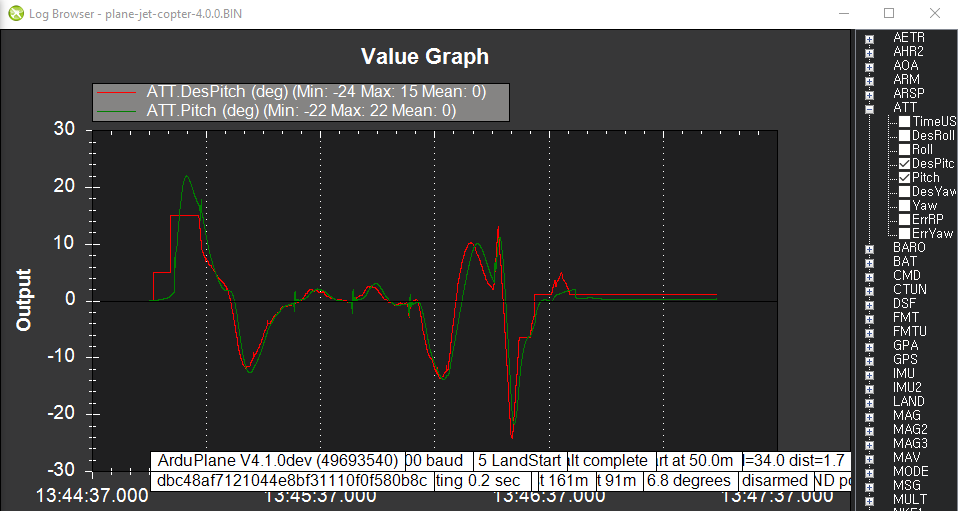
Edit: I could not find such unstable yaw angles in Copter 4.0.0 version (49693540bd555a44d30fc33366b1b8a24977e429).
I think you’re only seeing this yaw oscillations in SITL right? This was reported a couple of weeks ago as well and we confirmed that it is just because we modified the SITL model but haven’t updated the tuning parameters (in SITL).
We don’t think you’ll see a problem on a real vehicle.
Hi @rmackay9.
Yes, I only saw the yaw oscillations in SITL.
I check the PR to fix this issue. Thanks!
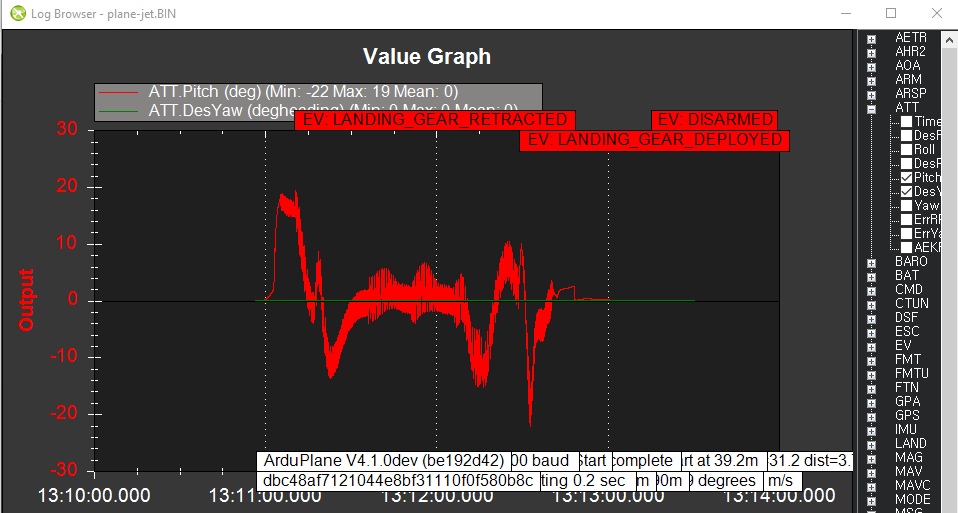
Edit: I tested multiple frames in ArduPlane and noticed that this issue also exists in ArduPlane (using SITL).
I am not sure whether this is known issue or not. Just in case, I would like to describe the issue in here.
plane-dspoilers - segmentation fault
plane-jet - roll and pitch oscillations
plane-soaring - unstable pitch angles
plane-tailsitter - Gyros inconsistent / could not take off
quadplane-tilthvec - roll and pitch oscillations
quadplane-tilttri - roll and pitch oscillations
quadplane-tilttrivec - roll and pitch oscillations
quadplane-tri - roll and pitch oscillations
The below figure shows pitch angles when I tested plane-jet in Copter 4.1.0-beta3.
ok thanks for the report. I think for this some of the ATC_RAT_xxx parameter gains will need to be reduced. Sorry to “pass the buck” but I’ll leave this for the plane guys to fix. Hopefully their beta testing will start in the next couple of weeks.