I found the problem. When the Jerk limit is much larger than the aircraft is able to achieve we still calculate the time taken assuming that we can acheive that Jerk. So I have added code that calculates the maximum possible Jerk that is achieveable.
Just tested it out. Logs and a short video are in Attempt8. It was “shooting” up in the air, like it should, but then it immediately marked every point as reached.
“try3AndRollPitchTryAt1520.bin” shows the yaw behaviour. It seems to be fixed 
The download link does not appear to be working.
sorry, just tried to reference to the current folder. It is the same link as above. I have edited it.
I just thought about the issue, that every waypoint is reached and I think it is simply the WPNAV_RADIUS that is set to 10000… my points were just 50 meters apart. I will try again.
I have uploaded Attempt9. I have not figured out, why every waypoint is reached immediately after the start. Is that a configuration thing or maybe a bug? I reduced the WPNAV_RADIUS to 200 and the points had enough distance. Even after the mission RTL was not working anymore.
Yeh, it must be a bug but I have not worked out why this is happening yet.
I am having trouble with my compiler here so I am sort of messed up.
1 Like
Hey Guys,
I wanted to thank you for making such a great software. Today I was out in some windy conditions to see how fast my 5" quad could go and I left with a smile in my face 
I’m running 4.1.4 with WPNAV_SPEED on a tuning knob with a maximum set to 45m/s. Maybe there are some parameters which slowed down the run as WP_Radius = 5m running an oval with ~750m length. I’m not sure how MP measures the length, is it just WP to WP or does it take the path while Spline-WP is set?
I really appreciate the work being done 
Cheers Ruediger
Hey Dave is there an updated link to this log. Would be curious to take a look - thanks!
The throttle looked quite low around 25%. Any reason it was kept this low? Seems like there’s lots room to increase this and in turn increase speed
I don’t have those logs any longer unfortunately. The weather is improving so ‘ll be creating more.
1 Like
Hello every one I test my new 7 inch Quadcopter for speed currently I manage to get 130kmh in Altitude hold mode with max lean angle of 55 and I check throttle out reach 1800 at that speed, Does this mean I can increase lean angle which lead to higher speed?
Yes, you should be able to go to 55 degrees maximum lean angle. For best results you should set your PSC_VELXY_FF.
Thanks for your fast reply, my question is I need to go more to reach high speed like 160kmh is it possible? ![]()
![]()
Increase your maximum lean angle to 70 degrees and test again in Alt_Hold.
This is a good opportunity to get back to that question. In a previous post in this thread you based the FF on Mean Velocity/Mean acceleration and on the 4" I was running at the time it was helpful. This is an Auto Run just to collect some data before I start speeding things up on a 7". Would this apply here?
one thing in my previous test flight i loose altitude once reach high speed value , Barometer was not covered , i cover it now for next test any other action can i make not to loose altitude
this value is curranty zero !!
here is the new adjustments
ANGLE_MAX=6500
PSC_VELXY_FF = 0.2
EK#_ALT_M_NSE=2.7
i have three props size 8040 , 7043 and 7056 i plan to use 8040 first.
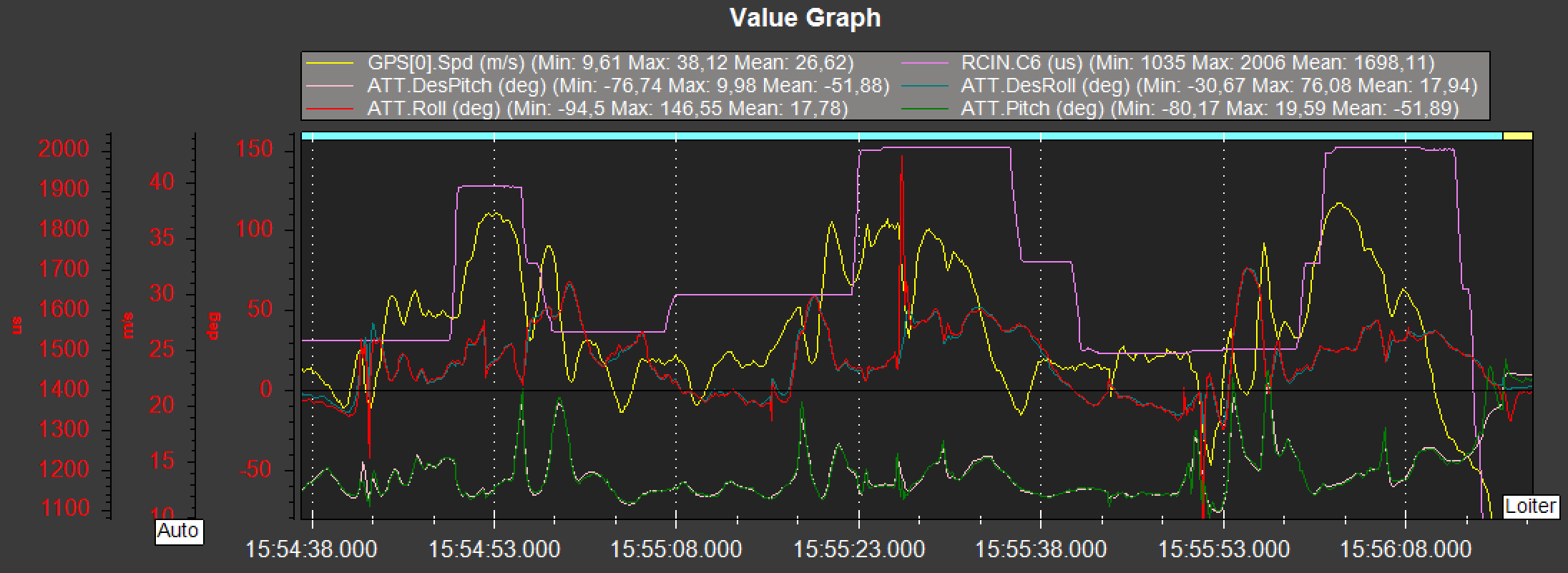
Last two flights
I can’t set angle_max more than 65 prearm angle_max alarm prevent flying I paly with arming_option to fly it flying sluggish without any control and crashed. ![]()
![]()
![]() And I discovered I make a trouble mistake setting angle max to 75 not 7500 which make that horrible behavior
And I discovered I make a trouble mistake setting angle max to 75 not 7500 which make that horrible behavior ![]()
![]()
![]()
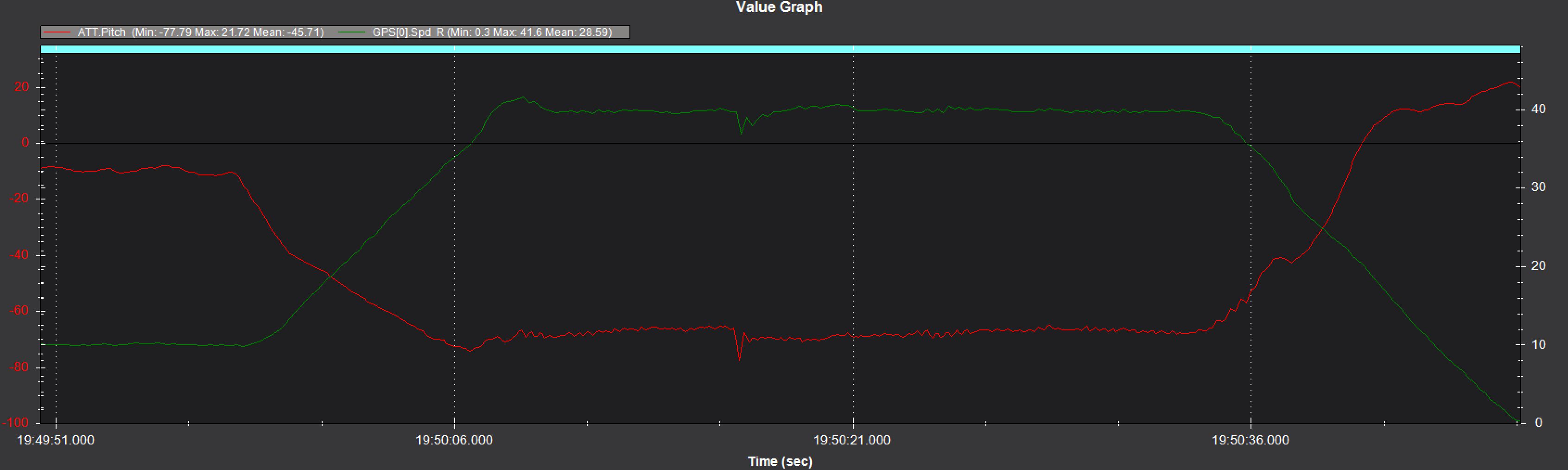
![]() but the results prior to that mistake was nice I reach 145 kmh on 6500 max angle which is the good new still losing altitude but not like before.
but the results prior to that mistake was nice I reach 145 kmh on 6500 max angle which is the good new still losing altitude but not like before.