First of all, please allow me to apologise for thread if it is in wrong location, but this a bit confusing to me and I can’t seem to find my way around here.
Now. I am in process of building my own RTK Mower, amd currently I am fixing my RC setup first. and have the rest of the year to make it autonomous.
Hardware Setup:
Wheelchair motors 250W 116 RPM 12-24V
Battery Lifepo4 12V100Ah with bms and BT
Motor controler is MDDS30 Cytron
3x DC12V 895 Motors for blades - cutting width around 600mm
10 inch wheels which will be connected left and right side separately.
GPS/RTK - Hex/ProfiCNC - Cube Orange (Pixhawk 2.1) with ADS-B Carrier Board ? This is just my best option for now.
Questions I really need help with:
Does somebody have an idea or information about path generator which can work very similar or even the same as Open Mower application.
What would be the best way of locating hardware to have. I have seen this video where it is explained very simply, and this is where I found out about ArduPilot. But making lines on the map is way more complicated then in Open Mower system. Video: DIY Autonomous GPS Mower - Parts List, Schematics, Build Details - YouTube
I’m almost certain that @ktrussell no longer uses or supports the path planner he made a few years ago in favor of Mission Planner’s built in “survey grid” features.
Mission Planner already contains path generation that can be used very successfully for mowing, though it does have some limitations.
The workflow in this demo video has been included in Mission Planner for about a year now.
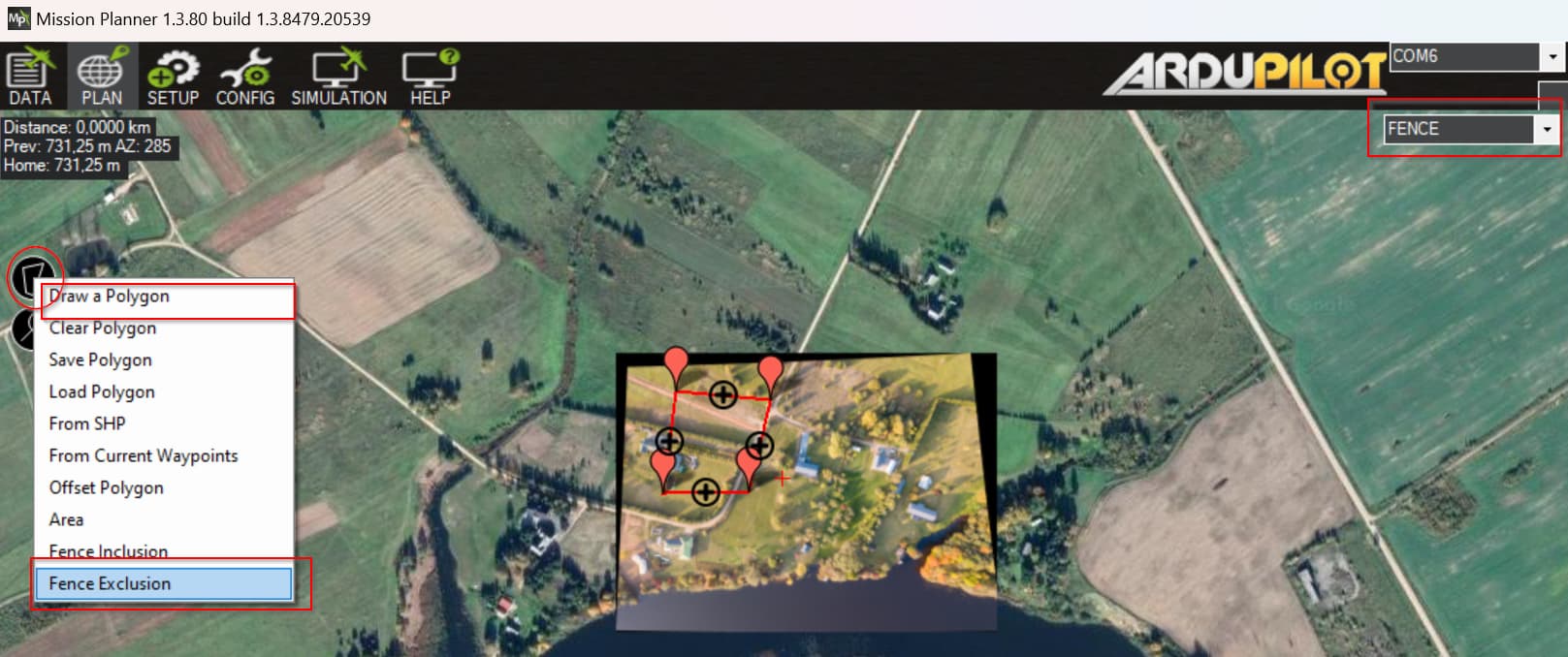
In FENCE planning mode: Draw a Polygon → select Fence Exclusion from the menu (polygon drawing icon). It will turn that polygon into the obstacle polygon
Have you had any luck getting the best from the S-Curves? My field is somewhat similar to yours: it’s not rectangular, number of obstacles, hence numerous of turns with the Survey pattern and this not only significantly increases the mowing time, damages the turf and etc. When I am cutting it manually, most of the lines aren’t even close to being straight and mostly look like arches or spirals.
I am also anxious using other than 4.1.0-dev ArduRover, since there were some compatibility issues with ArduSimple GPSes in the later versions (a year ago), but maybe those issues are gone now?
I am using stable 4.2.3 (which as I understand it doesn’t have s-curves). I use pivot turns for any turn >30 degrees. I tried s-curves (in later versions) and made several attempts at tuning per the instructions and didn’t get it to work very well. Could be user error of course. I do have ardusimple+heading (i.e. the mother/daugherboard config) working for gps-yaw and also for precise location; my hardware is Pixhawk 4. When I attempted upgrading to Pixhawk 6c it didn’t work. Eventually (when I build more mowers) I expect I will have to move to dual receivers (i.e. not the ardusimple mother/daughterboard config) but I haven’t gotten around to that yet.
I’d recommend holding off on using 4.3+ (position controller + S-Curves) for now. There are obvious flaws, and the dev team is working to resolve them.
However, I HIGHLY recommend updating to 4.2.3, which has substantial improvements over a legacy 4.1-dev build. There are no lingering uBlox GPS issues.
Hi Marko,
I’m not sure how I have missed your messages on other platforms, but I apologize. After I wrote the quite rudimentary, but effective programs for “spiral” path planning, Michael Oborne built a spiral into Mission Planner that is superior in several ways. As @Yuri_Rage indicated, I rarely use my command line based programs anymore.
Chris, since you had implemented the idea of building an electric mower (I had this idea for a long time as well) would like to know your opinion. Knowing that optimal path planning becomes more crucial for the big heavy lawn mower, would it be less troublesome with a smaller lighter mower? Less grass rips, less damage if something goes out of control, less noise, less ground packing. Likely that would come with the increased mowing time, but maybe this would not be that noticeable if smaller mower needs less attendance.
Trying to find the silver lining between the mower size and efficiency for big fields. Is it really worth going big?
Depends on what you mean by “worth”. I and my team are energized and drawn forward by the challenge of building a practical zero-emission lawn mowing service. Our operational model has 1 operator with truck&trailer deploying 4 mowers while doing the edge trimming and mowing 4-8 acres/hour. We are targeting 2-3 visits/day of 5-20 acres/visit. For the machines, we targeted 8-10 hours of runtime using 50-volt electronics (which are much more available and cheaper than, say, 100v electronics) and ended up with a three-blade, 54" deck powered by a 22kwh pack that will run a mower 8-10 hours.
Efficiency goes up as mower width goes up because of the fixed strip overlap. (Strip overlap doesn’t depend on the size of your mower, it depends on your navigational accuracy). A 3" overlap wastes 15% on a 20" mower but only 5% on a 54" mower. We saw significant efficiency improvements moving from our v1 (2-blade 42") to our v2 (54") mower.
Chris, from your business service perspective, this design makes sense, efficiency and speed is crucial there.
Whereas I was looking into it as a home owner using it for my own purposes only. Would I use fast, loud and efficient or quiet, but slow and safer? Not to mention the build cost. Starting to lean to the later option.
Yes, that would be yet another robotic lawn mower, but made for the big areas, and hopefully for the fraction of the price of the commercial ones (e.g. Ambrogio L400i Basic - 15.000 USD)
I was off for some time but I appreciate your engagement. I had to move to other things but I back on track now.
Here are some videos of rough hardware testing. I will use belt tensioners to fix the belt loosening. I will reactivate questions here and maybe some in private, but I do want to a similar system Chris Milner stated, but for my own use.