Hello everyone.
I have a problem when frame started to landing.
frame : Octoquad
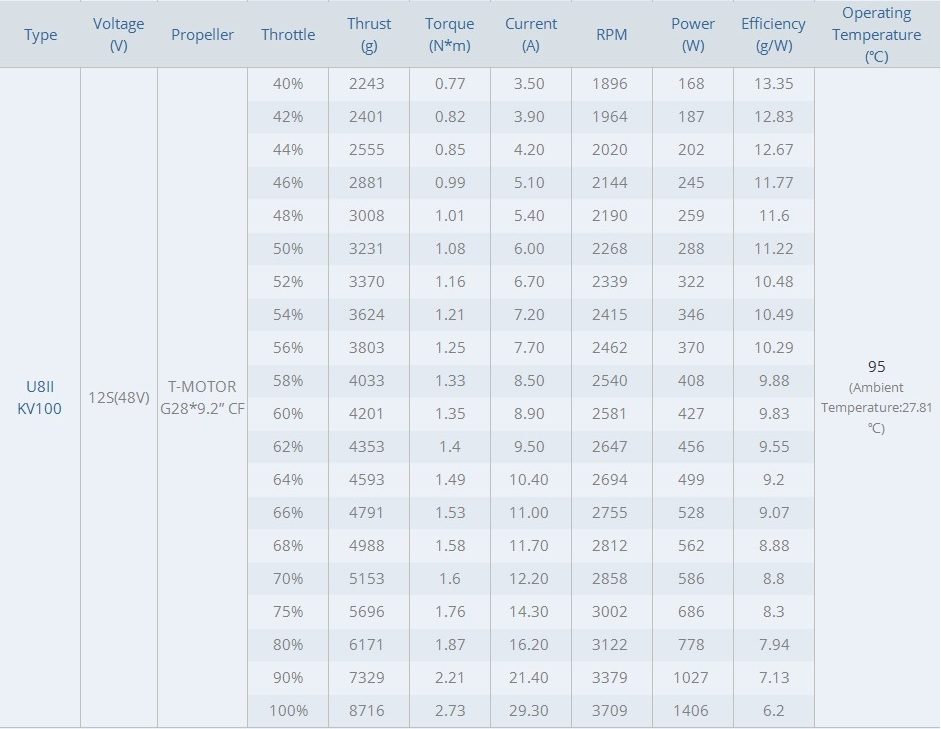
motors: T-motor u8ii 100kv (12S)
ESC: T-motor alpha 60A HV
prop: 28 inch
battery : 22000mah (12S)
pixhawk : CUBE
Drone total weight with payload : 13Kg
Hover current : 30 ampers
I can takeoff and climbing to 400 meters successfully, also I did auto PID tuning two times and frame fly very stable. But octo start to descend fine at AUTO mode but then start oscillating at about 200 meters. i saw that when the wind starts to blow , oscillation starting. i saved octo as switched to ALTHOLD mode.
i guess, big propellers are more affecting by the wind. (Just an idea)
gust winds was 7 m/sn at test hour.
WPNAV_SPEED_DN : 1.5 m/sn
I changed ATC_THR_MIX_MAX to 0.8. result was more better but issue happened again.
after, I changed atc_THR_MIX_MIN to 0.18, oscillation didnt start again.
after this parameters adjusting, I increased WPNAV_SPEED_DN to 2.0 m/sn. oscillation started again at 300 meters.
here is video: video
Why i can not descend stable ?.
another problem is octoquad current consumption more than it should. i know OCTO frames are less efficient than normal frames. But mine is more bad.
Hi @chris_pilot
i didnt ever build a copter in this size but i think bad PIDs could make this problem while descending
i was saw this problem by a 650 size copter with 800kv motors
but i think @mboland could help much better
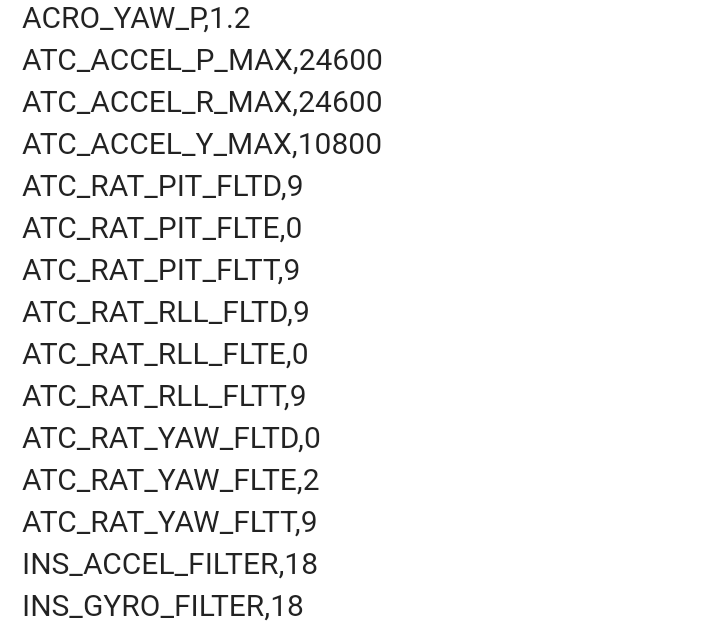
Hi @hosein_gh. But the drone’s movements are stable at althold and loiter mode. You can see at logs. Also i tuned ATC_ACCEL_P_MAX, ATC_ACCEL_R_MAX according to arducopter advanced tuning.
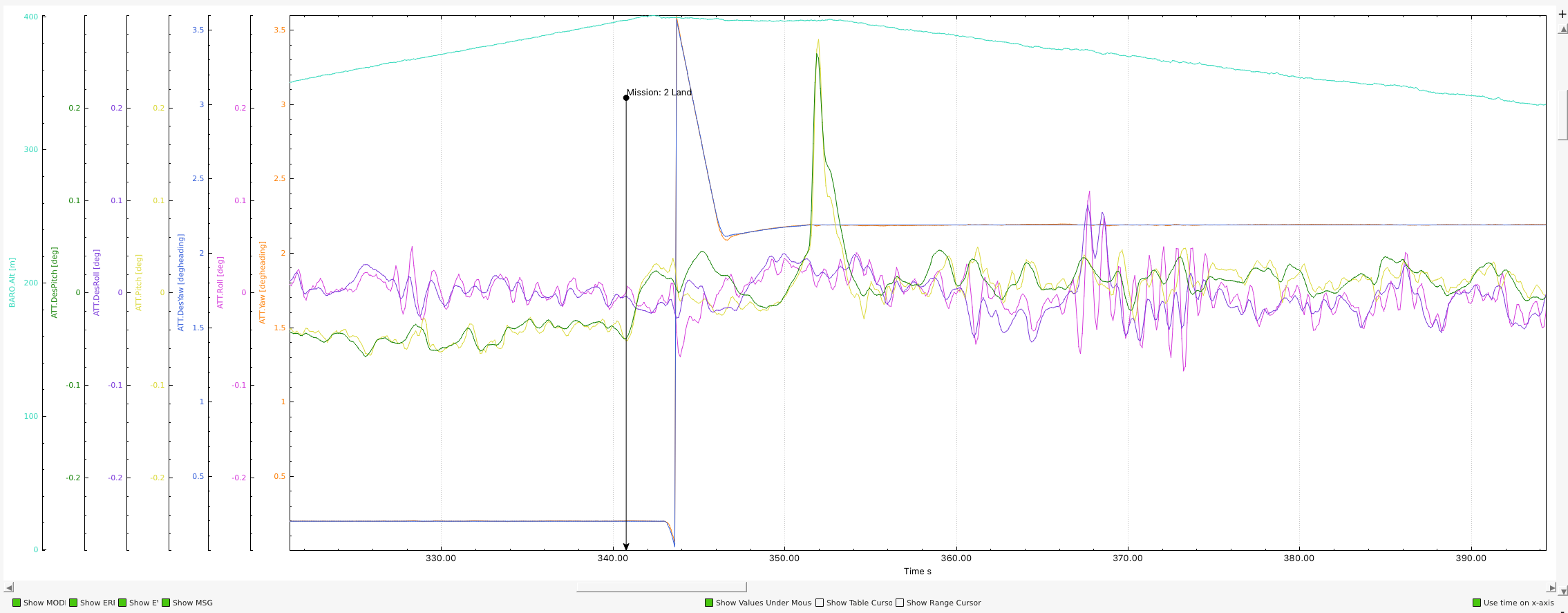
Looking at the log, the copter is very tightly tuned, a bit too much, and as you descend into your own ring vortex, which will always cause some instability even on the best tuned copters, it is pushing you over the top into an oscillation.
You can see it going into oscillation here as it descends.
I would start by lowering the INS_ACCEL_FILTER to 10 and then follow the tuning Wiki here followed by an autotune.
The oscillations you see in the graph in normal flight you are not noticeable, except that they are consuming power. This will be the source of your excessive current consumption.
Thank you so much @mboland.
My autotune aggresive value is 0.075. do i change to 0.05 ?
There was gusts wind 7m/sn , i think that reason of normal flight oscillations.
Always i looking of advanced tuning document.
Here is my advanced parameters.
I would always start with the lowest autotune aggressiveness and work up from there.
Monitor your Desired v Actual in the logs and you will be able to see the results.
If you look at it now you can see how hard the motors are working and that means more power is used.
Although there are recommendations for INS_GYRO_FILTER in the tuning wiki INS_ACCEL is not mentioned.
I have always set both to 10 to start with on larger copters.
Maybe INS_GYRO_FILTER at 18, is a better value being a recommended value from the coders.
The best way is to test and evaluate for yourself.
Thanks for answer @OldGazer. You mean problem is not about any parameters ?
if so , what do you suggest for solution ?
Because wind speed actually was not very high. Always drone can crash at like calm weather.
[quote=“mboland, post:4, topic:60563”]
I would start by lowering the INS_ACCEL_FILTER to 10 and then follow the tuning Wiki here followed by an autotune.
The oscillations you see in the graph in normal flight you are not noticing, except that they are consuming power. This will be the source of your excessive current consumption.
[/quote].
For what its worth, I have never seen this with my large aircraft, but I have seen it with smaller racers and some toy grade quads. In both cases the “trick” is to establish your descent with some “glide angel” so the aircraft is moving away from the prop wash.
Hello, i think an octo with 28 inches props and an auw of 13kg will always be a nightmare to tune, no matter what you do to it. The combination of slow turning motors and big inertia props is a killer and is expecially visible whenever even a little wind is present.
You have an hovering throttle of 0.2 and is too low.
What i would try is to change props to smaller ones, you could try with 22 inches and see if gets better, doing so you’ll probably loose some efficiency.
I think you missed it too, prop wash is only the sympthom of another problem not the problem itself
Obviously going trough perturbated air can make the copter oscillate a bit but it should be perfectly able to withstand it with no probs if the rest is ok.
thank you @Corrado_Steri. yes hover value is very low but it will carry 3 kg payload camera after tests.
you are right. little strong copters are much more stable at difference in various weather conditions.
But i cannot change props because this motors not compatible with 22 inch. Also, i spent all of my money to this motor and propellers. i need to solve this problems. I guess I’m actually not the first person to build a drone of this size. how did they solve this problem , i dont know.
Than i don’t know how to help you. Every time i tried that route i failed miserably. I think there is a limit that if crossed you’ll end up with an unstable aircraft, no matter what you try. Really hope to be wrong and you can succeed where i miserably failed
The 3kg payload will make things better but i am afraid it is not enough. Maybe 10kg payload would do the trick
My advice is still to try the smallest props you can fit on your motors and see if things gets better.
Just to make my toughts a bit clearer, it is not the size of the drone the prob. The prob is that you have too big props for a 13kg aircraft.
We have a quad that weights 25kg and spins 32 inches props, we fly it everyday and has absolutely no probs.
I agree with the hover throttle being too low. One big downside is the lack of resolution between full low and hover throttle. The second downside is prop speed vs control authority and reaction time.
Again, hovering throttle is not the cause, it is a symptom of the drive train not correct for the weight of the aircraft. Your Combination of Weight, props and number of motors is wrong, we can discuss it all day long but it will not make it any better.
Solutions (choose one):
1 Smaller props (prob i’d try 22 inches if you can find any that can work on U8ii maybe with an adapter)
2 Take off 4 motors and make it a quad (that is probably what i would do)
3 add 10-15kg payload
As i see it you don’t have any other options to make your aircraft a good flyier.