Thanks but what is the difference between poshold and Loiter should change max speed?
Should I enable hover learn also?
Thanks but what is the difference between poshold and Loiter should change max speed?
Should I enable hover learn also?
PosHold was replaced by Loiter years ago. There are several parameters that can be configured. Poshold has not much of anything to offer. I’m not suggesting you will achieve higher speed, just practical things that should be done anyway.
No, it won’t learn anything below 0.125. Set is based on a CTUN_Tho at a hover.
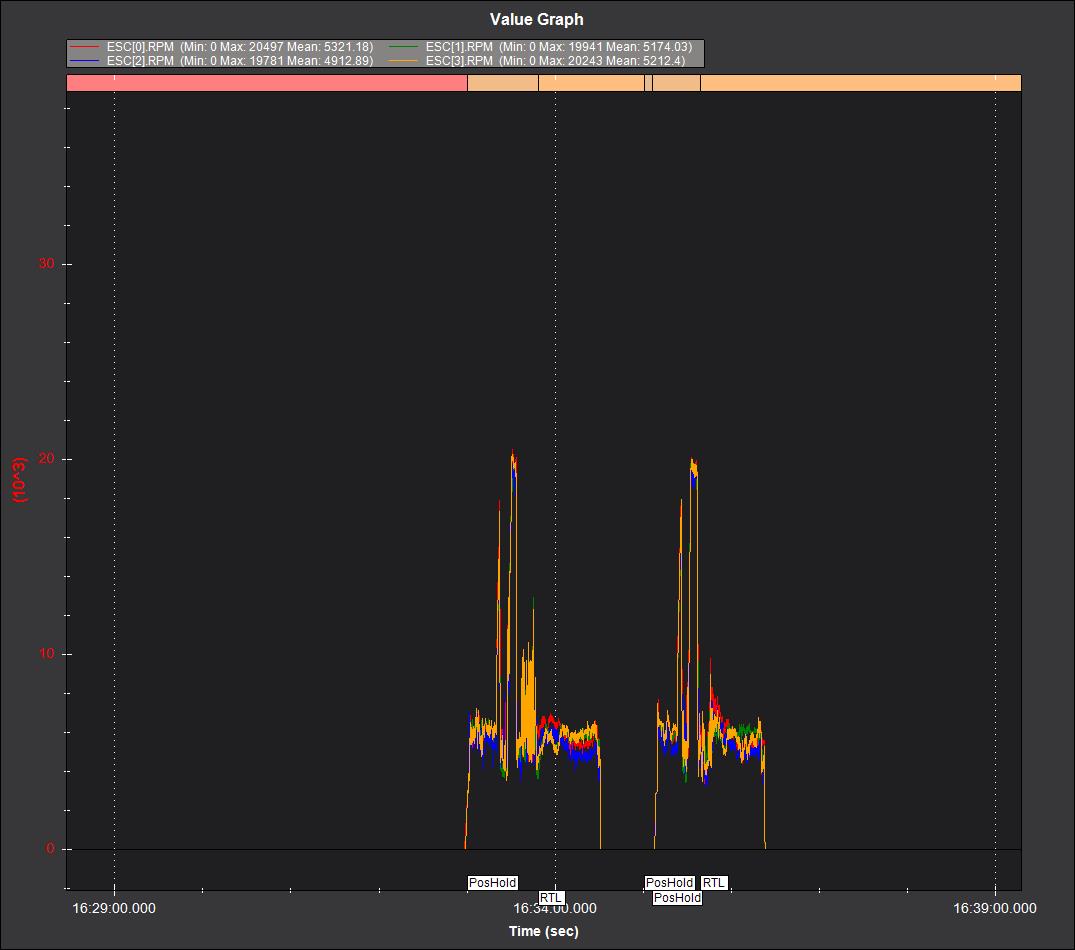
I notice that motor RPM max is 20500 rpm while theoretical is 24v*1350KV= 32000 rpm which is still far.?? any explanation
Set the number of motor poles correctlly so that the eRPM can be correctlly converted to RPM and then Hz.
In this case he has that right as those motors are 12N14P and 14 is default.
it this rpm from esc telemetry ? and what do you think about this data ?
It’s not 24V it’s 20V as the battery sags under load. Graph the battery voltage with ESC RPM and see for yourself.
Try flying in Stabilize also.
And I can’t emphasize enough to avoid a condition that causes Vibration Compensation to trigger. I had a spectacular crash with a 7” at speed from that.
I test with same setting and https://youtu.be/s1wiFPAcut4?si=C-mD7qQgP4ETHPnG increase max angle to 77 and reach 37.6 m/s in windy days and with parachute high drag I fly nice and even gain altitude could you see the video and log file.