Hello.
I finished the roll and pitch during automatic tuning
Auto tuning for YAW was not completed.
Notch filtration was not performed.
In addition, some yawing was observed after takeoff from the interior to Stabilize Mode.
The specifications of my quad are as follows.
CUAV V5+
GPS Neo V2
DJI E800 Motor
1345 Prop
X-frame 800 mm
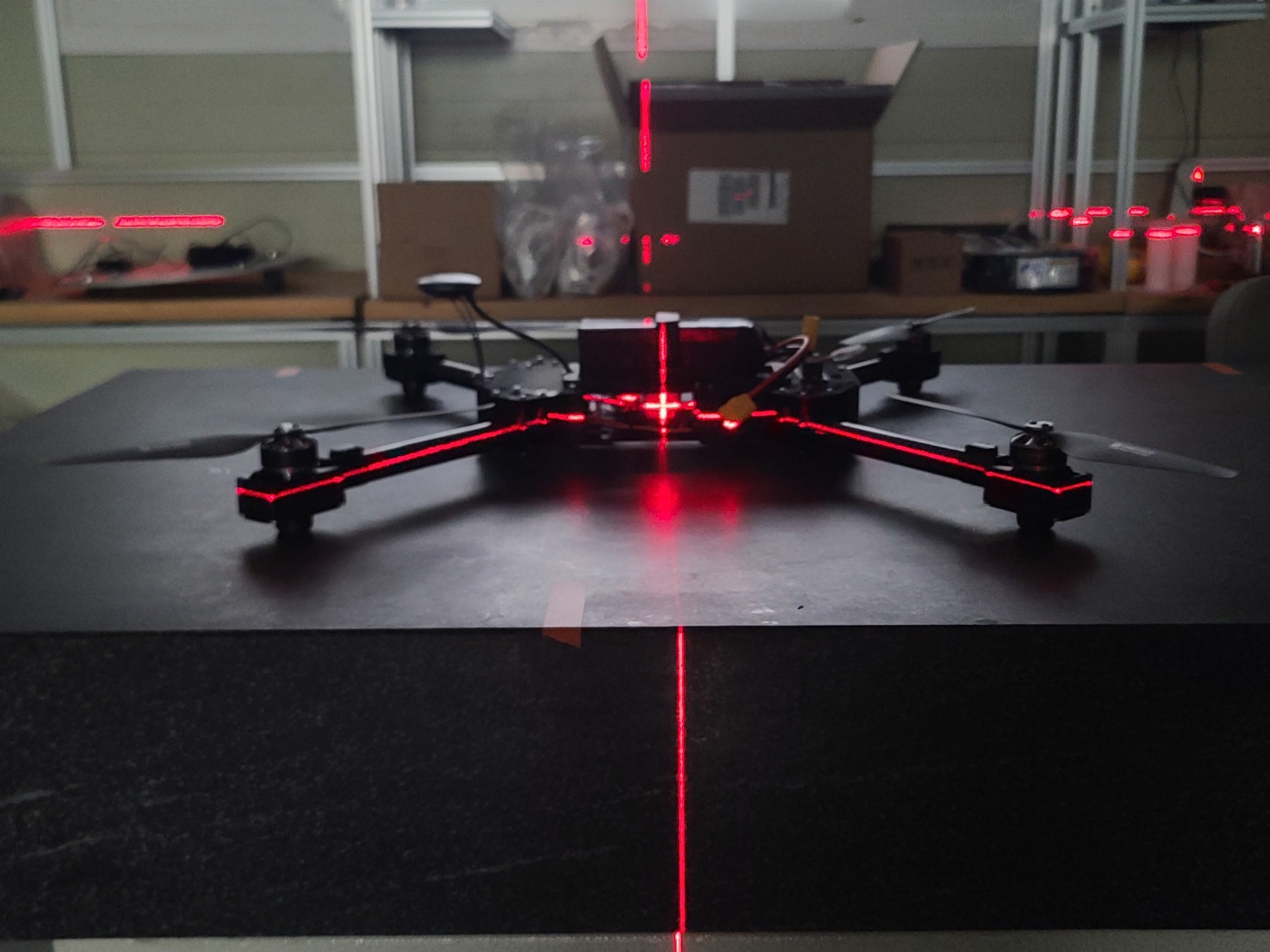
Horizontal adjustment for Motor Mount has been completed.
Yawing phenomenon? (Slight movement of yaw) and please help with Auto-Tune’s problem solving method for Yaw.
I think once the problem with the yawing phenomenon is solved, Autotune will also be solved.
That method can work but it didn’t in your case. Try a spirit level on the Square section of the motor mount maybe.
It’s not only for CompassMot it’s for basic compass calibration also. You can use MAXExplorer or the Webtool Webtools
Set these 2 parameters and make a simple hover flight in AltHold for a minute or so and use that log again using Webtools.
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
All right.
I’ll try again as it says on the tuning page.
I don’t understand the additional questions you answered. Is there a site I can refer to?
(It’s not only for CompassMot it’s for basic compass calibration also. You can use MAXExplorer or the Webtool Webtools)
Magfit using MAVExplorer Magfit
Using Webtools Magfit
If you get stuck post a log of a flight with some figure 8’s and throttle changes and we can help you out. You could do this flight right after the hover flight and link to both identified logs.
Yaw Bias: Corrected again using a horizontal meter.
AltHold Flight
notch filter INS_LOG_BAT_MASK = 1
INS_LOG_BAT_OPT = 4
INS_ACCEL_FILTER = 10
After setting up like this, I flew AltHold for a minute. After the flight, I did Autotune on the Yaw axis
Autotune for Yaw has been successful.
Loiter Flight
Tested with a Loiter flight to Autotune. The movement to Yaw has disappeared, and I’m still a beginner, but I’m happy with the flight results.
However, I would like to learn a little more from you rather than just the results like this. It can be a long article, and there may be parts you don’t understand, but I want to learn a little more.
Please take a look at the log and let me know if there is anything else that needs to be fixed and added.
Also, I’d like to know how I can see and analyze the logs I need for this quadcopter.
Please let me know what I should look at and study.
We always appreciate your kind response and interest.
※ I couldn’t perform the notch filter part because I didn’t understand it.
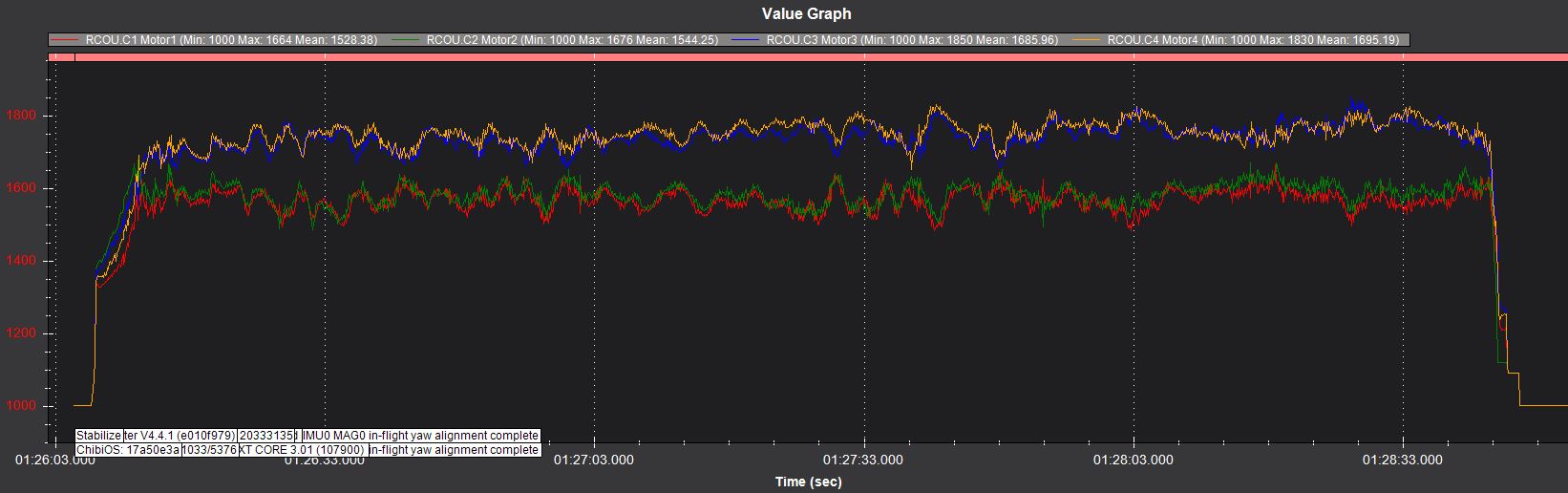
You still have the Yaw bias. Try swapping props or a new set of props if you believe the motors are level. When you review the log use the same parameters I show here and the goal is for all 4 to roughly overlay in a hover condition.
After correcting the Yaw bias and configuring the Notch filter run another Auto Tune in all axis. I still think your craft is overweight/underpowered but it might be OK. If you see “thrust loss” errors in the log you will have to address this.
My flight test was delayed due to another project. Sorry
I made some changes to Motor and Prop.
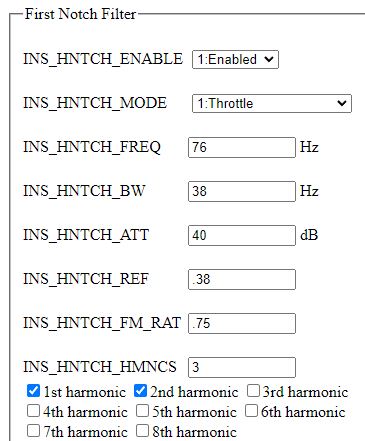
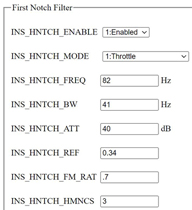
Motor changed from E800 to T-motor MN3510 360KV Motor, Prop changed from 1345 Prop to P14*4.5 Prop, and completed flight after performing Notch filter parameters as you told me
I fly on a windy day so I don’t know what the exact data will be like, but please look at the log, correct it, and let me know if there’s anything I need to add
Thank you at all times.
As you told me, I completed the notch filtering configuration and conducted three flights.
The first is an alt-hold flight
The second one is hovering
The third one was a free flight
Look at the log and let me know if there’s anything I need to fix
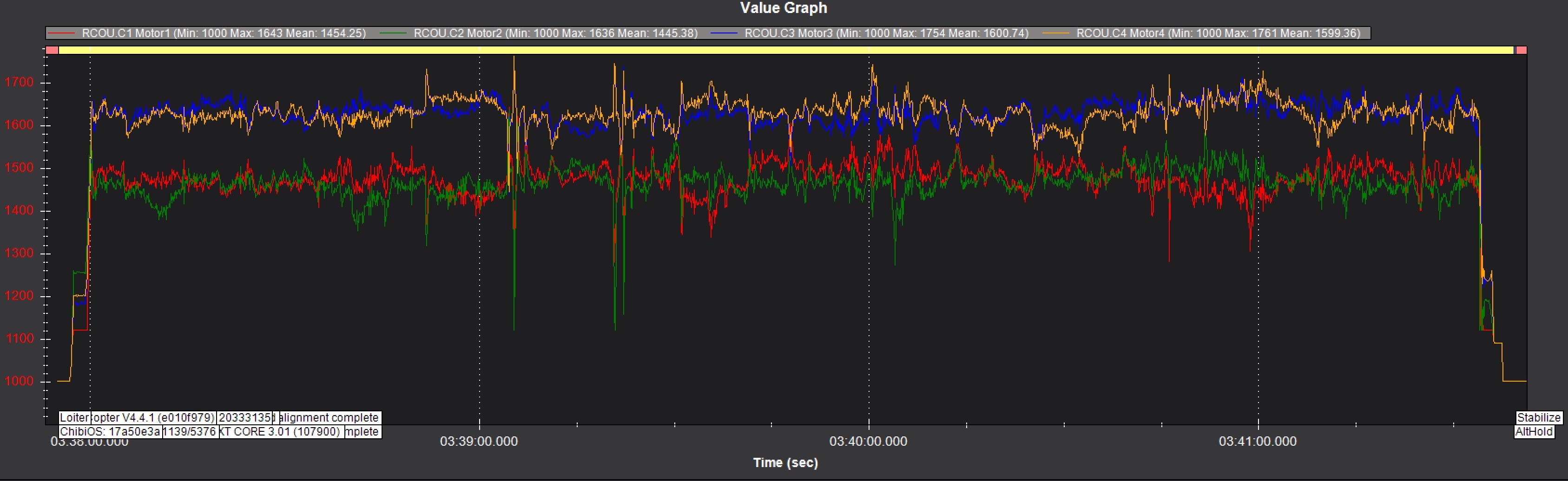
What I’m curious about is that when you look at the notch filter and look at the log records, please let me know what you see and how you judge
For your information, the Yaw bias is constantly being revised,
It keeps changing every time I do it, so I don’t think I can fix it with any more hardware
The pictures below are the ways to correct the Yaw bias
I’m always grateful, and I hope you’re healthy, thank you!!
It looks like you have done everything possible to level the motors yet this still persists. Consider some usually unlikely possibilities:
ESC Calibration
Poor quality props where they don’t produce equal thrust. Perhaps change them.
A Yaw command (which I don’t see). But for the hell of it check to see if the Yaw trim on the radio is centered and perform another Radio Calibration.
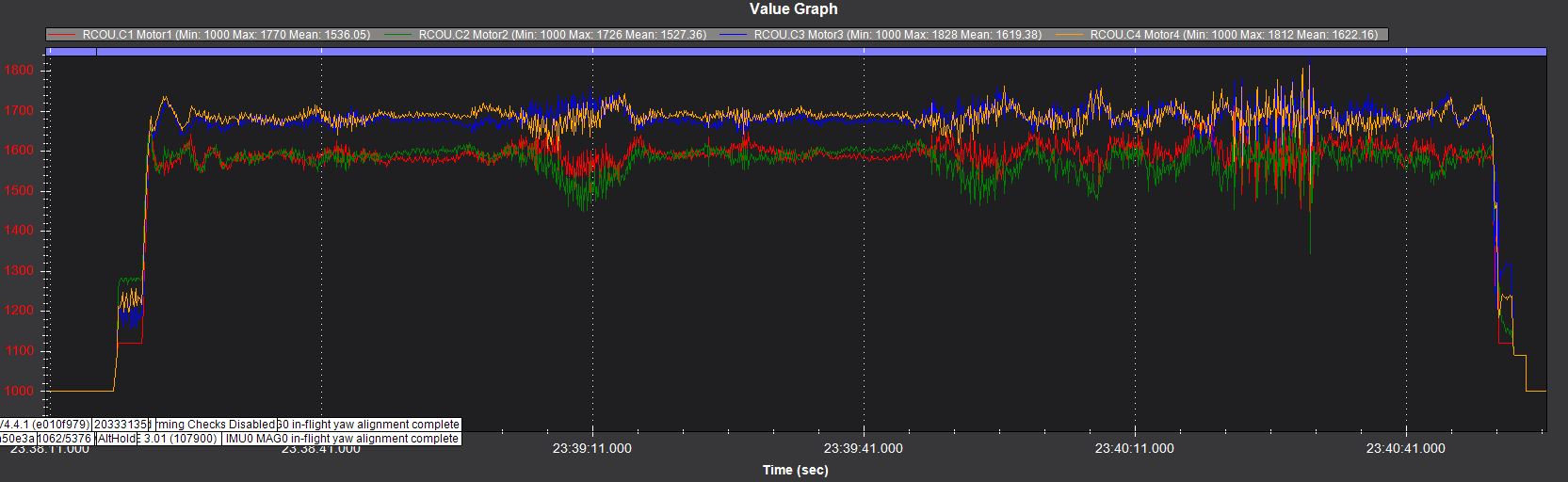
The Notch Filter is working well. Open the AltHold file in the Filter Review Tool Check Linear Amplitude Scale and Notch Tracking, show Notch one. Then look at Pre-Filter and Post Filter in the graph. You will see it well configured.
The tune looks good. The Y-vibes are a bit high and maybe that’s related to the props.