This an the email I received from a few months ago…
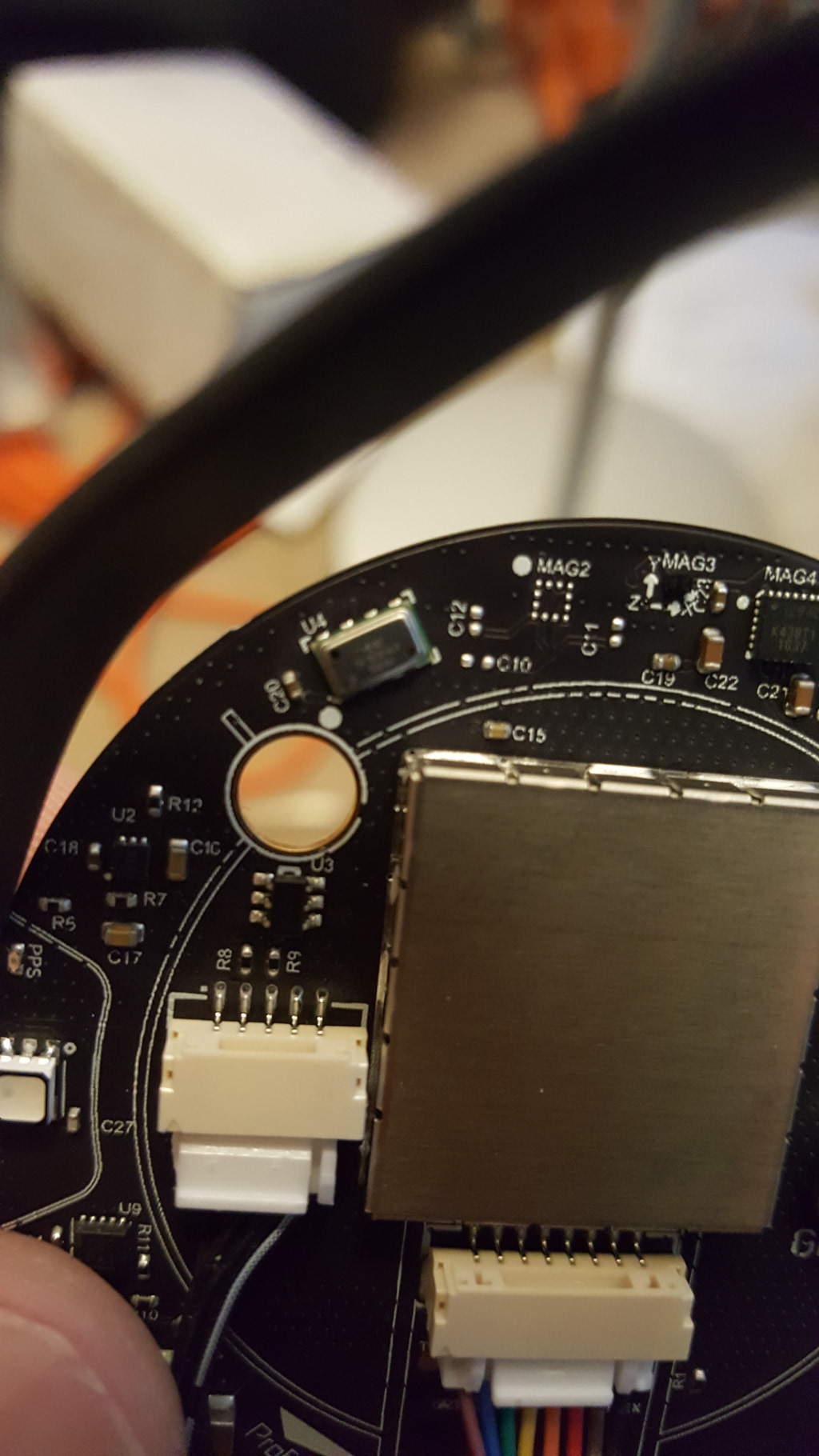
"…If you open up the HERE+ puck you will see two connectors, the large one that goes to the autopilot, and a smaller one for the USB cable.
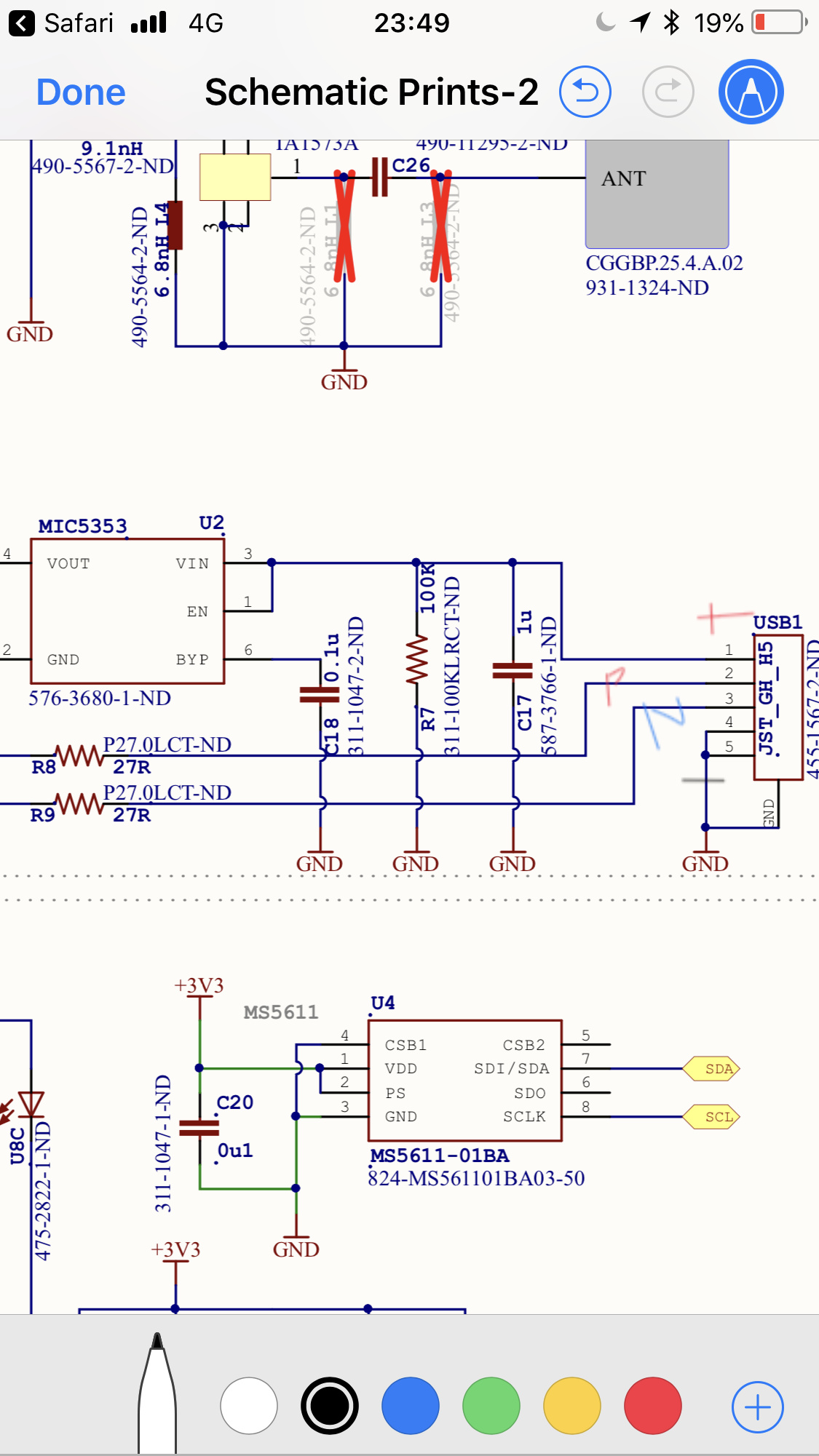
The individual pads of the USB connector are labeled, so you should be able to get the pinout that way. USB requires 4 connections, 5V, Ground, D+, and D-. If you are cutting up a USB cable, generally 5V is Red, GND is Black, D+ is White, and D- is Green.
Pin 1 on a JST-GH Connector is on the left When you hold the connector such that the locking connector is facing up (It is red on the cables that come with the Pixhawk 2)
The pinout is the following:
+5V
D+
D-
GND
Shield (Optional)
Good Luck!"
I never ended up getting my own wiring to work, but when they supplied me with a cable, it worked great thanks to @David_SpektreWorks.
The connector inside is not labeled, at least not in my unit.
Reached out to 3dxr and they offered to send a cable. Will wait and see when that one arrives.
Thanks guys
If we created a cable for the main port of the GPS from the GPS 1 cable that was connected the RX, TX, ground and power to an FTDI cable, should that work to upgrade the firmware?
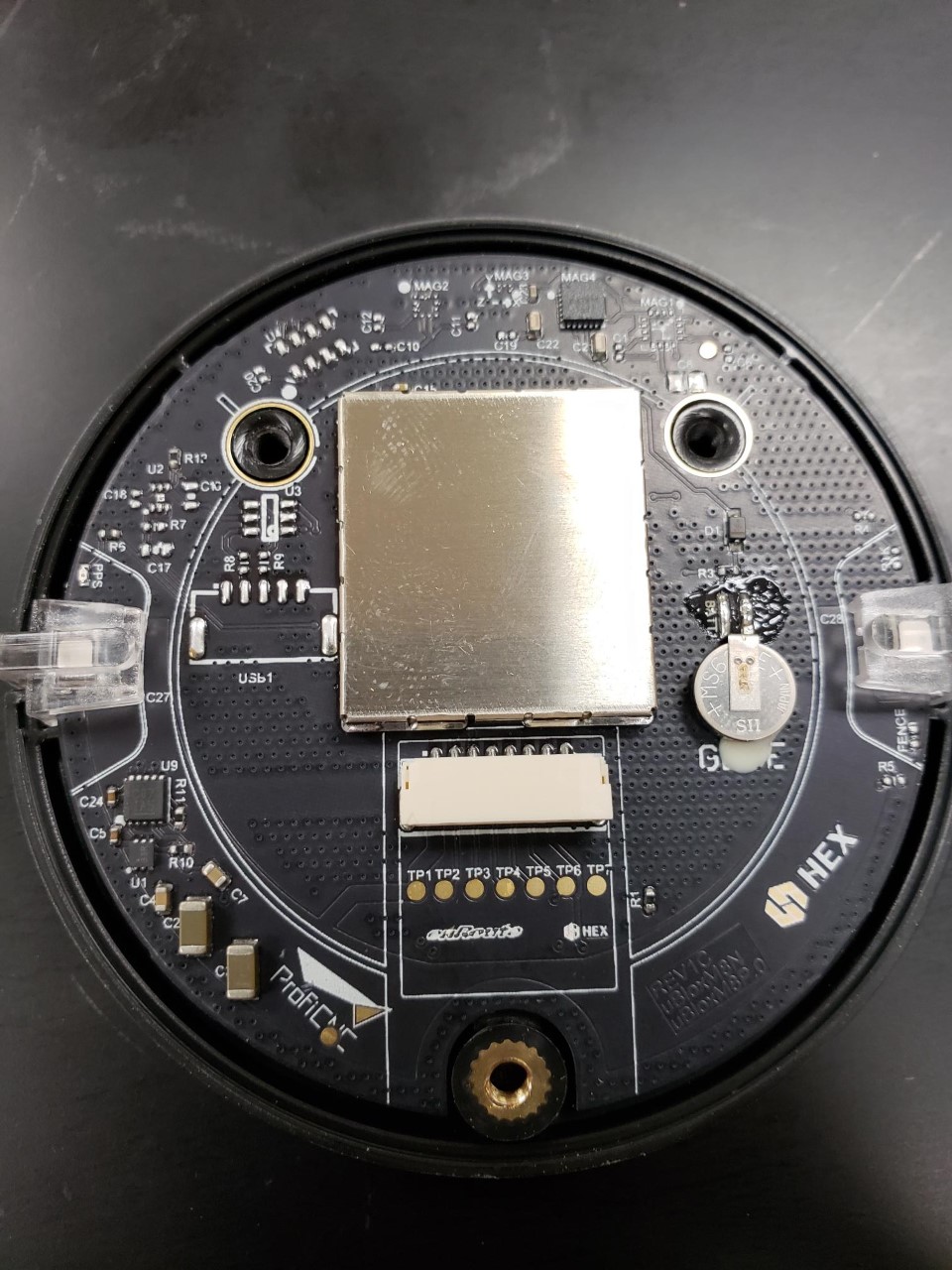
No; the connector on the GPS board that you need to use is not the main large connector. It is an auxiliary port hidden inside the case of the HERE+. You need to remove the board from the case to update the firmware.
I just assumed the other plug was +5V, Ground, D+ (RX or TX?) and D- (RX or TX?) as well based on your description of the cable above. Does the second connector need to use an FTDI cable then or will a generic USB cable work?
OK, my assumptions are probably wrong about the connections. I just assumed they were the same, but now I realize that they different. It’d been nice if the auxiliary port was a micro-usb instead since it appears to really just be a USB port.
@Naterater, would you take a picture of your cable or diagram how the cable is wired? Does your USB cable power the GPS as well or do you have to power it with the cable from the Pixhawk? (The instructions for firmware update mentioned having to power it with the Pixhawk.) I tried wiring it, but I’m not getting power and it doesn’t show up as a COM port even if I power it using the Pixhawk. Either my wiring is wrong or I need to use the FTDI cable. @David_SpektreWorks? @proficnc?
@proficnc I hooked up the USB green wire to 2 and white wire to 3, but the USB device does not show up. (I didn’t connect ground and power since its being powered by the Pixhawk connection.) Should that work?
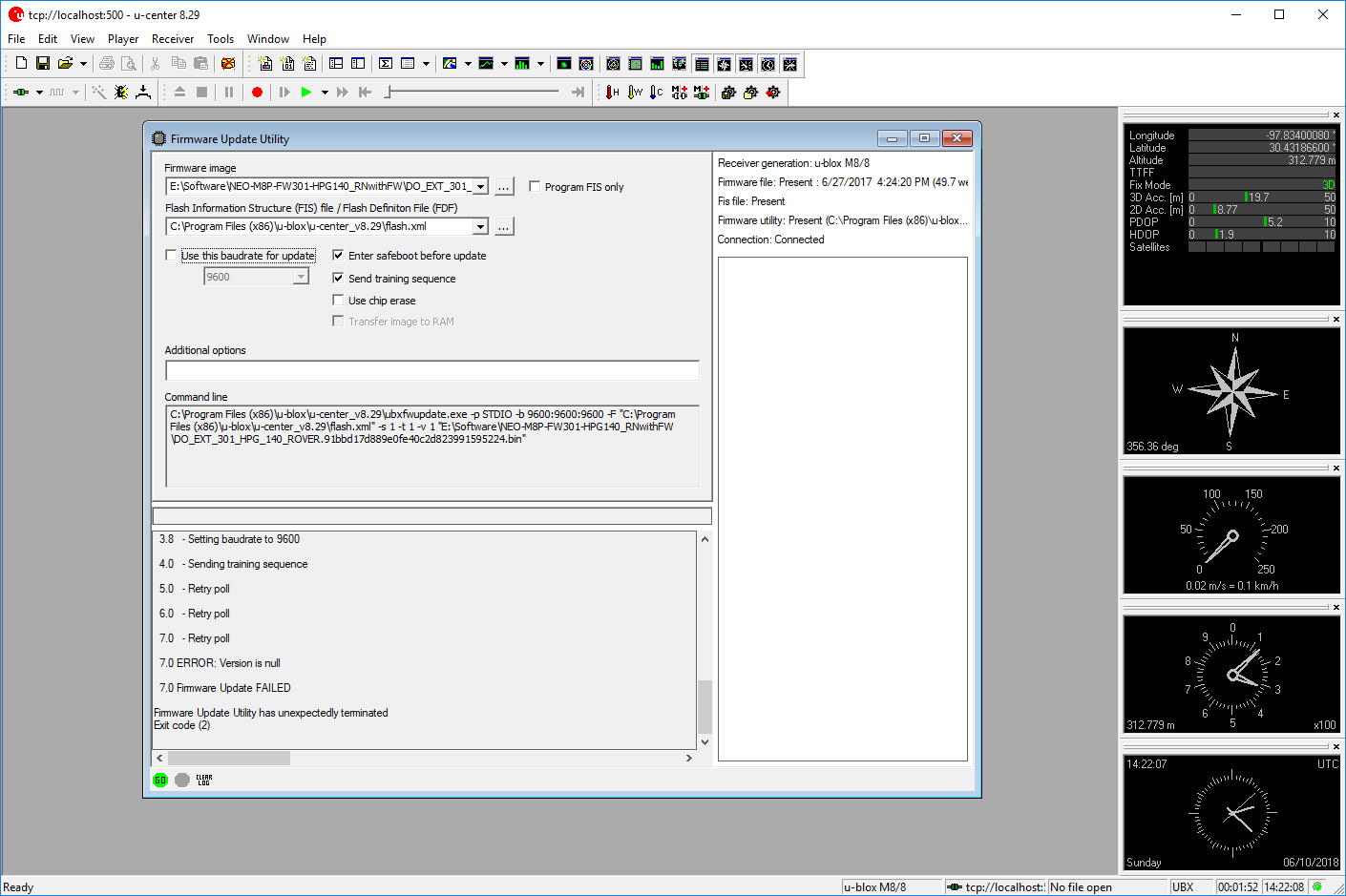
FYI, this is the error I get when I attempt to upgrade the firmware using the Serial Port GPS passthrough:
0.0 Updating Firmware ‘E:\Software\NEO-M8P-FW301-HPG140_RNwithFW\DO_EXT_301_HPG_140_ROVER.91bbd17d889e0fe40c2d823991595224.bin’ of receiver over 'STDIO’
0.0 - Opening and buffering image file
0.1 - Verifying image
0.1 Image (file size 502984) for u-blox8 accepted
0.1 Image Ver '3.01 (db0c89)'
0.1 - CRC= 0x90A98096 0xFDD8261E
0.1 - Trying to open port STDIO
0.1 - Setting baudrate to 9600
0.3 - Sending training sequence
0.7 - Received Version information
0.7 - Receiver currently running SW ‘EXT CORE 3.01 (d080e3)’
0.7 - Receiver HW ‘00080000’, Generation 8.0
0.7 - Sending ROM CRC-Mix-Read
2.0 ROM CRC: 0xA15AF099
2.0 u-blox8 ROM2.01 hardware detected (0xA15AF099)
2.0 Getting Port connection to receiver
2.3 - Connected port is: UART1
2.3 Commanding Safeboot
2.8 - Re-enumerating…
3.8 - Setting baudrate to 9600
4.1 - Sending training sequence
5.1 - Retry poll
6.1 - Retry poll
7.1 - Retry poll
7.1 ERROR: Version is null
7.1 Firmware Update FAILED
Firmware Update Utility has unexpectedly terminated
I got my USB cable working finally. I just cut apart a regular USB cable and wired it to the serial cable using this setup. (I had to cut down a 6 pin cable to a 5 pin since I didn’t have any 5 pin cables.) I thought I had installed the VCP driver for the u-blox GPS already, but I hadn’t. The GPS showed up in the device list as soon as I installed the driver. Thanks to @proficnc and @Naterater for the help!
Hello Everyone, I wanted to update the firmware of my here+ ground module. I opened up the module only to find out that there is no USB port attached. I am surprised that no one has experienced the same . Should i point out this as a defect to the manufactures .?
And what is the solution for this.?
Thanks in advance
the answer to this is the baudrate must be set to the same as it is configured in ardupilot. ie if the autopilot has it as 57600, then the ublox config tool needs to be set to 57600 as well