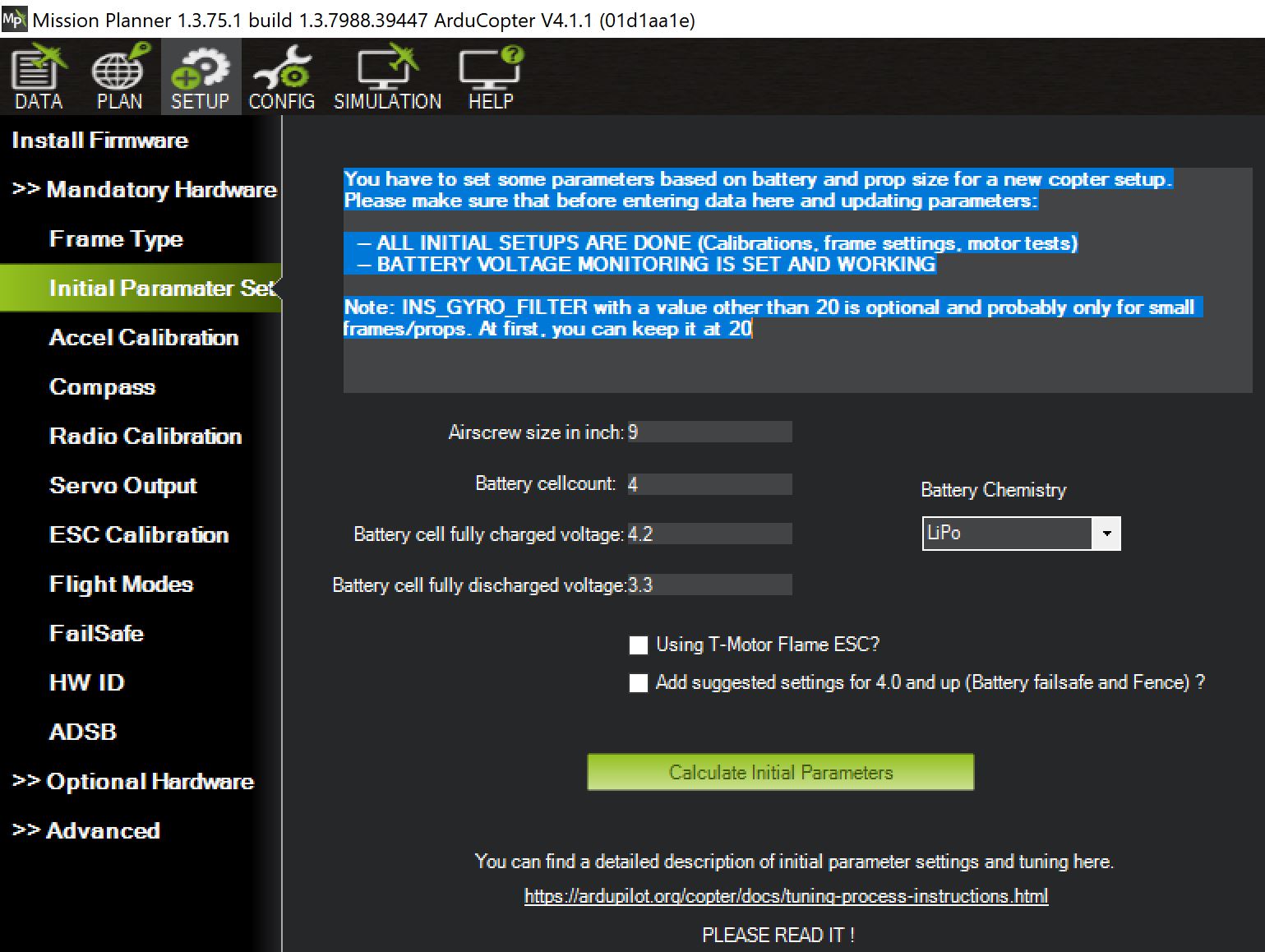
The tune isn’t that great. Start by updating to latest Stable V4.1.1. Then run Mission Planners Alt>A tuning plug-in because you do not have some Initial Tuning Parameters set. Clearly you have done some tuning but these may help. Then configure the Dynamic Notch Filter. Then tune again or run Auto Tune.
Connect the FC to Mission Planner and hit the Alt>A keys which will bring up the plug-in with prompts for prop size and battery power. Answer them and the suggested parameters will be produced. Make those changes. For your craft the significant parameters will be the rate filters, the Gyro filter and Motor Thrust scaling. You can drop the INS_ACCEL_FILTER to 10Hz also.
Yes, this replaces the plug-in with a native Setup Tab. You want to update to the latest MP Beta often anyway to keep of with new features added to Ardupilot.
Can be found here:
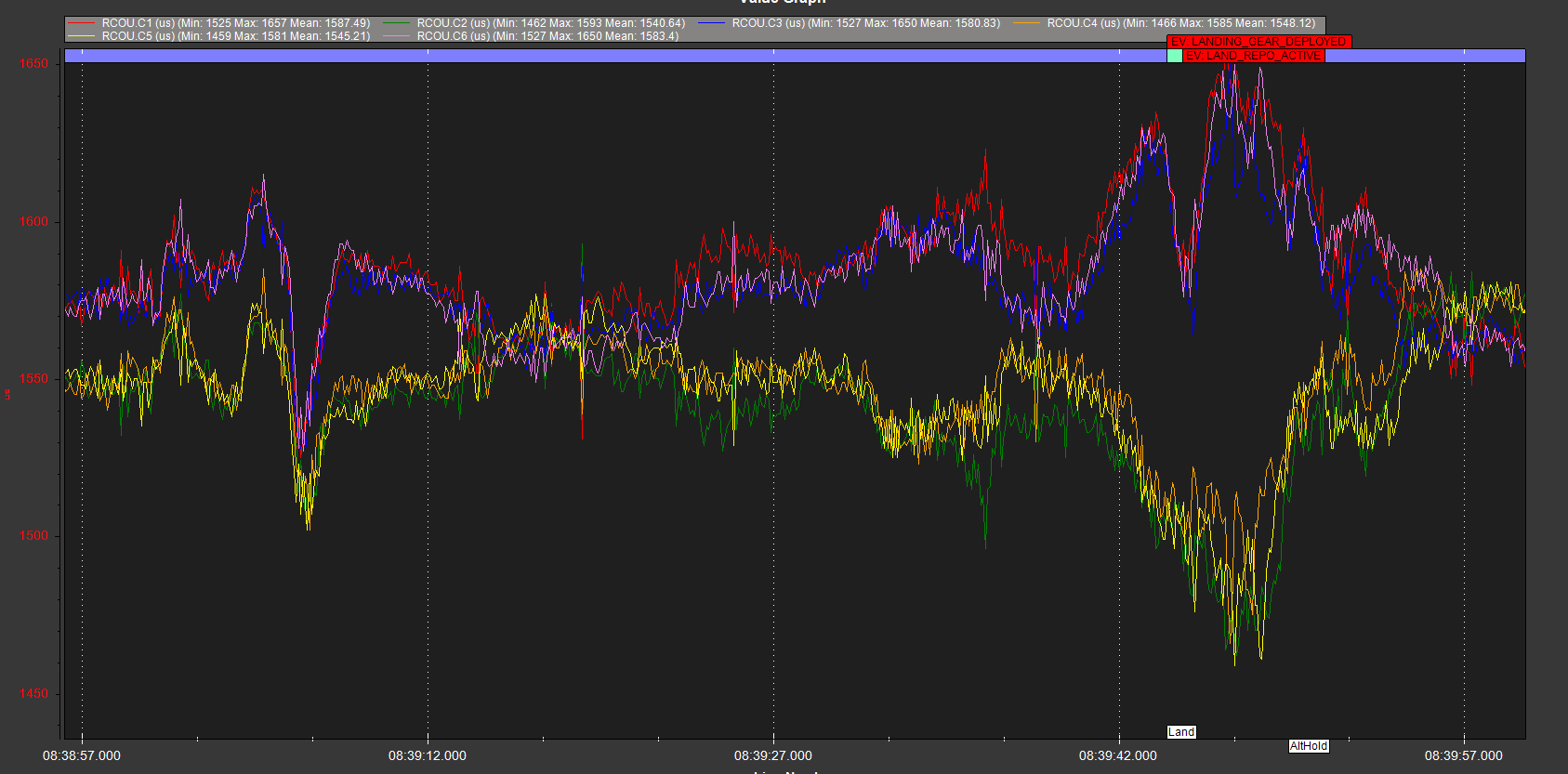
Motors 1, 3 and 6 are working harder to counteract 2, 4 and 5 (or one of those) - probably motor mounts are twisted on the arms slightly. See if you can fix that, then run another Autotune.
Hey Shawn much appreciated for looking over my log. Thank you will try that out.
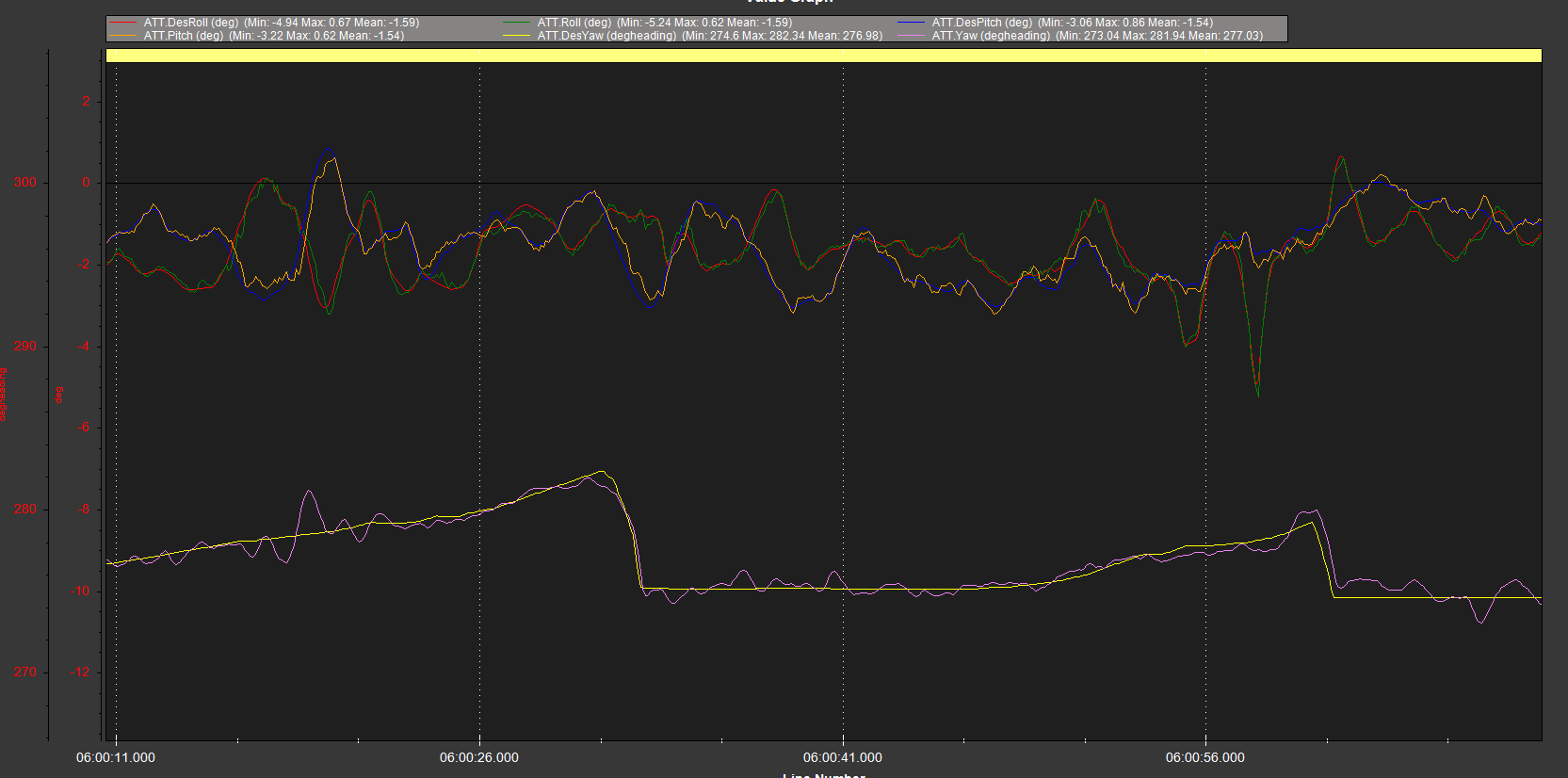
" You’ve got some physical yaw bias happening"
What do you mean by this?
“Motors 1, 3 and 6 are working harder to counteract 2, 4 and 5 (or one of those) - probably motor mounts are twisted on the arms slightly. See if you can fix that, then run another Autotune.”
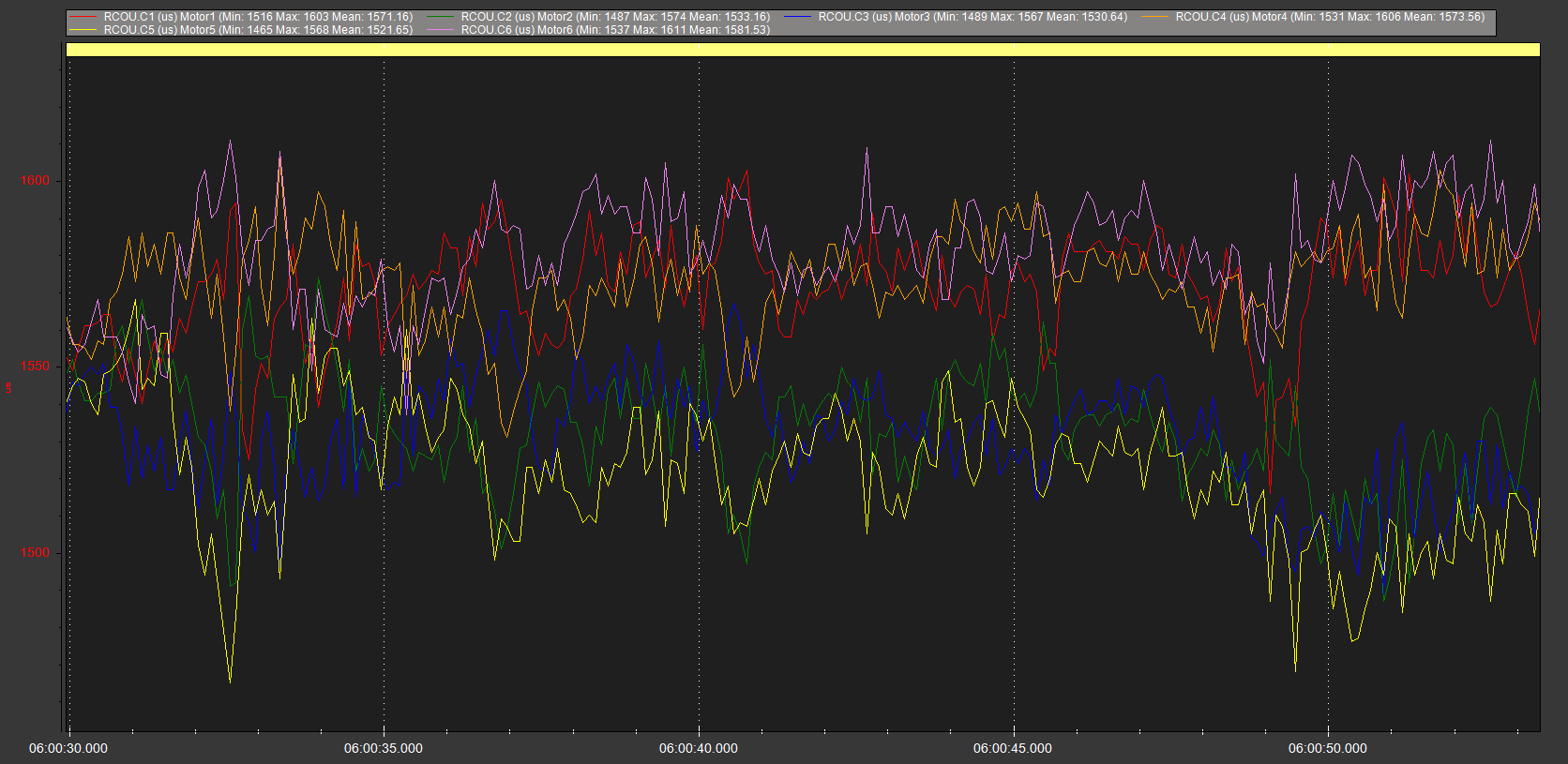
Will definitely check the mounts. How can you tell that some motors are working harder from the chart?
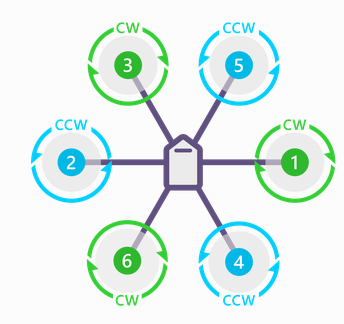
See in that graph that the red, blue and purple lines are higher in the RCout PWM scale. If you check the motor order diagrams you’ll see for Hexacopter that 1, 3 and 6 are Counter-Clockwise, and they are working a bit harder that 2, 4 and 5 because one (or more) of the those clockwise motors must be tilted slightly producing thrust that is not exactly vertical. Of course all yaw comes from motor torque, so any misaligned thrust easily interferes with the yaw derived from torque. The extra PWM required to keep yaw under control also detracts from pitch/roll stability, up to a point. Eventually pitch and roll will take priority once yaw has reached it’s preset limit (MOT_YAW_HEADROOM,200) and you will start to lose yaw control then.
This can also make tuning harder and Autotune or manual tuning can never produce ideal results with that physical yaw bias interfering.
Change INS_ACCEL_FILTER,10 to INS_ACCEL_FILTER,20
then follow through the rest here in order:
Without the voltage monitoring (at least) you are missing out on the advantages of
MOT_BAT_VOLT_* parameters and the battery voltage failsafe parameters.
The current monitoring is also extremely handy for diagnosis and battery capacity monitoring.
It’s virtually mandatory when you’ve got a battery powered device up in the air.
You can set
ATC_THR_MIX_MAN,0.5
PSC_ACCZ_I,0.58
PSC_ACCZ_P,0.29
These wont fix the wobbliness but are just tying off a couple of loose ends.
Make sure all the wiring is cleaned up and not vibrating or flapping around in the prop wash.
Finally you need to run Autotune on each axis, after setting up the voltage and current monitoring. That should clean up the slightly noisy attitude control, and the noisy motor outputs because of the attitude control.