Unless you have measured the thrust vs pwm yourself I would stick with the defaults.
You need to use the motor test and decide what is a safe minimum thrust for your aircraft.
This can also happen because of other bad parameters as I discussed above. It can also happen if you let the aircraft move too much and build up airspeed even if there is no wind.
Autotune measures this and sets it to the most aggressive value so you should reduce it back to 24000 after autotune is complete.
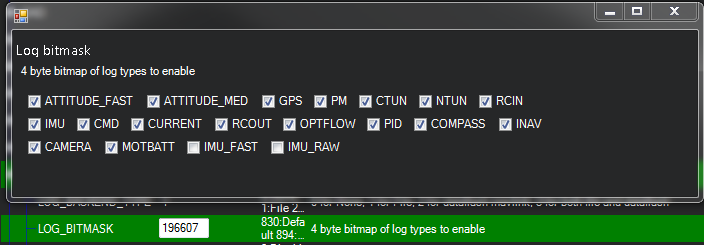
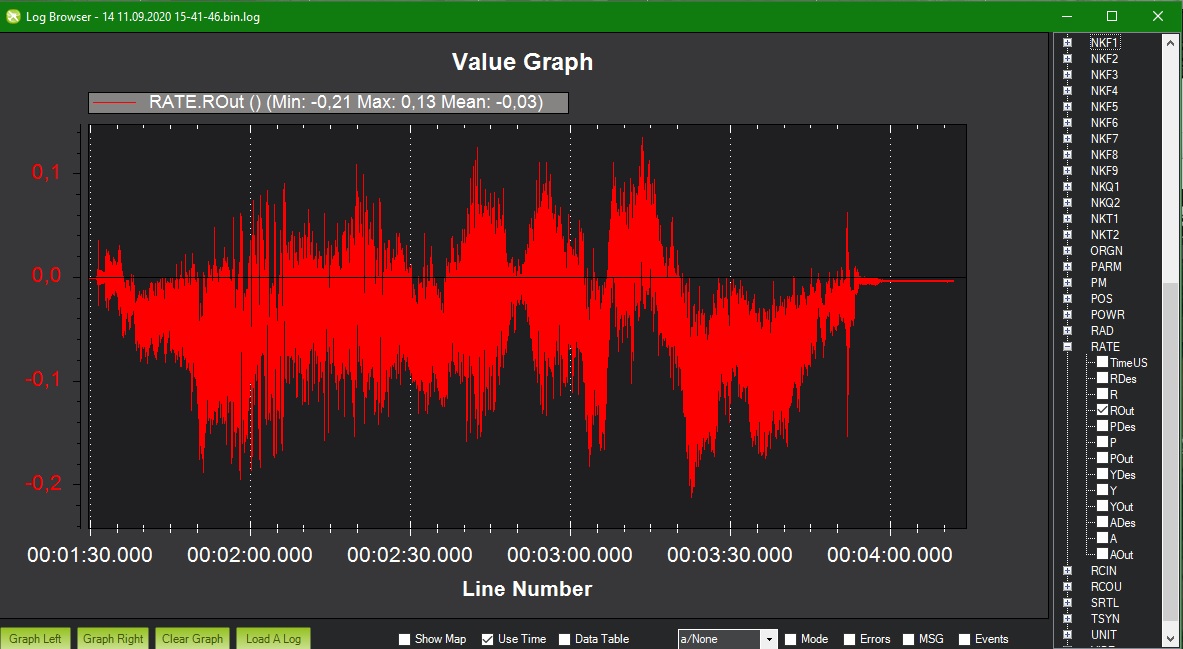
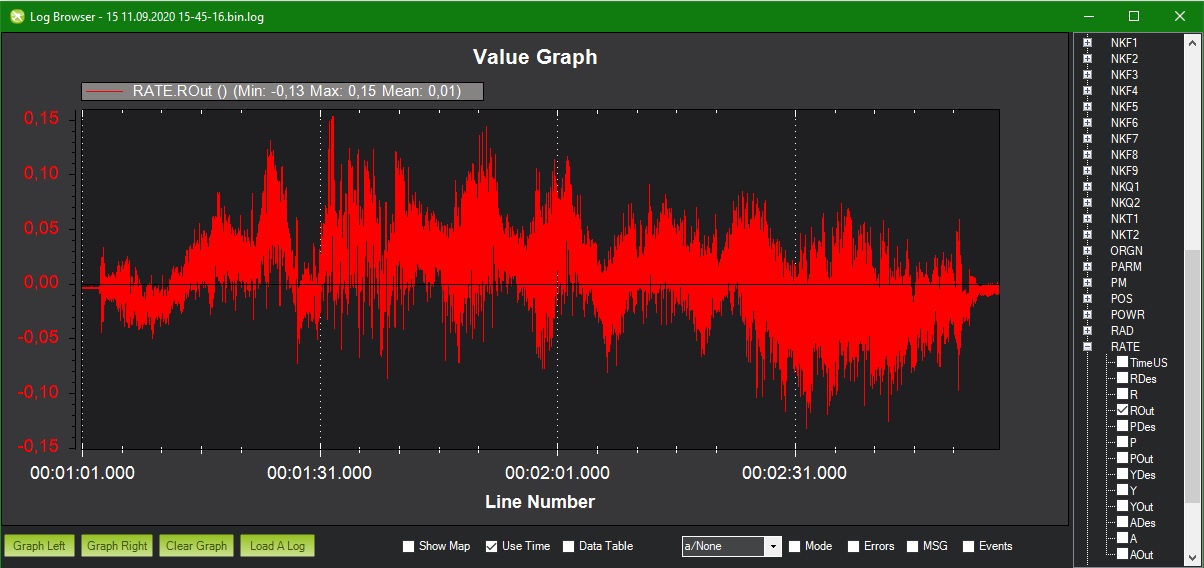
Look at the noise on the RATE.Rout, Pout, Yout, and Aout with fast logging enabled in the log bit mask. If you see more than 10% when you zoom right in close then it is probably too much noise and you need to reduce your filter settings.
This is a difficult question to answer but generally a well tuned multirotor can fly in any wind up to its maximum airspeed. The trick is landing without tipping over. The callisto aircraft above can easily fly in conditions up to 60 km/h winds but will be blown over when sitting on the ground between 30 and 40 km/h. So the real question is what wind speed are you able to take off and land in and reliably NOT tip the aircraft over as you shut down or spool up.
VTOL is much harder as it depends on how the wing is set relative to the quad and the amount of control that is achieved with the quad motors. In general it is difficult to land a VTOL in winds higher than the stall speed of the aircraft. I was producing a VTOL based on the X8 and was able to take off and land in 30 km/h winds but had to turn the aircraft sideways to land because the aircraft could not descend when facing into the wind.
In general a well built, setup and tuned aircraft can fly in conditions much worse than the operators are comfortable putting it up in.
Hello Leonard, this post is really gold. I am sorry i gave bad advice but for me tuning a light big prop quad has been a nightmare. Hopefully with your suggstions it’ll be better, i’ll go back to my big copter and retune following your advice to see if i can get better results.
One thing, i do not have RATE.xOut, i only have RATE.Yout, do i have to enable some special logging?
Ok i got it now, X stands generic for R,P,Y…i guess i am a little slow in the morning
Mate, absolutely not! It is people’s willingness to try to help that makes this project so good and keeps the developers working to do better (and the ideas of how to do better).
Again, you are very correct here. This is because the motors tend to be smaller (lower torque), the props tend to be larger with higher inertia and more efficient (less drag). Then if you add ESC’s that don’t have strong breaking you are really pushing hard to get a good tune.
Yeh, I am going to stop saying that. The x is for the R, P, Y, A. I should just write RATE.ROut, RATE.POut, RATE.YOut, and RATE.AOut.
Oh, crap. I just read the end of the post and realised you said exactly that
If I but the Copter on a scale, and slowly increase the throttle until the scale shows 2/3 of the resting copter height, would you say that is a “safe minimum thrust” ?
If I autotune in ALT_HOLD mode, does the autotune routines require GPS? I would like to try this indoors.
Hello @Leonardthall. lastly, what value do you prefer ATC_THR_MIX_MAX and ATC_THR_MIX_MIN
for 28 inch props ? actually do you have a suggestion about this ?
They are not propeller dependent. The defaults are fine unless you have issues with stability during breaking. It can help then to increase ATC_THR_MIX_MAX to 1.0.
INS_HNTCH_ATT,40
INS_HNTCH_BW, (2/3) * INS_HNTCH_FREQ
INS_HNTCH_ENABLE,1
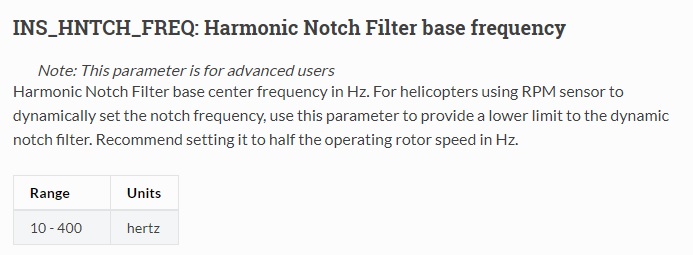
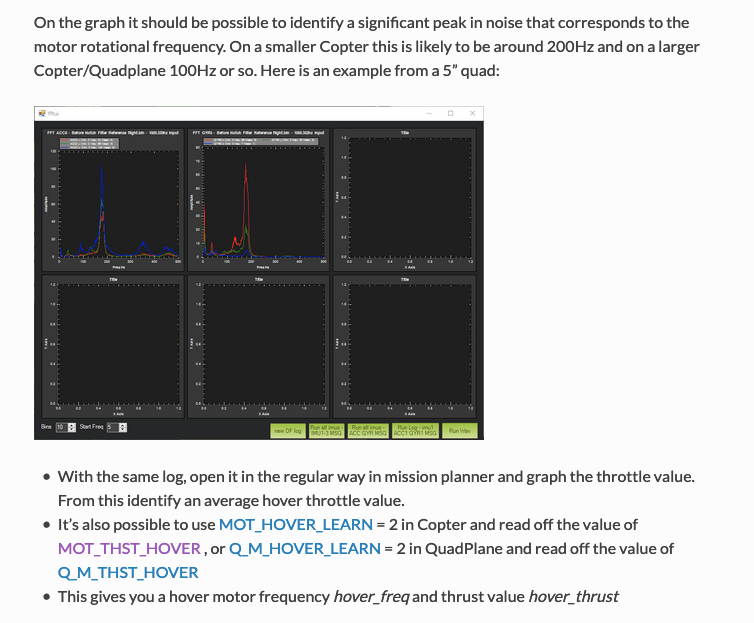
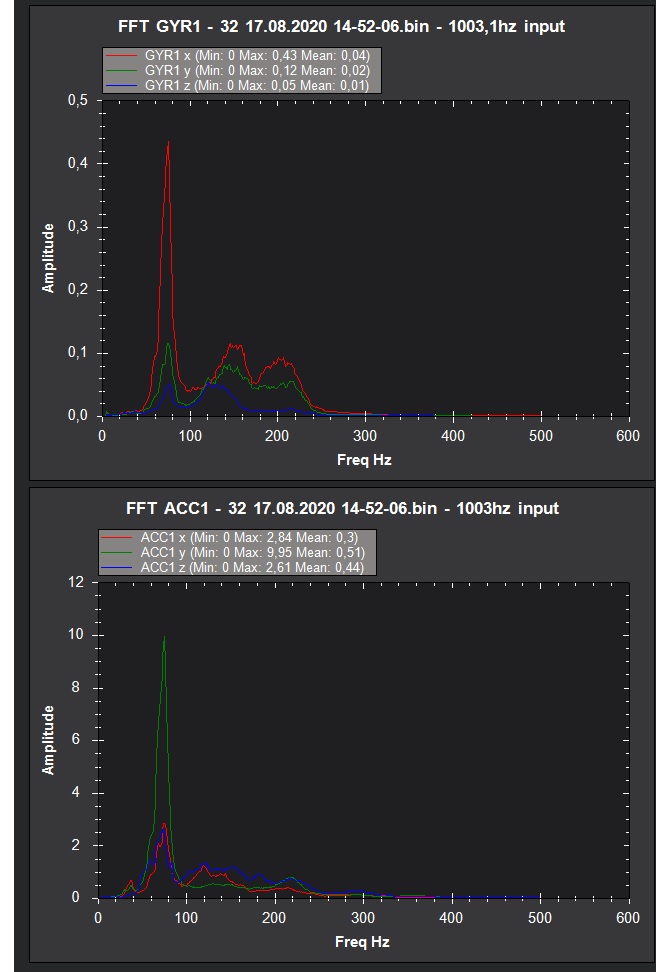
INS_HNTCH_FREQ, measured from batch logging
INS_HNTCH_HMNCS, Your main harmonics, should be 3 for you
INS_HNTCH_MODE,1
I couldnt figure out how can i decide INS_HNTCH_FREQ. So, drone doesnt have a rpm sensor.