No access to that log. Please also give more details about the aircraft: frame size, battery, motors, ESCs…
@xfacta Here is the new link for log access.
https://drive.google.com/file/d/1BPcCW2Ed8hsO5WJemW-0fm6hEOKChWep/view?usp=sharing
Also, I am using Flame 60 esc with 24 inch prop.
Without checking tyour log yet, set these if you havent already:
MOT_THST_EXPO,0.2
MOT_PWM_MIN,1100
MOT_PWM_MAX,1940
thanks for the prompt reply. I will do that. Please have a look at logs also.
X and Y vibrations are bad, like very poor prop balance or some wiring hitting on the flight controller. Z is OK.
Fix that before flying again.
Check and set these too, some you already had, but be sure to use these values:
BATT_ARM_VOLT,44.3
BATT_CRT_VOLT,42
BATT_LOW_VOLT,43.2
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
MOT_BAT_VOLT_MAX,50.4
MOT_BAT_VOLT_MIN,39.6
After that and the previous settings MOT_ settings do another hover test and gentle fly around in ALTHOLD mode.
ok done, i will do the changes and update you after flying test
I have done the changes and fly the drone. It was flying fine but while descending it un-stabilize lesser as compared to previous in 1 out of 4 lights. So i try auto tuning and did it yesterday. It was flying fine and i have tested few flight of 80m altitude.
Today i tried the same i fly it at 120m altitude and then RTL it, the frame was stable with vibes. Then i reboot the system and did a takeoff, then it suddenly oscillates and crashed.
I am attaching the telemetry log of the last two flights.
telem logs.zip (737.4 KB)
Guidance required. Don’t want to loose my drone.
Those are Tlogs. Link to .bin log files.
i have changed copter balance and i cant connect current sensor because it may damage the current sensor if overcurrent flown through the sensor.
i have changed MOT_THST_EXPO to 0.2 .
https://drive.google.com/file/d/19Pd-fB2qHO-dId2MVzOwa3gPq4qHvrPZ/view?usp=sharing
before MOT_THST_HOVER was 0.22 as per previous flight but after this it is changed to 0.33.
https://drive.google.com/file/d/1j3tmRPpcFOtBdpa1_E_mAUKbIh_XClaR/view?usp=sharing
above log is MOT-THST_HOVER changed to 0.33.and INS_ACC_filter also changed to 20HZ.
after above flights i was set HORMONIC NOTCH filter and made test with LOG_BAT_OPT =2 for post hormonic filter analysis. i have attached that flight log also kindly look at all log and guide me
https://drive.google.com/file/d/1kvJYvZeQI-O2R_5KrjBaFYlo9ZrNA6Pm/view?usp=sharing
https://drive.google.com/file/d/1VmjTnMKC_HyFVvsqiS-Q1pDjvjr4MahJ/view?usp=sharing
@xfacta @dkemxr
Below are the bin logs of the flights that i have described in 87th comment
"
I have done the changes and fly the drone. It was flying fine but while descending it un-stabilize lesser as compared to previous in 1 out of 4 lights. So i try auto tuning and did it yesterday. It was flying fine and i have tested few flight of 80m altitude.
Today i tried the same i fly it at 120m altitude and then RTL it, the frame was stable with vibes. Then i reboot the system and did a takeoff, then it suddenly oscillates and crashed.
"
crash at takeoff after 120m flight
Please Guide
The vibration are way too high. you should deal with vibration first, then start tuning follow the https://ardupilot.org/copter/docs/tuning-process-instructions.html here, and read Leonard’s post start
here Heavy Lift Octorotor Oscillations on Landing, I tuned a copter with 21 inchs props recently, It’s helped me a lot, and my copter flies so well now, I’m really impressed.
ok. I have added a damping plate under the controller for vibration damping. is it the right way or any alternate method to damp the vibration on to it
I have again flown the drone after tuning and damping. It was performing fine on few flights. The normal wind was there, i was testing it taking off in different heading to check what would be the effect of wind on my drone. While testing in the last flight the drone oscillates badly and lead to crash. I am adding the log below for reference.
https://drive.google.com/file/d/1tyuDnduCZclx1FfM8C-Kbcx6lukdm1mT/view?usp=sharing
Kindly guide.
Is this a quad or Octo? If it’s an octo then you’ve got a serious configuration error.
The craft is set up as a quadcopter, and logs only show 4 servo outputs like a quadcopter but you have these other servo options set for some reason:
SERVO6 |56|RCIN6|
SERVO7 |57|RCIN7|
SERVO8 |58|RCIN8|
SERVO9 |59|RCIN9|
If this really is an Octo, then you need to set those to 0 select the correct frame type and frame class.
Also I strongly suggest setting these:
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
BATT_ARM_VOLT,44.3
BATT_CRT_VOLT,42
BATT_LOW_VOLT,43.2
MOT_BAT_VOLT_MAX,50.4
MOT_BAT_VOLT_MIN,39.6
MOT_THST_EXPO,0.2
MOT_PWM_MIN,1100
MOT_PWM_MAX,1940
ATC_RAT_PIT_FLTD,12 <- setting these as low as 10 seems to affect control
ATC_RAT_PIT_FLTT,12
ATC_RAT_RLL_FLTD,12
ATC_RAT_RLL_FLTT,12
ATC_RAT_YAW_FLTT,12
Attitude is barely under control
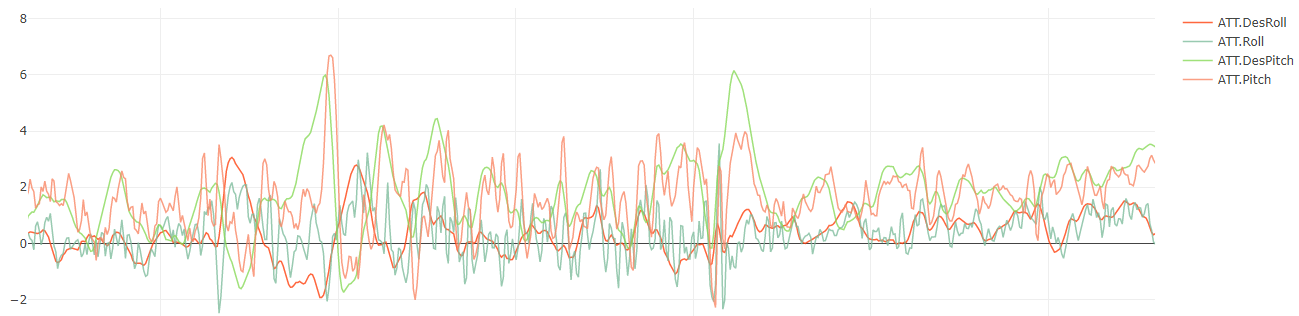
During descent control is finally lost, probably due to Pitch P term being too low and MOT_THST_EXPO being too high.
Any reason why ATC_ANG_RLL_P and ATC_ANG_PIT_P are so different? Is the craft not symmetrical?
Let’s set them the same anyway, in the interests of testing:
ATC_ANG_RLL_P,6
ATC_ANG_RLL_P,6
Your Vcc (5 volts to the flight controller) is low, around 4.78 while armed. I would definitely do something about this before there is a brownout and rapid return to earth. You need about 5.2volts.
After you’ve made all those changes, do a hover test for a minute or two, then some gentle flying around, no need to test extremes. Post the link to that .bin log file.
1 Like
@xfacta its a quadcopter. I am going to fly the copter tomorrow and will share the log after flying.
@xfacta @dkemxr @XinChengGe I have flown the drone, Now its performing better but after few flight suddenly, in my last flight i did a takeoff command and the drone started oscillating. After which i did the RTL it landed harshly.
After this flight, I rebooted the system and done flying 2-3 times and it was fine. I am not able to figure it out what had happened in that flight. I am attaching log of that flight below. Need your help in that
https://drive.google.com/file/d/1aAdoRiEpo6MbuwNwH0m5ebZdluxc2X6E/view?usp=sharing
The tune on this craft is terrible; I wouldn’t fly it. And why is that? Because you are flying a 24" quad on 12S with mostly default parameters.
Do some homework:
Initial Tuning parameters.
Use of Mission Planners Alt>A plug-in
Configuration of the Dynamic Notch Filter.
Auto Tune.
Then when you have done all of those things and there is a problem with Flight Stability come back for help.
@dkemxr I have tried ALT>A , auto tune etc and lead to crash 4-5 times. That last crash log is mention here below
https://drive.google.com/file/d/1tyuDnduCZclx1FfM8C-Kbcx6lukdm1mT/view?usp=sharing
then tried few more times getting same results, then i reset the complete parameters and changed only thrust parameters fly almost 16-17 flights but suddenly in one flight i got this oscillation while take-off.
After that also i have taken 5-6 more flights but i did not know the reason.
Is it due to tuning or is there something else because in last 24 flights it happened once which is making me to thing what has happened ?
.
I just finished tuning a 12S 24-inch prop quad. Sporting T-Motor Alpha 60HV correctly reprogrammed for the MN701S they power. And with a correctly-weighted aluminium slab instead of the intended gimbal and cameras.
I did two 30-second hovers for FFT analysis, one with the gear down, one with gear up. I set both fixed and dynamic notch filters and started autotune. I did a pitch autotune, copied the params to roll, then a yaw autotune. Then a three-axis autotune, followed by a couple more of roll autotunes, because I didn’t like the results and craft reaction was a bit lazy on roll.
Now it’s sharp and flying well, but I’ll probably save the PIDs and try a couple more autotunes to see if responsiveness improves.
Today also I tried another set but it was flying fine when you was using Rc remote in all manual and auto mode.
But when i took off the RC receiver and added a joystick and enabled it in mission planner , in the next takeoff the drone toppled, which was fine in last flights with Rc remote.
I am stuck at this