Hi Dave,
I think I made a mistake when I said that. I think it is supposed to be accel/vel. That is not good!!
So in your case it looks like it would be useful to set the FF. It would be something like 7/20.
Hi Dave,
I think I made a mistake when I said that. I think it is supposed to be accel/vel. That is not good!!
So in your case it looks like it would be useful to set the FF. It would be something like 7/20.
@Leonardthall hi Leo sorry for disturbing do you have any advice about losing altitude during fast forward speed I covered the Barometer and increase EK3_ALT_M_NSE =3 But still like losing Altitude.
What value I can start with for this Parameter?
Try using GPS altitude.
EK3_SRC1_POSZ,3
Thanks and for these two values any suggestions?
PSC_VELXY_FF = 0.2
EK3_ALT_M_NSE=2.7
I don’t change EK3_ALT_M_NSE.
I would need to see a log to make any comment on PSC_VELXY_FF
Logs sent already ![]() and mentioned you
and mentioned you ![]() .
.
Try
PSC_VELXY_FF = 0.46
Today maiden done with Autotune and adjust parameters as discussed with you before, it was flying Amazing no wind at all today speed test done reach 38 m/s max with max angle 75 degree and using GPS for altitude hold and it performs well even my gps is very old M6 but sadly it fall from the sky at about 45 meter hight one motor Damaged and all propellers of course. But overall test was successful for me but I need higher new motor thurst for more speed as I think I touch the limit.
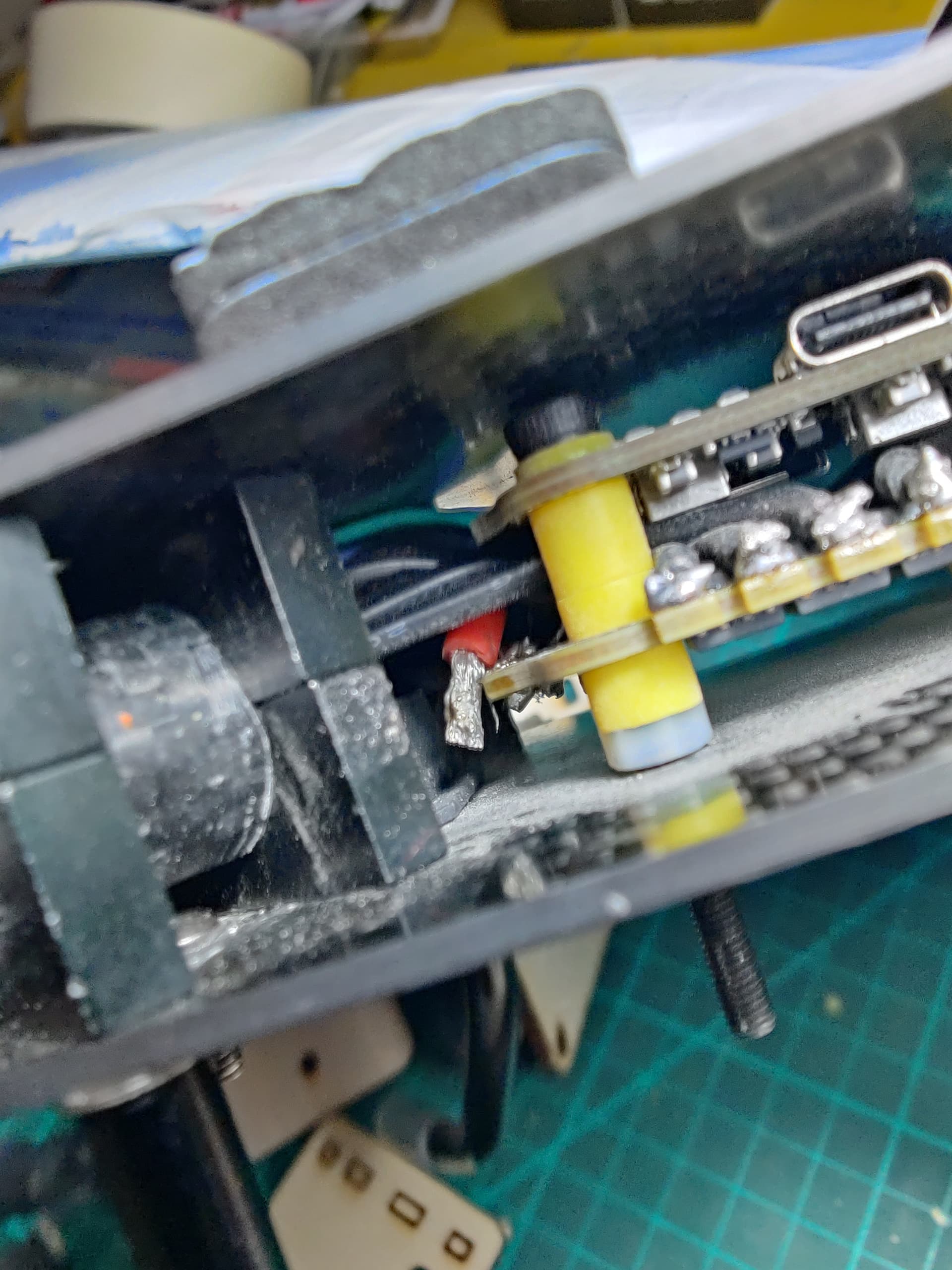
After check why I lost Powe found ESC +VE wire soldering melt and disconnected from ESC. As shown.
Not a topic for this thread but those solder joints in the 2nd photo look suspect.
It was the root cause, solder disconnected from xt60 Female.
Awesome Dave. What was the all-up weight of this quad?
455g with a 4S 1550mah battery on the 4".
Curious to know if you were able to go faster manually in stabilize mode. I’m getting 46 m/s on my 800g 5" quad in stabilize mode.
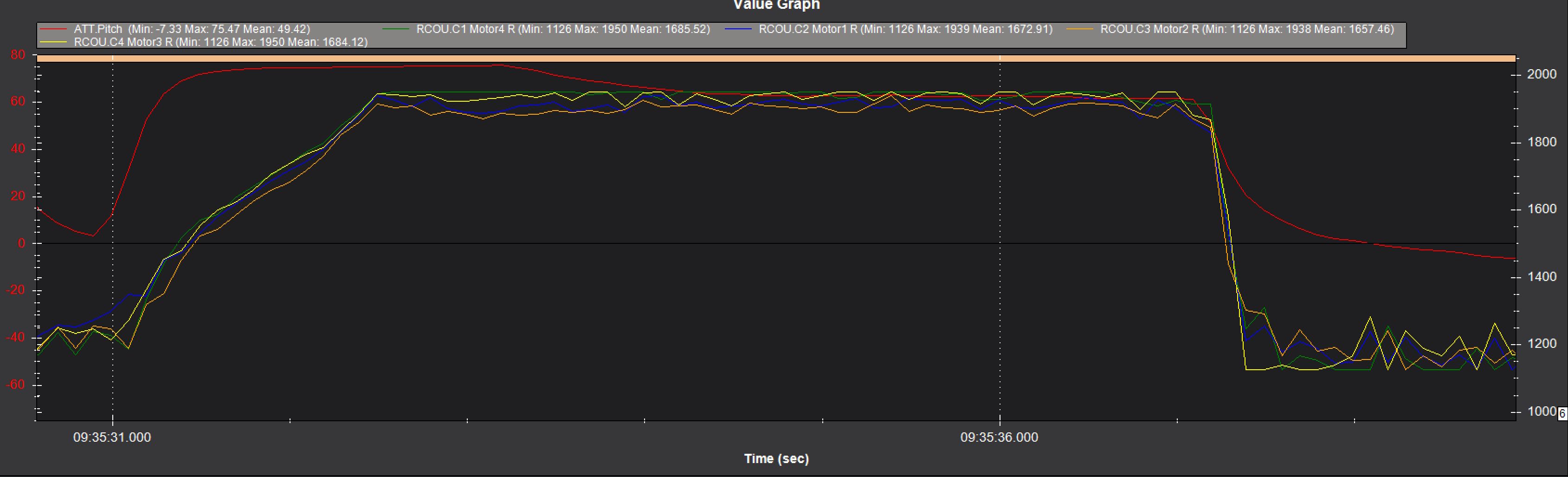
Never tried but doubtful much if any faster. Outputs were pretty much maxed out as it was. If it would I’m sure it would lose altitude.
after replace all motors and propllers and esc to more powerfull sets here is the log file flying in position hold and max angle 72 i reach 38.6 m/s but i think the motor is ok not even become warm but somthing there in the setting hold the high speed can not figure it out. could you please take a look at the log file
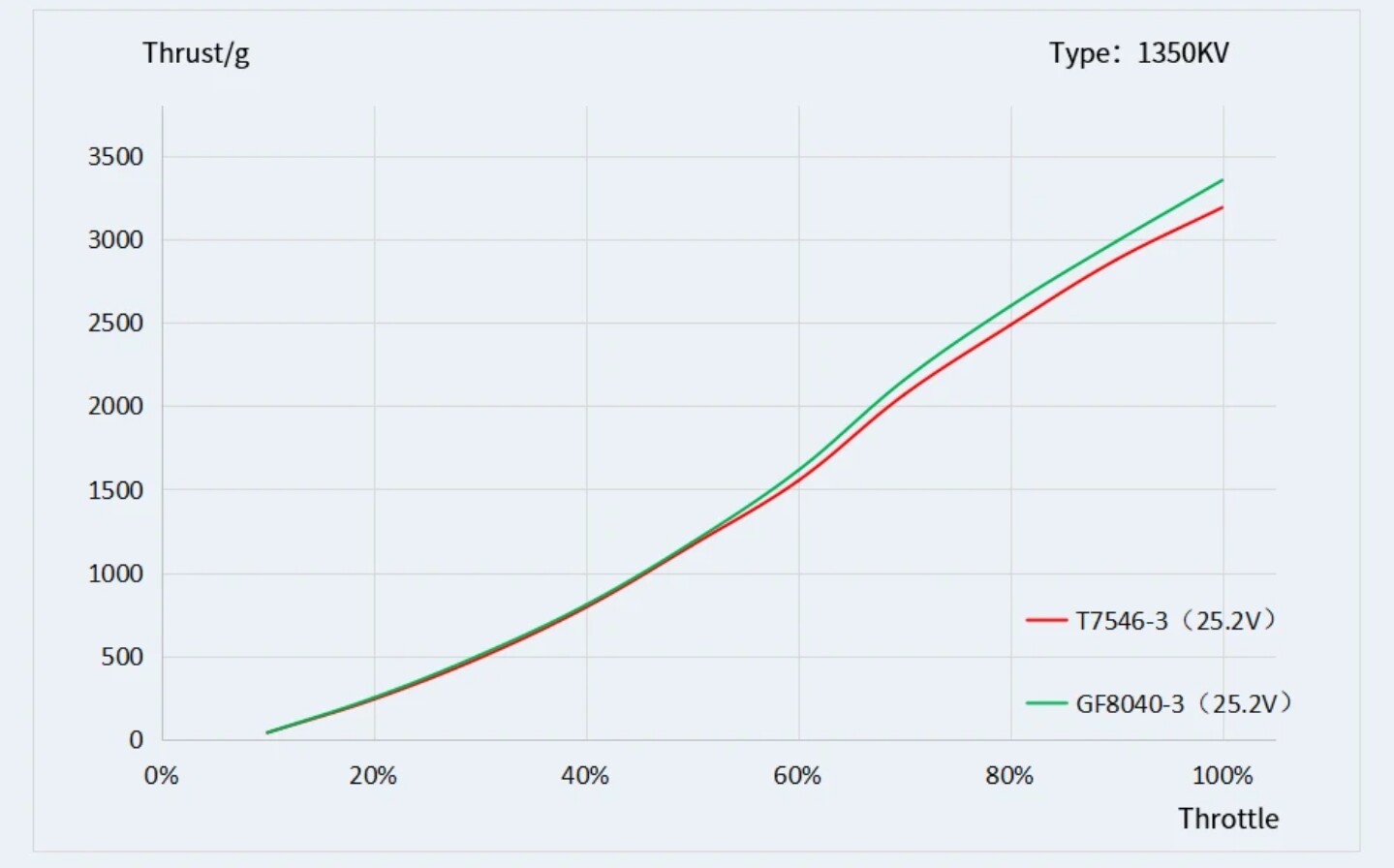
What motors, what props, what battery and what’s the take-off weight with that battery.
And you want to be careful. Vibration compensation is being activated due to GPS or compass glitch. The hazards of flying at a steep angle.
Doubt it will make much of a difference but set the max angle to 80deg and forget about Position Hold mode. Use Loiter and work on the Loiter parameters. You should set your MOT_THST_HOVER value correctly. It’s not 0.2. And take another look at the Motor MIN value.