Or these, renowned for being ultra reliable
Hello my friends,
finally the my tarot 690s has taken off.
The first flight, the log of which I am attaching, went quite well.
The hexacopter is sufficiently stable to switch to autotune.
however, I apparently found only one anomaly: the A-C-E engines were obviously warmer than the other three which were practically cold.
What do you think could be due?
I am attaching the log.
Thanks for your always valuable help.
@smartdave @xfacta @dkemxr
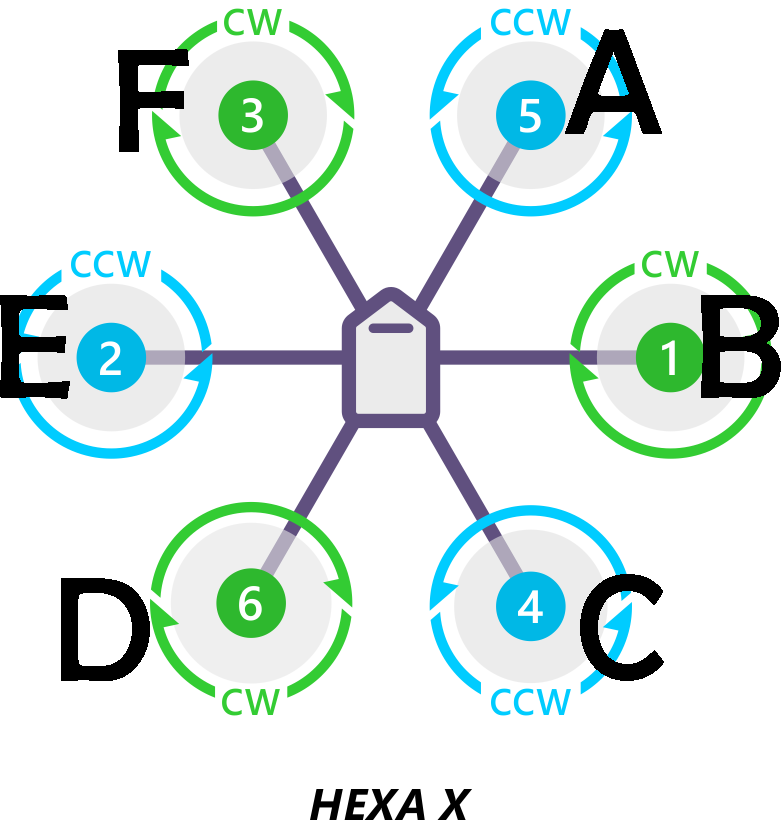
There is a YAW bias causing the CCW motors (ACE) to be commanded higher than the CW motors.That’s why they are hotter. This is typically due to the motors/props not being level from a twisted motor mount or frame arm or distortion of the frame. This is not as bad as some we have seen. I know many have got these Tarot frames flying well but IMO there is too much Monkey Motion* going on with the folding mechanism that makes it more of a challenge.
*Highly technical term 
CW and CCW motors shown in Blue/Red for effect:
I have a few Tarot frames and have exactly the same readings as you do. However after a proper tune you shouldn’t have motors that are hot or very warm to the touch.
1 Like
Thanks my friends.
I will better control the leveling of the motors.
In fact, I suspected it was a YAW problem since all the engines that run in the same direction were involved.
But I also wanted a confirmation from you.
I’ll keep you up-to-date.
Thank you all
Hello my friends,
I proceeded to check the alignment of the motors with one level and actually 2 motors (3F D6) were 4° off-axis.
I checked them all and put them on the bubble. Any divergence, however, remains within 1 degree.
After a short flight there is no longer a clear difference in heat between those that turn clockwise and counterclockwise. Those that turn anticlockwise, however, remain slightly warmer.
What else do you think I could control?
Thanks @smartdave @dkemxr @xfacta
On the log, however, the yaw trend worries me a lot!!!
When you say warm, how warm are they. Normally it’s the D that drives the heat up in the motors
I can check the log file in a little while however, how is the Yaw reacting to the sticks?
Thank you for your answer. When you check the log you will see an unusual trend of the values yaw w desyaw … I have never operated the sticks for the yaw. The engines can be easily touched with the fingers but some are a little warmer …
Hi friends,
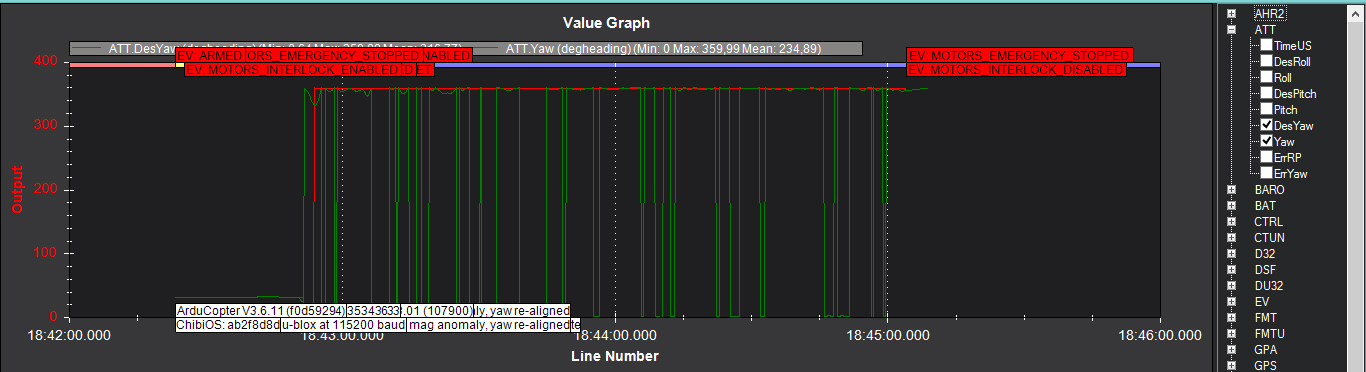
Analyzing the log I found this abnormal yaw trend that worries me a lot.
In the previous flight it had not occurred.
the difference between the previous flight and this is the best leveling of the engines (but not yet ideal).
What do you think it can be? “EKF2_IMU0_mag_anomaly, yaw re-aligned” and “EKF2_IMU1_mag_anomaly, yaw re-aligned” messages appear. shortly after the realignment process is complete.
Thanks friends @smartdave @xfacta @dkemxr
So what was the craft doing here? A heading of North with small yaw movements back and forth? If so make another hover flight with a different heading. Any heading other than 360/0.
I’m sorry but I don’t understand well … do I have to make another flight with a different orientation? Or in another area?
This flight was for testing only and I never operated the yaw. I just wanted to see if the engine leveling had improved since the previous flight.
Thanks @dkemxr
Yes, engine leveling was effective the yaw bias has been reduced. Still present but a bit better.
For this yaw event sometimes if the vehicle is pointing due North it will flip from a heading of 360 to 1 and make a graph like that. It looks bad on the graph but it’s actually only a degree or so of yaw change. This is what I was asking. If you point it to any other heading you won’t have this and yaw analysis will be easier.
Ah OK!!!
I will try both to change orientation and to level the motors more!
Thank’s @dkemxr
Hi my friends
after several attempts I managed to achieve this by leveling the engines.
I can’t improve further.
I have done various tests but this is the best result.
Do you think it is enough to switch to autotune and fly safely?
The hexacopter responds well to commands. Only sometimes does it have small variations of the yaw but without absolutely creating problems or alarms.
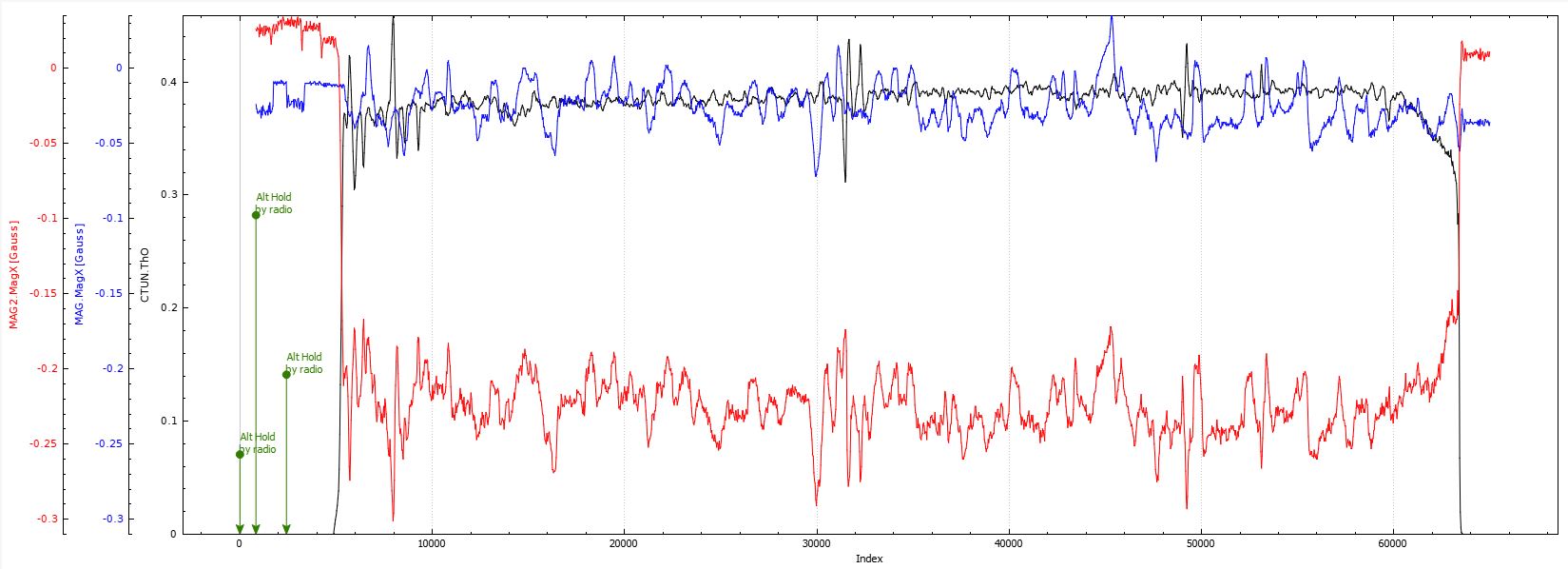
I also attach the yaw-desyaw chart because it seems to me rather anomalous … what do you think?
Thank you all for your valuable advice @dkemxr @smartdave @xfacta


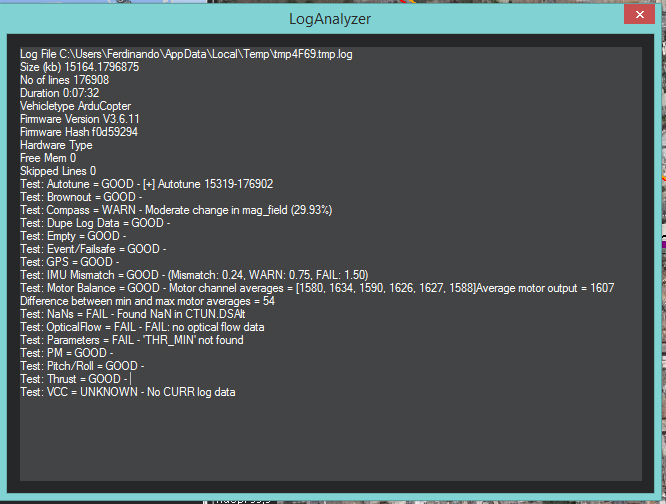
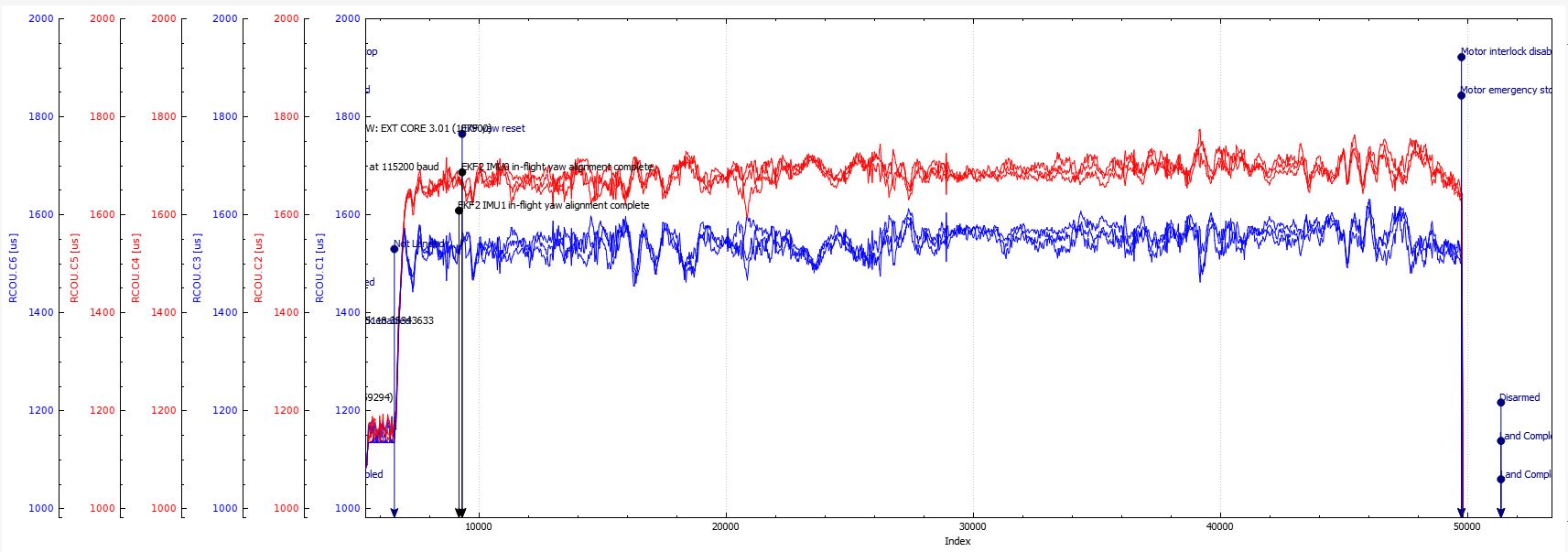
The motor balance is now good. But as you say there is an issue with un-commanded Yaw. Perhaps you should disable Compass 2 and try again as it seems to be influenced by motor current (throttle) as shown in this graph. Why are you still on Copter 3.6.11 and not updating to current Stable?
Hello friends.
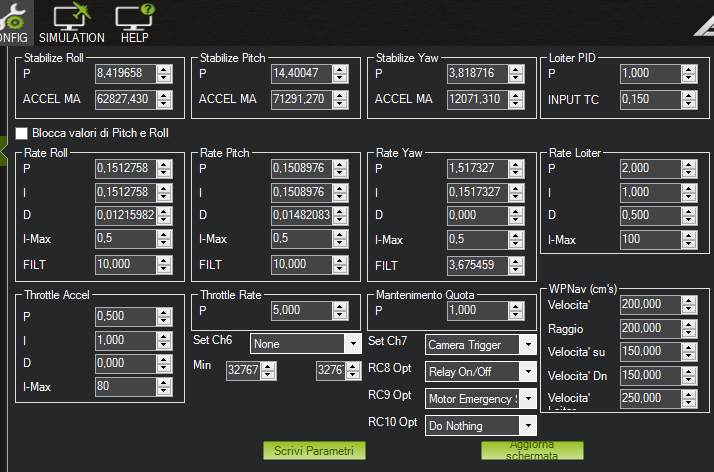
I finished autotune one axis at a time.
Here are the values returned by the control unit.
the hexacopter responds well and I am satisfied.
Unfortunately, despite several attempts to solve the problem on the control unit compass, I have not been able to improve the values (I have tried various shields that have done nothing but increase the variance).
Since it remains within values of 25-35% I think I will leave it like this. What do you think?
Today I am updating to 4.0.3 firmware version.
Thank you all for your invaluable collaboration @dkemxr @smartdave @xfacta