Hi friends,
i need help for my first flight aborted for inclination problem.
I made 2 attempts to take off. the first ended with a backward somersault. The second, by operating the gas more slowly, I noticed a tendency to lean to the side … in all 2 attempts I did not detach from the ground.
My setup is: Pixhawk4 whit Tarot 690s and Arducopter 3.6.11, 5 kg total weight.
I attach log.
Thank’s to all for help"
Hi, thank’s for your reply @dkemxr
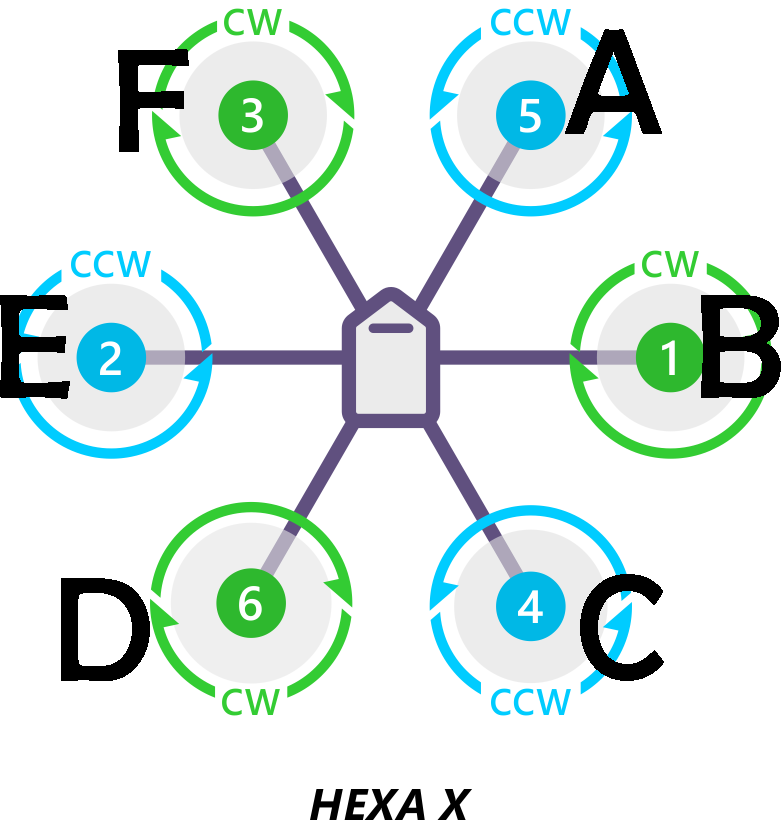
Yes, i utilised Motor test and order and direction of motors is OK.
I tested the drone bound by the arms on the bench. The motors and esc work and do not overheat up to 15A each. I simulated a couple of 8-minute flights with the drone bound on the bench. But yesterday at the real test, not found on the bench, I noticed this behavior. Yesterday I operated the gas very slowly in “Stabilize” and reached almost 50% the drone was about to rise but revealed this anomalous behavior. Being heavy 5 kg I would like to be sure not to do any damage. The log I checked and everything looks ok but I’m still a beginner. The vibrations are within the limits. What do you think about it?
Thank you
Not much can be learned form the log with the craft on the ground. Are you absolutely sure the motor order is correct? The order that Mission Planner runs the motors (A-F/ front right then clockwise) is not always clearly understood.
Describe the components on the craft. Motors, props, power (4S,6S).
Yes, that’s right. If the props are tuning in the right direction then give it throttle quicker and get it in the air. I assume you did an accelerometer calibration? Which 710Kv motors?
For safety I will repeat compass calibration and accelerometers. Then I will recover to take off. But there is no system of supports or constraints that can prevent any damage on the first flight as in my case? I mount RCtimer engines X4 710kv.
Thanks for your help friend!!!
That configuration should be fine with regards to thrust/weight (~2:1). If you have done all calibrations (including ESC’s) and are sure of motor order and prop direction all you can do is fly it. Slowly increasing the throttle is not the way to take-off particularity with landing gear like you have. Take off in Stabilize mode with a small burst of throttle to get it at least 1m off the ground.
Thanks friend
I will follow your precious advice!
As soon as I check all the parameters again I will try to take off again.
I keep you updated on progress.
If you are successful at taking off in Stabilize mode and hovering for a minute or so switch to AltHold and Hover for a couple minutes, land and post that log.
You could also try setting althold not stabalize before taking off. Set the mode and then arm and raise the throttle, once you get past the midpoint the motors should really spool up and the craft should raise very smoothly.
Hi friends,
i have an update. I tried to take off again after recalibrating accelerometers and compass. To be on the safe side, I have adopted a binding rope. I’m having trouble taking off. The drone tends to lie down on one side which is not always the same. The take-off surface is country terrain and therefore not perfectly level. However, after taking off from the ground with the help of the restraint rope which prevents tipping over, the flight is normal. Do you have any suggestions? Unfortunately I have no videos. But I enter the log. Thanks friends @dkemxr@smartdave
As I have mentioned before, take off in ALThold mode. The reason I say this, as you move up the throttle it will spool up quite a bit then very smoothly take off from the ground.
In stabalize mode you need to work the pitch/collective stick to keep the copter level as you take off. Unless you do as @dkemxr says and just lay into the throttle and get it off the ground quickly
no.
now I calmly put on and set all the parameters as in the guide you suggest me.
As soon as the setup is complete I will try taking off again.
Thanks friend