I apologize @Leonardthall . it is my fault , that was my old setting. I use this values that @andyp1per adviced.
here is :
INS_HNTCH_ATT 40
INS_HNTCH_BW 20
INS_HNTCH_FREQ 40.5
INS_HNTCH_HMNCS 3
INS_HNTCH_MODE 1
INS_HNTCH_REF 0.22
But I dont know why result FFT a bit messy.
Flying good but sensitive to the wind so a little shaking in little windy weather. So i am not happy i want to see too stable flight just like your Callisto 50
Can you share a sample log that record of callisto
Actually i cannot decide which one of result is better ? Which settings should I continue with ?
when intializly take by stablize mode ,but while takeoff my copter keep tilting leftside and taking off.
rc controls are look ok but not upto the level.
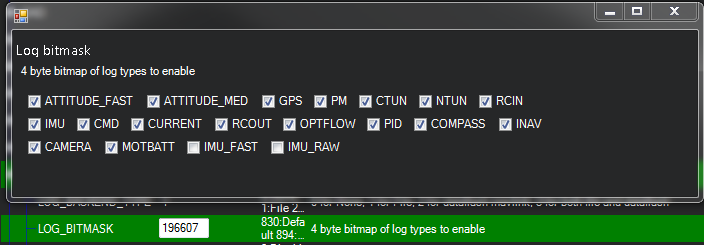
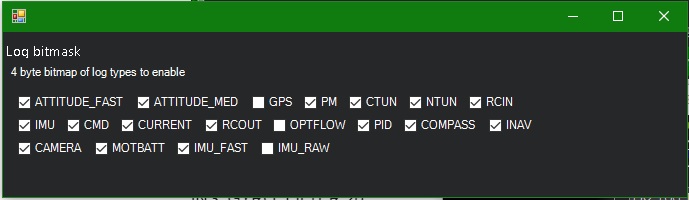
i have enabled FFT batch log for to find HNOTCH filter frequency and reviewd with MP but little confusion with withone i have to take for the HNOTCH filter frequency.
please help me with tune better for the parameter also.
thank you.
You got the logs mixed up there but clearly the best settings are:
NS_GYRO_FILTER 20
ATC_RAT_PIT_FLTD 10
ATC_RAT_PIT_FLTT 10
ATC_RAT_RLL_FLTD 10
ATC_RAT_RLL_FLTT 10
ATC_RAT_YAW_FLTE 1
ATC_RAT_YAW_FLTT 10
the ALT_HOLD_test.log
Sorry, I can’t share a log of the Callisto without permission. I can tell you that there is a lot more than just the tune that goes into achieving that level of performance. But it is a good example of what performance you can get if you get everything right.
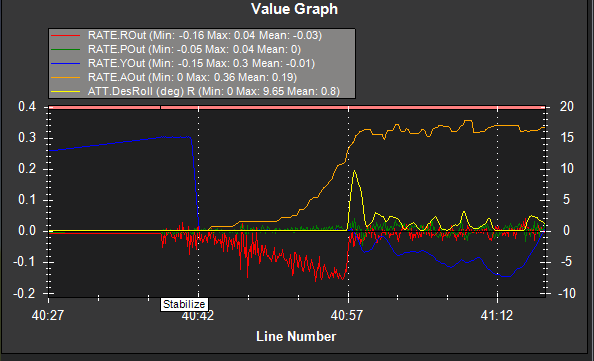
The aircraft is sitting on the ground with a tilt of 1 to 2 degrees. What you are seeing is it trying to correct that as you are throttling up very slowly.
So the I term is building up. If you take off a little quicker you won’t have that problem. You should also make sure your aircraft is properly leveled.
@Leonardthall
Thank you for your valuable reply.
Yes when I increase throttle slowly it’s taking off with left-side roll tilting.yesterday I tested with likey fast throttling then it’s took off up level .thank you problem solved .if I want give slow throttle also it should takeoff level for that what should I do. If I correct that 1 or 2 degree ground tilt will that problem solved?
As you suggested hormonic notch filter setting will reduce this issue ?
Leonardthall can you suggest me with my INS_ACC_FILTER & INS_GYRO_ FILTER setting ,PID & vibration all are ok .
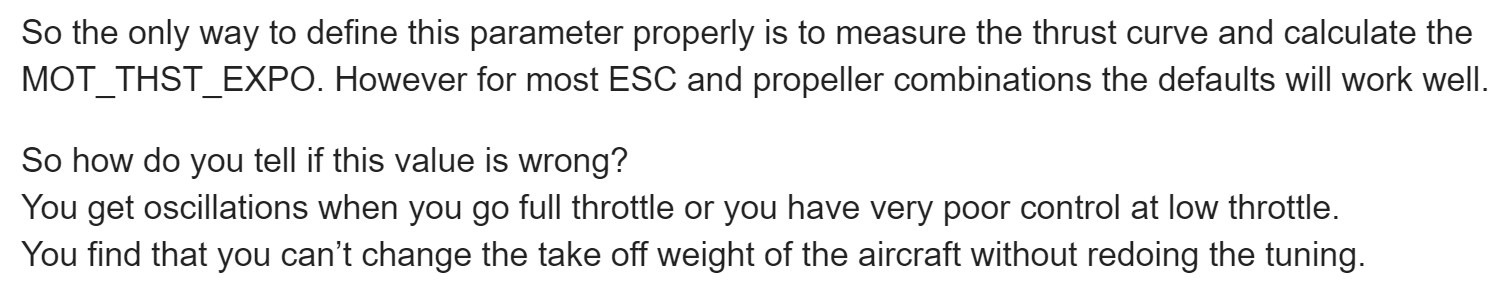
Every flight MOT_THR_EXPO keep changing .it’s usual?
If you want to take off slowly in Stabilize you need to put stick input equal to the aircraft’s attitude. So if it is rolled to the left you need to put stick in to match.
This does seem like something we may be able to do better… I will have to think about it.
Your vibrations look ok even without the harmonic notch. If the aircraft is handling the way you want then I would leave it the way it is. If you change those settings you need to do a retune.
MOT_THR_EXPO doesn’t change, I suspect you are getting mixed up with MOT_THST_HOVER just below it. Does that sound possible?
@Leonardthall
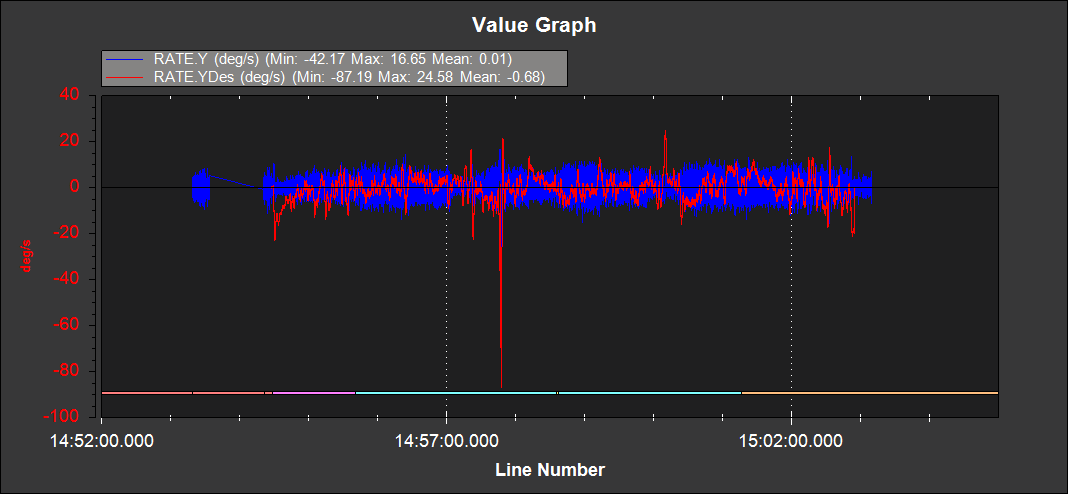
Yesterday i went for waypoint flying .there was short waypoint each length is about 100m.
Took off guided mode after reached some height then I engaged to auto mode,there is 3 stretch length among this last stretch inbetween the waypoint sudden oscillation .I don’t think it’s because of wind factor.
I will post log tomorrow can you find the reason that.
thank you very much for your guidance @Leonardthall … lastly, do you have a any suggestion for my hnotch filter.
INS_HNTCH_FREQ 40.5 is correct ? or just I should increase INS_HNTCH_BW ?
because you said
also, would it work well to reduce it further below 30000 ? for example 23000
I can give you a faster reply if you organise all the data I need to answer a question in the post you send. Sometimes I don’t have time to go back and find it for you.
You can increase INS_HNTCH_BW to 30. (frequency * 2/3)
This depends on what you are trying to achieve or what problem you are trying to solve.
and the wiki instructions, I set my copter’s MOT_THST_EXPO to 0.75(22 inch props), after that I found the copter lift off at 13% throttle in stabilize, and the MOT_THST_HOVER is 0.139, It’s became very hard to land, Is this what you said “have very poor control at low throttle” ? I changed it back to 0.65 It’s much smooth then 0.75, Is that meaning the wiki’s suggestion is not for every ESC?
My system has 24 inch prop quadcopter. While landing the drone experience high oscillations. I have tried in both alt hold and RTL mode but in both, i got the same oscillations. I am attaching the link of the log file for the same. Please guide.
")
 can you take a look to my last question please
can you take a look to my last question please