Hi all,
I am new to this ardupilot situation and i have run into some issues.
Firstly, i am using mission planner 1.3.79 and i am not able to calibrate the compass. I am using a ‘Matek F405-WTE’ flight controller (the one with the expresslrs receiver built in) and a matek ‘GNSS & compass M10-5883’. Each time i try, i move the compass around as instructed but once i get to 100%, the green bar resumes to 0% and i have to start over again and this happens continuously.
Secondly, when i try to calibrate the radio in mission planner, nothing is happening when i move the sticks on my radio. I have also noticed that in the ‘Data’ tab of mission planner, it says it has failsafed but the LED on both the Tx and Rx are solid indicating that they are bound so i’m really lost. For the radio setup, I am using an axisflying Thor TX pro with the latest version of ELRS (3.1.2) and on the receiver side, i am using the built in ELRS receiver which i have also flashed with the latest version of ELRS (3.1.2).
Any help would be much appreciated. This is the first time i am playing around with ardupilot.
Thanks again for any help ![]()
Try to calibrate the compass outside with a good GPS lock. Also, is the GPS/Compass module installed into the plane with the flight controller? Because both the FC and GPS/Compass need to be moving together when you do the calibration.
Sorry, can’t offer any advice on the ELRS. But I’m sure somebody else can.
Thank you for the suggestion!!! i have not installed the FC and GPS into the aircraft yet and i had not realised that i had to move both of them together. i tried callibrating it again whilst moving them both together and it WORKED!!! thank you so much!
I haven’t used the built in ELRS RX on the WTE, but I did hear about some issues with some ELRS receivers from Matek having temperature related issues, which you might want to look into before you fly the aircraft. I use a lot a Matek gear, so don’t get me wrong, I like their stuff, but I’m being careful with their ELRS RXs. See here (https://www.reddit.com/r/ExpressLRS/comments/wcuao4/avoid_matek_elrs_rxs/)
More likely if you’re just doing bench setup though, you won’t be running into the other issues. I really like how Matek posts the “Ardupilot Mapping” tab on their products that support Ardupilot, and for this board they specifically have an extra tab for the built in ELRS RX http://www.mateksys.com/?portfolio=f405-wte#tab-id-5
Hopefully the instructions in the first section of that tab get you sorted out and working. There are a few parameters you have to change from “default”.
I actually have this same flight controller but am not using the built in RX, so it’d be great to hear how it goes for you and if you find out any more helpful info on this RX. You should also look into the “yappu script” for use with ELRS and Ardupilot. I’ve seen some pretty cool things done with it on Crossfire and ELRS but have yet to try it myself.
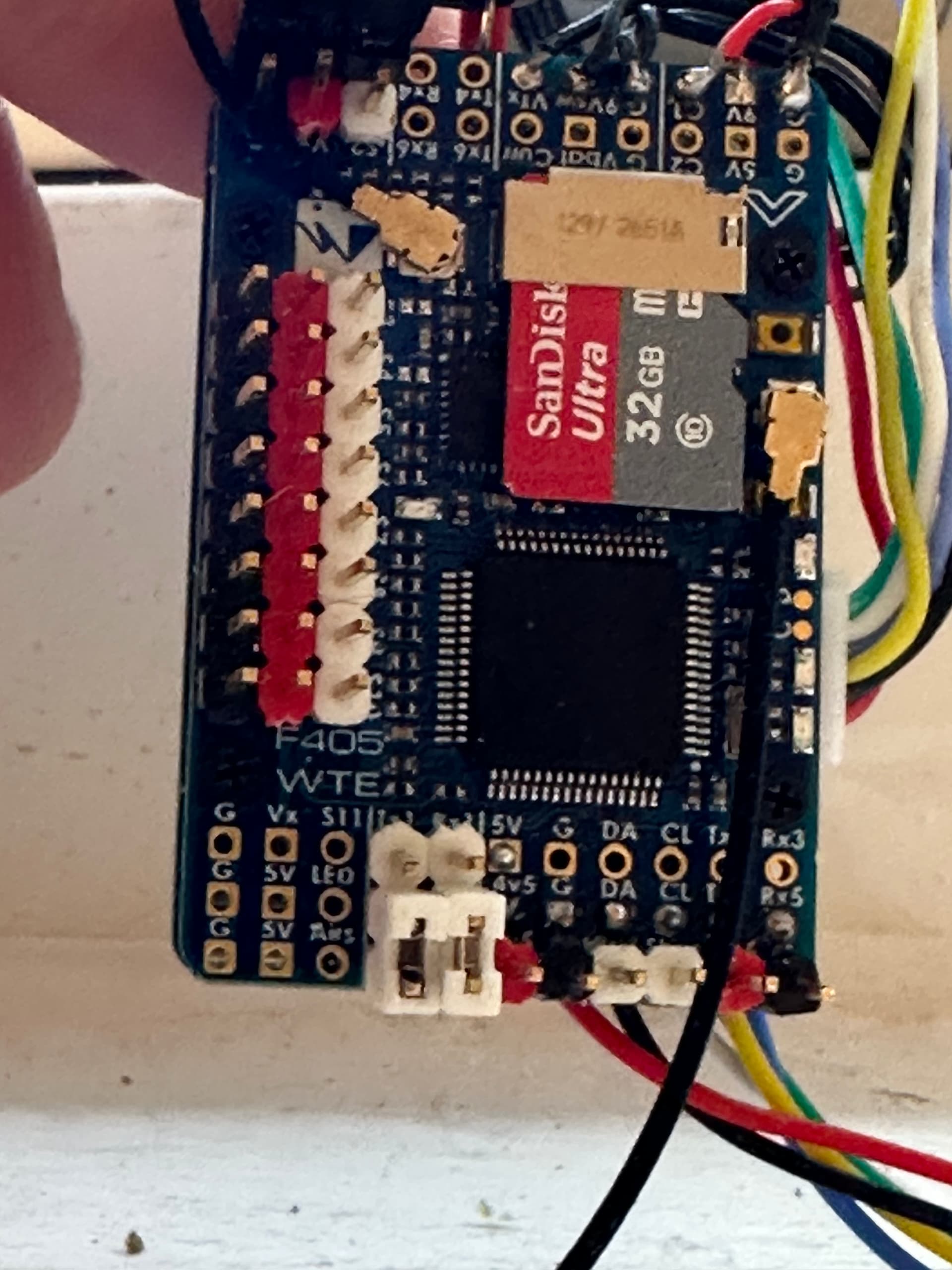
Please show your jumper settings for Tx1/Rx1, ERx/ETx and Tx2/Rx2. and upload your parameters here.
thank you for the help. I think i may have figured out the issue. Stupidly, i was under the impression that the Matek F405-WTE could do both Mavlink and expresslrs but i now realise you must choose between either mavlink or expresslrs. I was initially confused by the wiring diagrams on matek’s website for the FC but i now understand that you have to choose between the two and i have now wired up my FC to do mavlink.
Thanks for all the help anyways!!!
Have you established a wifi connection?
Yes, sorry, I have worked out all the problems I was having. I thought I had deleted that last query once I had figured it out but it doesn’t seem to have worked. Anyways, thanks for all the help!
Hi Emanuel4619,
I have the exact same problem. Everything seams to work fine except from the fact that I can not connect the F405-WTE to the onboard RX. The hardware connection is done but even though I have programmed the ArduPilot params (according to Flight Controller F405-WTE – Matek Systems) the connection remains dead as a rock.
Also, I have a good connection between RX and TX. All rx-related telemetry is showing ut in transmitter but none from the FC. Just as I can see all FC related info in Mission Planner but have no stick input.
I’m close to a nervous breakdown :-o - could you please help? What did you do to make it work?
TIA!
Please show your jumper settings for Tx1/Rx1, ERx/ETx and Tx2/Rx2. and upload your parameters here.
Mission Planner / Config / Full Parameter List / Save to File
F405_WTE full list.param (18.8 KB)
I am not quite sure, but set RC_PROTOCOLS = 1 (All).
If that doesn’t work, I’ll have to look at my hardware later.
Which ELRS version did you flash?
Thank you for your time and effort!
Setting RC_PROTOCOL to 1 didn’t help. I had it set to only CRSF but changed it to 1 to try.
It would be great to have a look at your params as well.
I’ve flashed the latest 3.2.1 (in both rx and tx-module). Use the Radiomaster Ranger in TX16S (EdgeTX 2.8.1).
I come to the same result … Arduplane does not recognize the RX.
Default configuration, except for the settings according to the Matek documentation. Arduplane 4.3.5
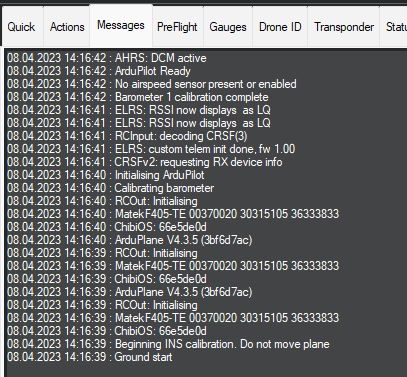
At most I get the following messages:
CRSFv2: RX device ping failed
CRSFv2: requesting RX device info
…
CRSFv2: requesting RX device info
CRSFv2: requesting RX device info
Maybe @andyp1per can help here?
You wouldn’t happen to have a param- file that works? I would love to try even if it’s not the same fc and rx.
I had not yet built the FC yesterday. I have now done and …
(GPS, Airspeed etc. not yet connected)
So it works. I also connected the battery this time and then USB. Has then worked immediately.
My parameter file for testing:
F405_WTE_Target0815.param (18.6 KB)
I am very greatfull for your effort. There were a few differences that I found between our files. I changed those but still the same result. Looks like it fixed some issues but the main problem remains the same i.e. the RX does not connect to the FC. I only get 9 telemetry params in TX and no stick movement in servo or in Mission planner. Actually the only problem now is:
“2023-04-08 16:05:13 : PreArm: Radio failsafe on
2023-04-08 16:04:42 : PreArm: Radio failsafe on
2023-04-08 16:04:11 : PreArm: Radio failsafe on
2023-04-08 16:03:41 : PreArm: Radio failsafe on
2023-04-08 16:03:10 : PreArm: Radio failsafe on
2023-04-08 16:02:39 : PreArm: Radio failsafe on”
Did you also connect the battery?