First I would like to thank the forum for helping me getting this 5in freestyle quad running on ardupilot. On betaflight the quad will run almost 80mph at full throttle but I can barely achieve 45mph with ardupilot.
The goal of this quad is HIGH speed auto missions. So fast speeds in all directions.
I have set the following parameters above the “recommended” ranges and can only achieve about 35m/s.
angle_max: 8000 cdeg
loit_acc_max: 2000 cm/s/s
loit_ang_max: 75deg
loit_speed: 5000 cm/s
psc_angle_max: 0
WPNAV_ACCEL 2000 cm/s/s
WPNAV_SPEED 5000 cm/s
WPNAV_ACCEL_Z 1500 cm/s/s
WPNAV_SPEED_DN 2000 cm/s
WPNAV_SPEED_UP 4000 cm/s
I need more horizontal speed as well as having the quad change altitude while maintaining high speed.
What am i missing?
Should i do a do_change_speed to set the speed at 5000cm/s?
I’m really interested in the results of this. What I know is that in manual modes only acro will get you to very high speed - partly because of angle but also because of part of the achievable thrust is reserved for controlling the vehicle.
What I suggest is you first make sure you can hit 80mph in acro before trying auto modes, at least then you know where the problem is. I have 3" miniquads that do 80mph with AP.
Some of the limits on Auto flying faster are removed in Copter-4.1 so it may be worth trying the beta if you’re happy with the (small-ish) risk of trying a more bleeding edge version. In simulated tests I’ve managed to get a vehicle to lean over to about 60 degrees. It is normally the lean angle that is the limiting factor.
If you try 4.1 and can’t do a lot better send us a log and I will take a look and see if I can make sure the required changes are in 4.1 when it is released.
If you need more than 60 degrees lean angle then you will be limited. I have a fix if you are able to test it. If you could start with the current 4.1 as a starting point I can send you a new firmware with the fix.
Would you be happy to help us with some testing in this area?
Yes we would love to help. My company SparkCognition has been using Ardupilot on drones for 4+ years now and would be happy to help develop this. We are starting to make videos of our projects for a youtube channel. Here is a teaser
I’m impressed with this @Leonardthall@rmackay9 !! 5" with a Pixracer with 4.2.0-Dev. ~53° for a very steady 26 m/s. I suppose it could do a bit more. Plenty of reserve thrust. At what angle will stability get wonky?
Note: I noticed that WP Speed on the Tune channel 6 isn’t working. The speed changes were done with a DO command.
I have an aircraft that will happily run at a little over 50m/s holding 75 degrees lean angle in auto and guided modes. So with a good tune you can push hard! I think I have all those changes in Master now so I don’t think you have any further restrictions.
Just take the limits off and see how hard it will go
I would just set the lean angle max to something like 75 degrees, auto to 50m/s, acceleration to 10 m/s/s then switch to RTL from about 500m away and 50m up. If you get into trouble switch back to Alt Hold (it will be almost back to you anyway). Auto prioritises height control over speed so you are pretty safe.
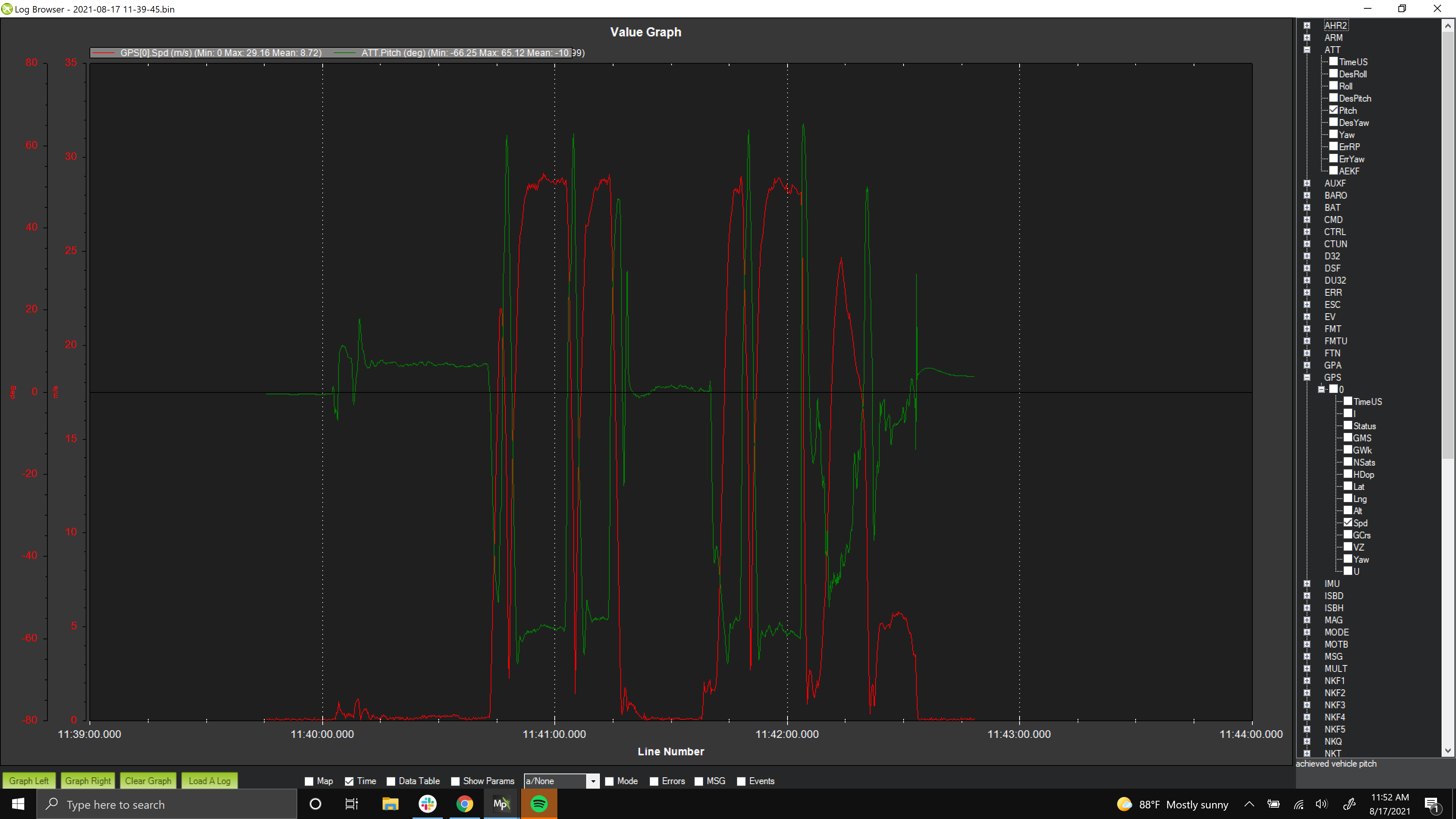
Looking at your log you have a lot more in it. I think you will find the autopilot will handle it fine as long as your power system doesn’t melt
I will turn it up a little bit more. I also want to get the missions to be more “flowy” from waypoint to waypoint, meaning less braking as it comes to a waypoint and a smoother direction change to the next waypoint