We using translator and translator make translate in wrong way sorry about that
Yes I did. Right here. You did not follow these instructions.
What prop size do you have?
41135 on the prop, okay i will put everything back 41inch.
Now set the Rate Pitch/Roll PID’s back to default as I said in the previous post. I had assumed you had followed that direction but I see you did not.
These to 0.135
ATC_RAT_PIT_I
ATC_RAT_PIT_P
ATC_RAT_RLL_I
ATC_RAT_RLL_P
And these to to .0035
ATC_RAT_PIT_D
ATC_RAT_RLL_D
Then make another short flight in AltHold.
What prop size?
And set these. They should have been set from the Initial Tuning Parameters. Did you perform that as I suggested?
MOT_BAT_VOLT_MAX
MOT_BAT_VOLT_MIN…
The problem is, I’m not sure which one was by defaults, cause we had a guy who started to make him, but he couldn’t finish because he say its too hard, and then we started to do something…
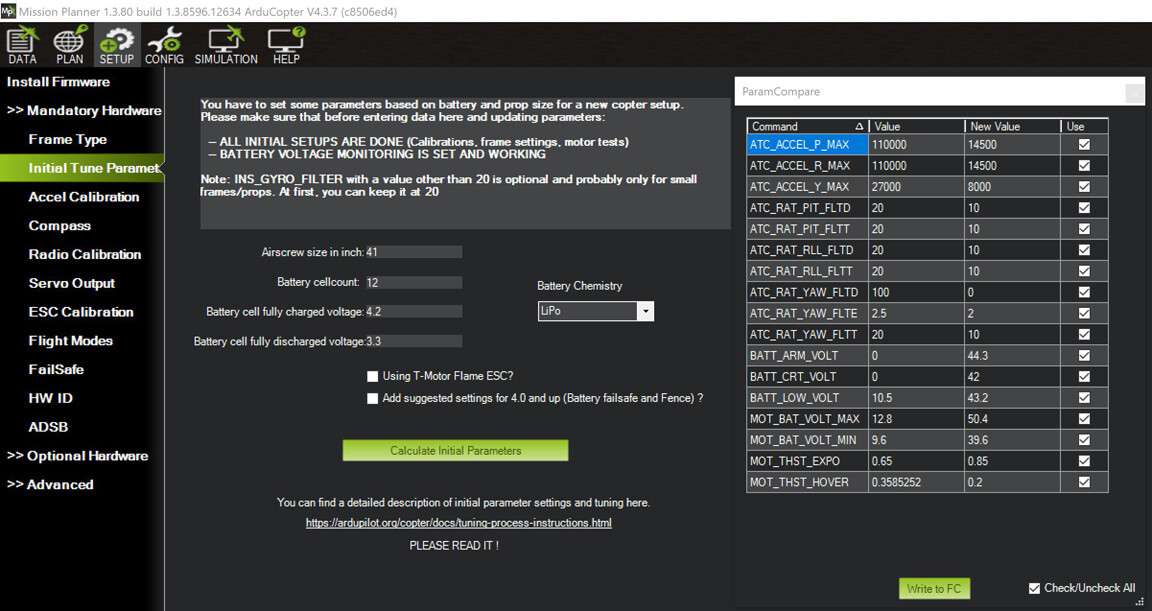
when i put my props size battery cells and voltage it goin back where it was before. i have 41inch and it coming back to 9inch
I don’t know what you are looking at. Simply input 41 for prop size and 12S for the battery and hit the “calculate Initial Parameters” button. When the table pops up hit the “write to FC” button.
What ESC’s do you have?
I told you what the defaults are right in the post.
00000054.BIN - ZippyShare I did everything you say, all looks like going better and better. I have hobbywing x9 max motors, and it came already with it so I don’t know.
Excellent, looking good!
Now let’s configure the Notch Filter:
INS_HNTCH_ENABLE,1 (then Refresh the Parameters, button on right side of screen)
INS_HNTCH_ATT,40
INS_HNTCH_BW,26
INS_HNTCH_FM_RAT,0.8
INS_HNTCH_FREQ,52
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,1
INS_HNTCH_OPTS,1
INS_HNTCH_REF,0.17
Then make one more Hover Flight in AltHold and post that log. I expect it will be flying fairly well now. You can also set this:
ATC_THR_MIX_MAN,0.5
Last param couldn’t change because i was on my way already, i will change it right now, here is the link 00000055.BIN - ZippyShare every flight better and better!
Nice work, this is looking very good. The next step would normally be to run Auto Tune. This is the largest Quadcopter I have ever offered assistance with so before doing that I would like Shawn @xfacta to take at look at where you are with this. With 116kg of thrust available we want to make sure everything is right before executing Auto Tune.
Is there a Payload on the craft or a plan to put one?
Nice thanks for everything, I have one more project, with 6 x11 MAX motors, new challenge waiting for you! haha
6 X11’s? Damn, that’s a lot of power.
Yup, it’s gonna be big thing
I was asking about a payload because there is some output imbalance. Perhaps due to battery placement, not sure:
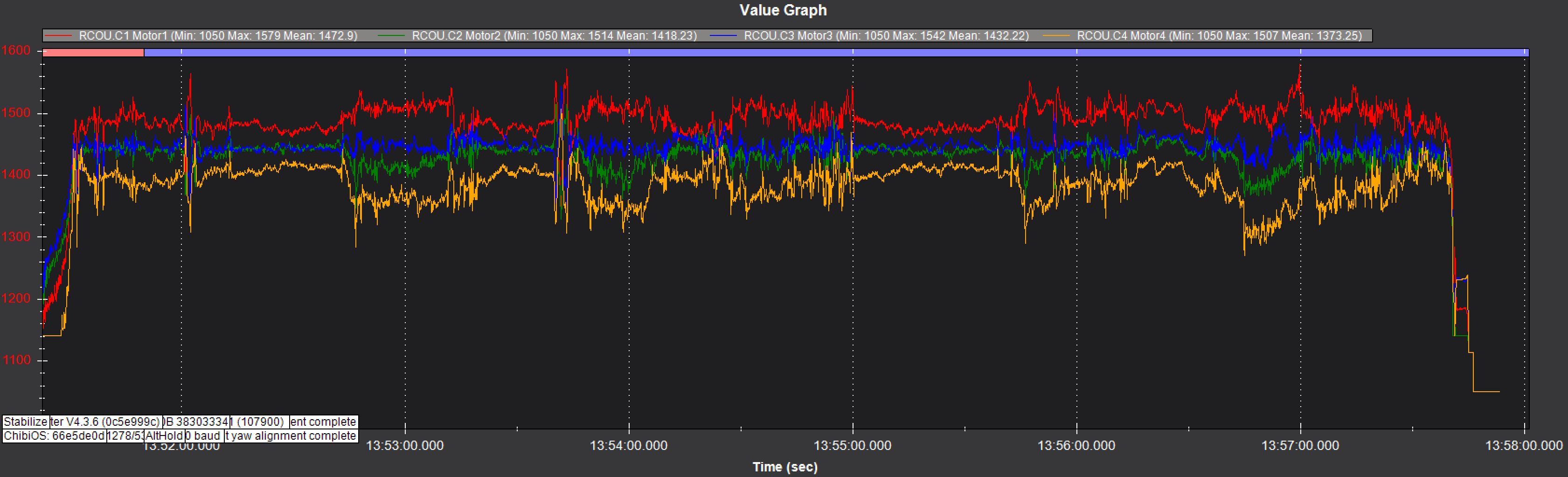
Often we see an imbalance in Yaw (twisted arms or motor mounts) but this is not that.
payload will be about 25 kg. Now when we fly drone was naked, just 4 batteries, thats it. it can be for vibration ?
No, vibration is not bad. This is something that can be looked at again when you have a payload on it, it’s OK for now.
So, I need to make autotune with ayload or not? I wondering to put 12kg in autotune, because drone goin in one side without payload and come back with
Autotune without the payload, then we adjust a few parameters to compensate for the payload. Don’t rush into Autotune yet though. We can talk about the payload later - you might not need to make any adjustments.
Vibrations are a little high, see if you can reduce vibrations. It could just be wiring attached to the flight controller, or you might need better damping. This is not causing problems right now.
There is a lot of good work already done. Just because I list a lot of parameters here does not mean there was anything wrong, just that we are making improvements or gathering more data.
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,3
FENCE_ENABLE,1 // and check the Fence radius and altitude
GPS_AUTO_SWITCH,4
GPS_GNSS_MODE,65
GPS_GNSS_MODE2,65
GPS_PRIMARY,1
INS_ACCEL_FILTER,10
INS_HNTCH_BW,14
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_FREQ,28
INS_HNTCH_OPTS,0
INS_HNTCH_REF,0.13
LOG_BITMASK,180222
MOT_THST_EXPO,0.80 // this may alter the hover thrust a little
The battery failsafe actions are VERY important.
I’ve suggested some GPS changes that should improve the time to 3D Fix and reliability. Also enable the Fence with this beast, so you know for sure the Home position is set before you can arm.
There is some harmonic notch filter improvements, and logging of PIDs.
Also I’ve asked for a slight reduction in expo - I’m working on improving our expo calculations based on real-world data so the value I propose is likely “more correct” than the old value. It’s not a big change so you shouldnt see adverse affects from changing the expo.
Do another flight in AltHold and Loiter - let us see that log.
Then we can decide if it’s worth changing PIDs manually or if you can try Autotune.
No payload for Auto Tune. Some of the parameters can be adjusted after the payload is added.
As an outsider, reading this with much interest, I just want to say what a great job you guys are doing of helping papa_seleckis with this.
![]()
![]()
![]()