Okay, I will try and send you log’s here
Hello guys, here is .bin file after flight with settings what i got from you, everything was clear and I didn’t feel difference>>> 00000056.BIN - ZippyShare
We can’t have @papa_seleckis damaging more 41" props. We want to do whatever we can for him to succeed!!
1 Like
![]()
![]()
![]()
![]()
![]()
![]() That very kind from you, because I already brake a lot of them and put drone upside down
That very kind from you, because I already brake a lot of them and put drone upside down
1 Like
Attitude control is quite good.
Ascents and descents look OK, which is a good sign that MOT_THST_EXPO is correct.
What were your observations?
I would just update
INS_HNTCH_REF,0.15
then probably run a Yaw Autotune since it would be safest, and see how the copter reacts.
AUTOTUNE_AXES,4
and judge if you think it’s worth running a Pitch or Roll autotune (then copy the updated parameters to the other axis).
Aiititude control does look OK at 1st glance but @papa_seleckis I’m wondering what you see when you make a Pitch/Roll stick input when the craft recovers from this? This seems to show some recovery overshoot, Pitch is similar:
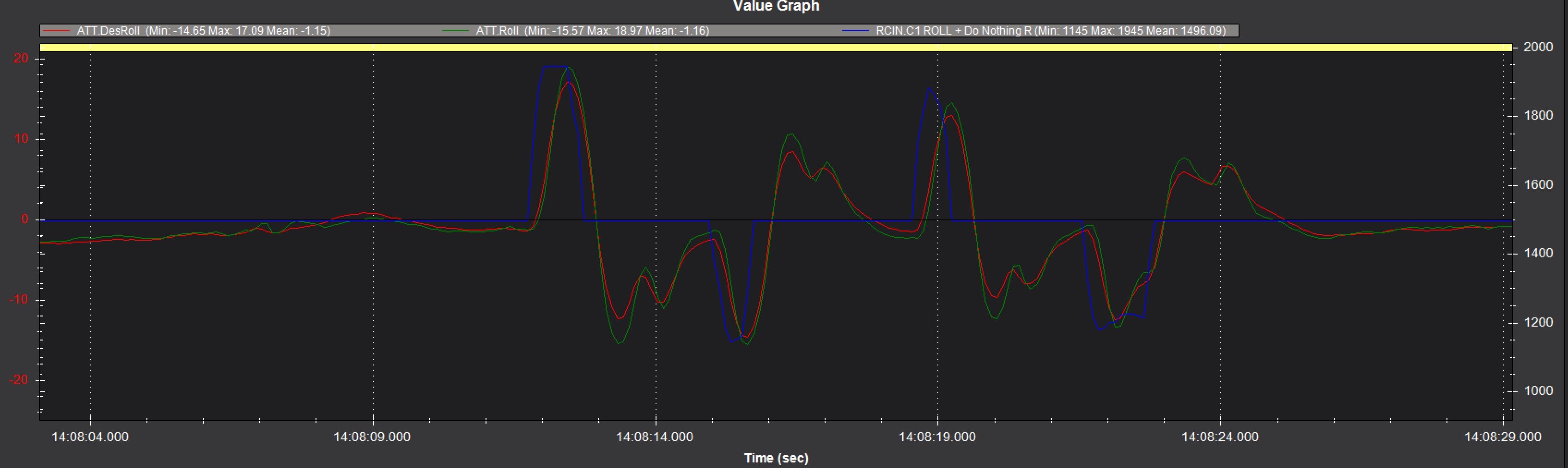
It’s not alarming just a consideration for further tuning. With a craft this large this is not unexpected.
In the air, he doing great, now it could be little bit more twitchy. But I have one question, it taking off really slow, looks like he have tough time to take off, roll/pitch what i see on my eye it’s okay, just could be little bit more twitchy.
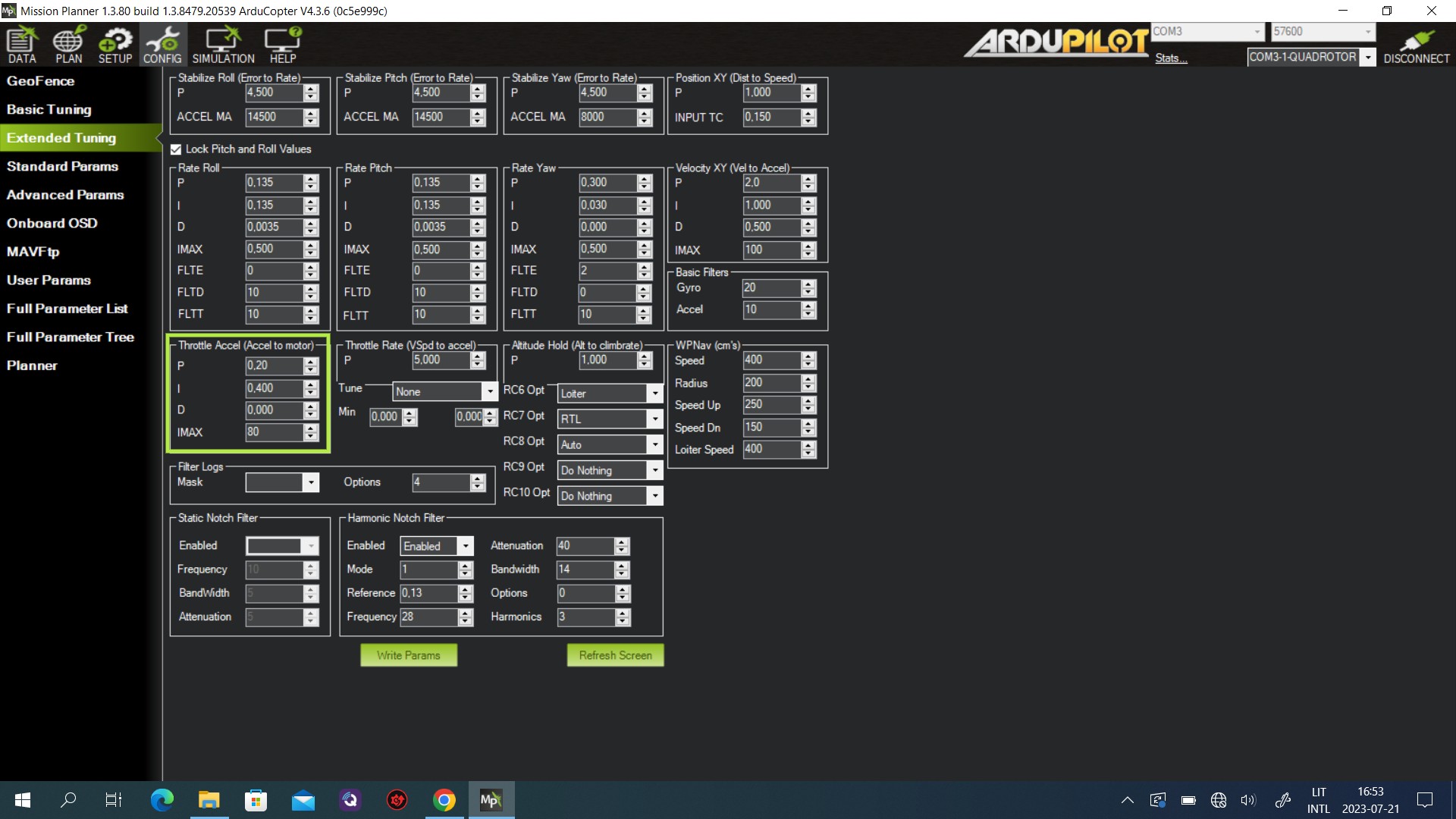
When that guys was fixing drone from start he really put much work on that on that place where i point it, is everything okay there, or should I put other numbers?
Those values are good where they are. Maybe later when you have a payload they can be reviewed as they are based on the MOT_THST_HOVER value.
Can you describe this in more detail what you are seeing?
it could be more aggressive, but just a little bit, and about take off he from stabilize he goes normal like it should be, but in loiter he goes slow while taking off
That’s expected behavior for Loiter mode. There are parameters to change this but you have to be careful with setting them. If you plan on running Auto Tune I would put off changing those parameters until tuning is complete.
These are the parameters that will modify that behavior (defaults shown):
PILOT_ACCEL_Z,50
PILOT_SPEED_DN,0
PILOT_SPEED_UP,250
PSC_JERK_Z,5
Hello guys, there are flight after autotune… 00000059.BIN - ZippyShare
We made all 2 tunes, roll pitch and yaw tunes, but in the extend tuning settings nothing changed at all
That’s because you disarmed in Loiter mode. So, nothing was saved. Run it again and when Auto Tune completes land and disarm without changing modes. And I only see Yaw tuning that was stopped and started so nothing was really accomplished.
okay. I will charge batteries and do it again
If you want to Tune Pitch, Roll and Yaw in one flight you need to set AUTOTUNE_AXES back to 7.
And you had some Fence breaches during the last tune, perhaps increase the fence radius otherwise it may not complete.
Wellm I did autotune, but didnt took flight, because it was very dark, so i will do it tomorow and here is the autotune file >>> 00000060.BIN - ZippyShare
Success! The Rate P&I values look reasonable as do the ACCEL max values. The D term is relatively high, it will be interesting to see how it performs in real flight. Do some flying around tomorrow with some good Pitch, Roll and Yaw inputs and we’ll see how the new tune values do!
Nice work so far.
@dkemxr Hi Dave
I saw that pitch/roll overshoot too - but then I realised it’s probably just a correction due to being in Loiter mode. In the part of the log that is non-Loiter (altHold I think) that overshoot/correction doesnt happen.
I think I even looked at the position controller data too and decided not to mention it.
I’m fairly certain that since it’s a big copter, a small pitch or roll causes a fair bit of lateral movement that Loiter tries to stop when you centre the sticks, doing it’s braking action.
You can even see the double-dip that is common in Loiter braking unless you fine tune those Loiter params.
We’ve had copters that wouldnt start moving so much until you hold a pitch or roll attitude for a while, so you could get the attitude changes “on the spot” even in Loiter mode, and you wouldnt see that braking action.
Hello guys, we made a flight, and results are not okay, First of all on loiter drone shake, all axis whole drone was on shake, we made little turns on angle and it’s not good ,on alt hold doesn’t shake at all. But he losing his altitude very much, when i put him to move. Here is the file of my flight >>>>> 00000062.BIN - ZippyShare