Hello
my name is yuri i am from ukraine, my professional is a car painter, i have been painting cars for 20 years. but my hobby is fishing, there is a rubber boat, boat, fishing rods and everything you need. and ph I decided to make a gps anchor to keep the boat on the current. I made such a device.
at this point, I have installed ardurover 4.0.0 in microcontroller open pilot revolution. I installed the Mission Planner program on my computer.
but I don’t understand what to do next and how to set it up. everything is very difficult, probably because I am no longer young.
if it is not difficult for you - help to set up the controller to use the mechanism on the bow of the boat.
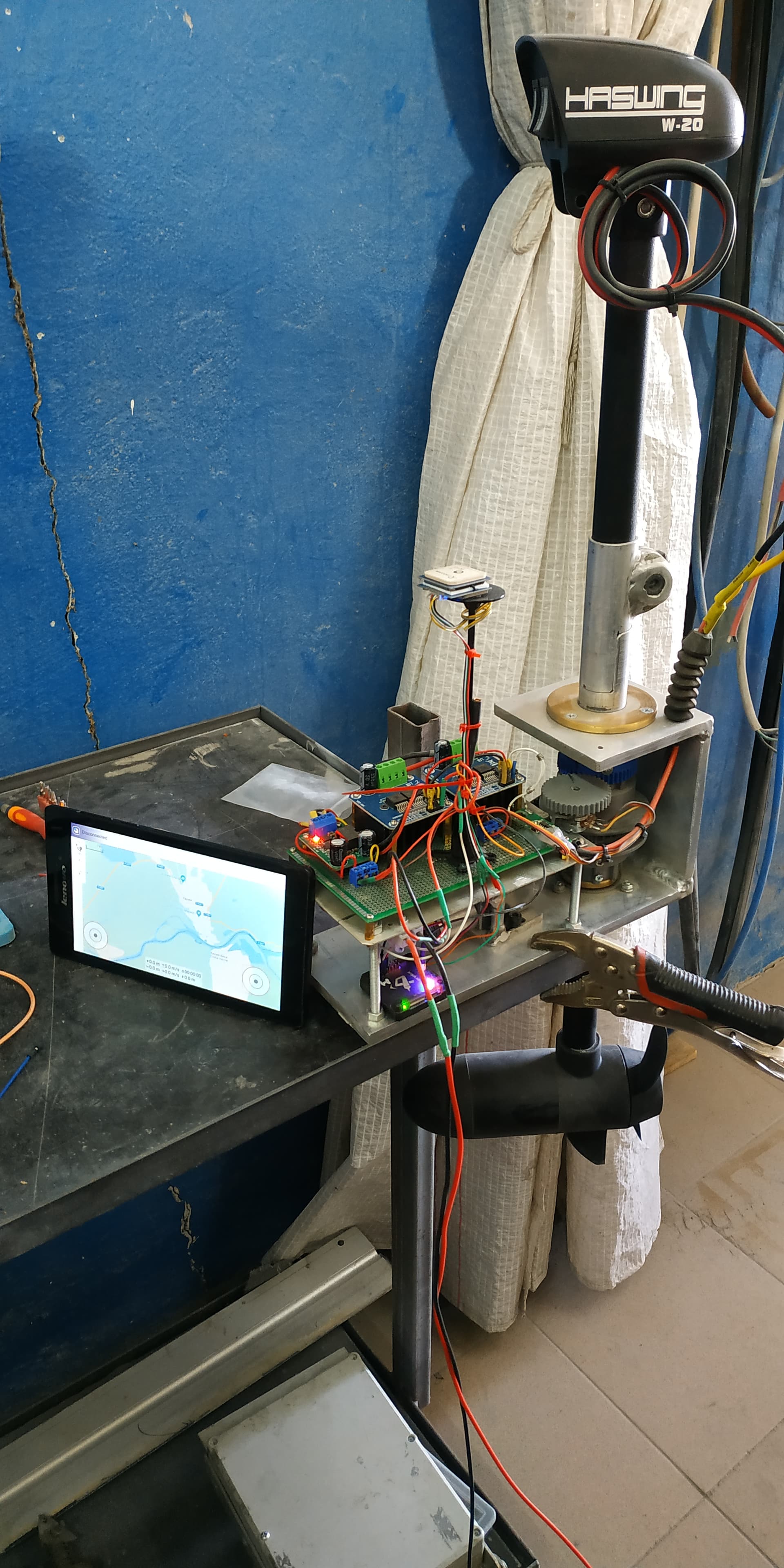
there is a main engine, and a steering one.
your help will be very useful, since I did not find an understandable manual on the Russian Internet.
if possible - help as for a beginner, how to configure the controller in stages
thank you very much
Hello
I appeal to
Randy Mackay. please help with setting up the matek f405 wing controller. I’m ready to learn, but I need a controller tuning algorithm. please, please write on the points that need to be configured and I will study. I understand that you have little time, but I have no one to turn to. I promise to study and write an article on setup, with a link to your community. I continue to do the mechanics in the same way
As for how to properly configure Ardurover so that the system is able to maintain the position. I would recommend you to carefully follow step by step the “First Time Setup” guide on the ArduRover wiki.
After everything is correctly configured, you only need to put ArduRover in “Loiter” mode and it will be able to maintain position.
If during the configuration process you encounter any more specific complications do not hesitate to ask here, we will be happy to solve these questions.
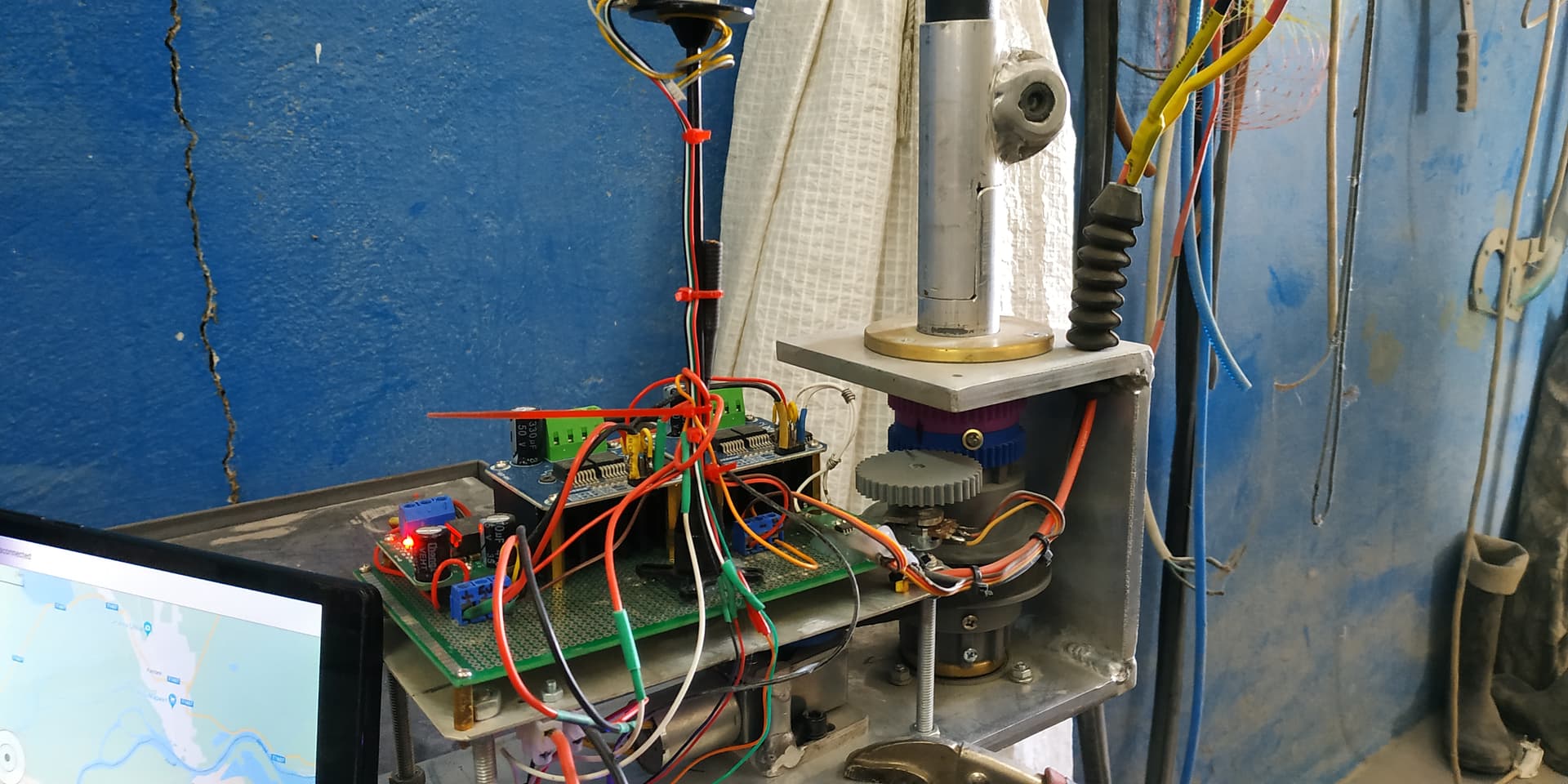
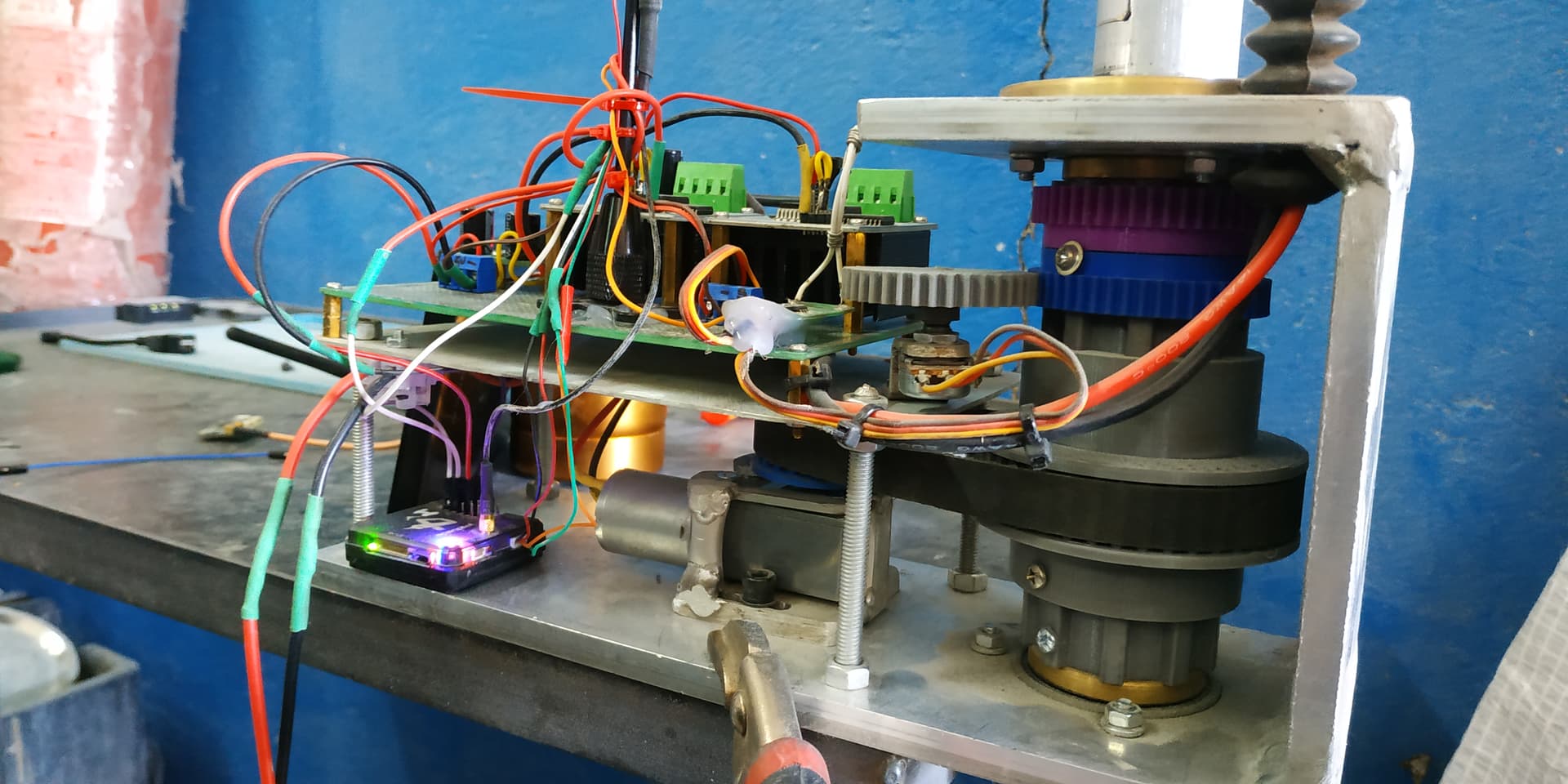
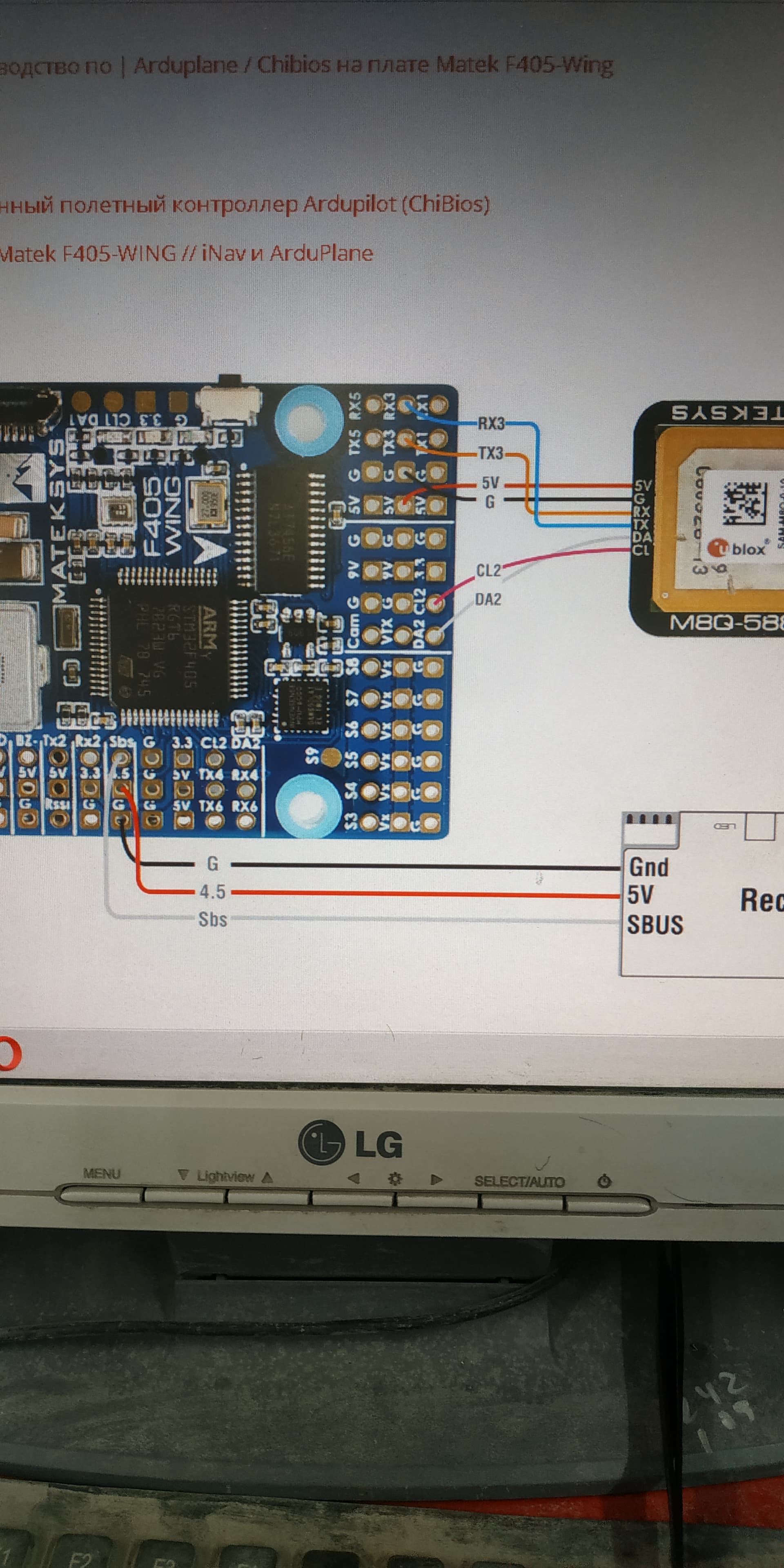
I understand everything about the mechanics. but with the electrical part there are questions. in the photo below, I have already connected gps and radio control as in the manufacturer’s photo
I will continue
kindly tell me:
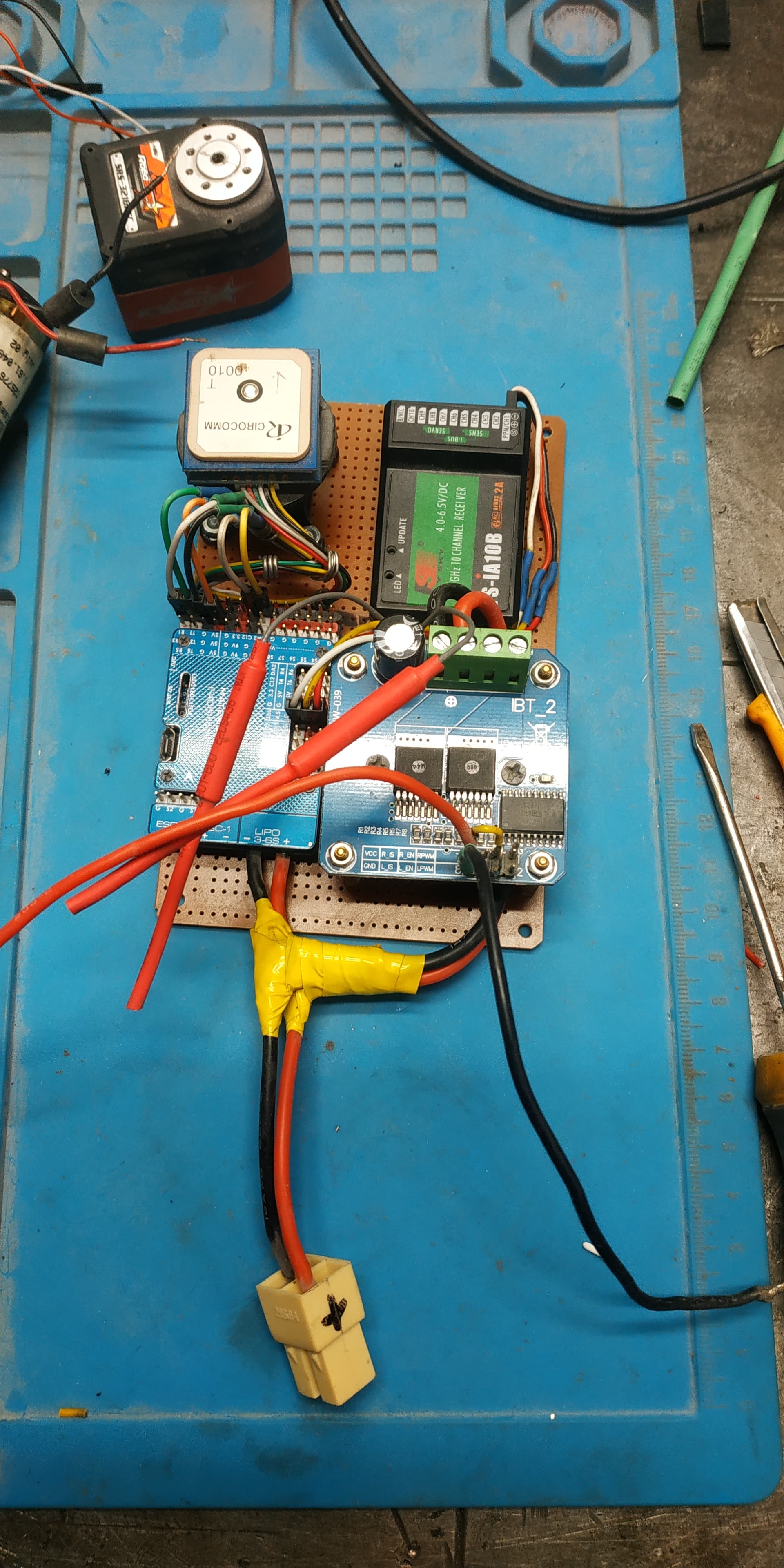
1 in which connector to connect the steering servo
2 in which connector to connect the main motor control driver
3 in which connector to connect the bluetooth
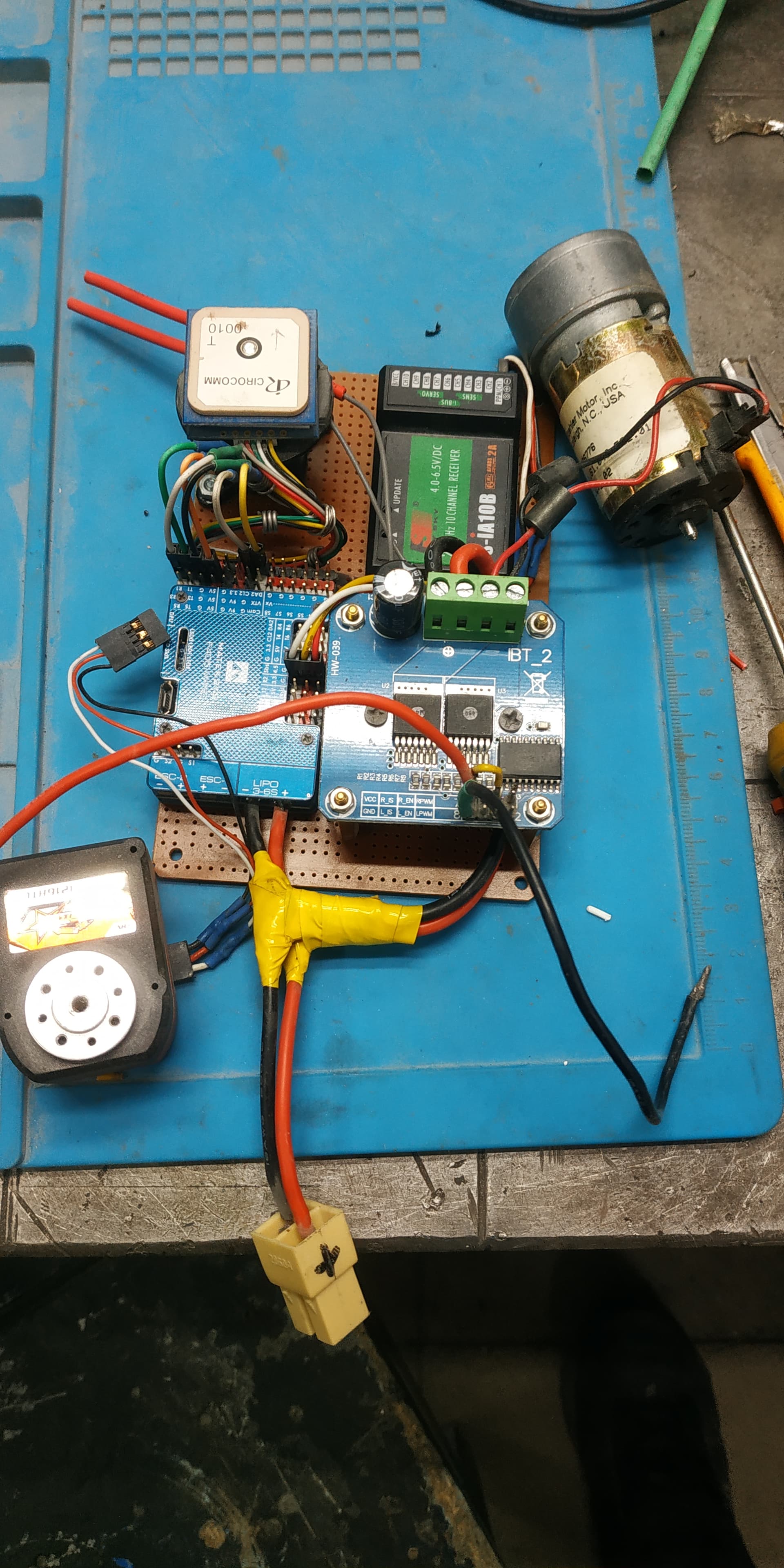
I connected all the details, everything functions except for the driver of the main engine.
if you connect a servo instead of a driver, then the servo is functioning … who thinks about this?
configured the settings, but there is a problem with the configuration
in line 8 -BRD_SAFETYENABLE, 0 - there is no such option, there is BRD_SAFETYOPTION … is it the same thing?
there is also another question.
when activating the LOITER mode, I do not move the model, but on the map it shows me the deviation from the point! …help me solve these questions
под этим видео есть ссылка на настроки лодки, но эта лодка с двумя двигателями, а у меня один управляющий двигатель, второй главный.
Randy Mackay сказал что для моей лодки лучше такое управление Vectored Thrust — Rover documentation …
Что я должен сделать? - загрузить настройки что дает Рэнди Маккей, и уставновить Vectored Thrust … правильно?
No is the short answer.
It mostly provides additional safety in case the primary unit doesn’t provide good / healthy data stream.
The high position accuracy is linked to the response time of the controller together with the power available to quickly move vehicle. (In your case a boat) - This remark is based on the assumption that a good & healthy signal is provided by the GPS unit.
( I think the issue in your case is if you have a fast moving stream,…let’s say 8km/h flow rate and you have an outboard motor only capable of providing a speed of 6km/h under ideal circumstances then it won’t work as there isn’t enough power (speed) to compensate. )
…but I do like your project,…and I’m not even into fishing.
hi all
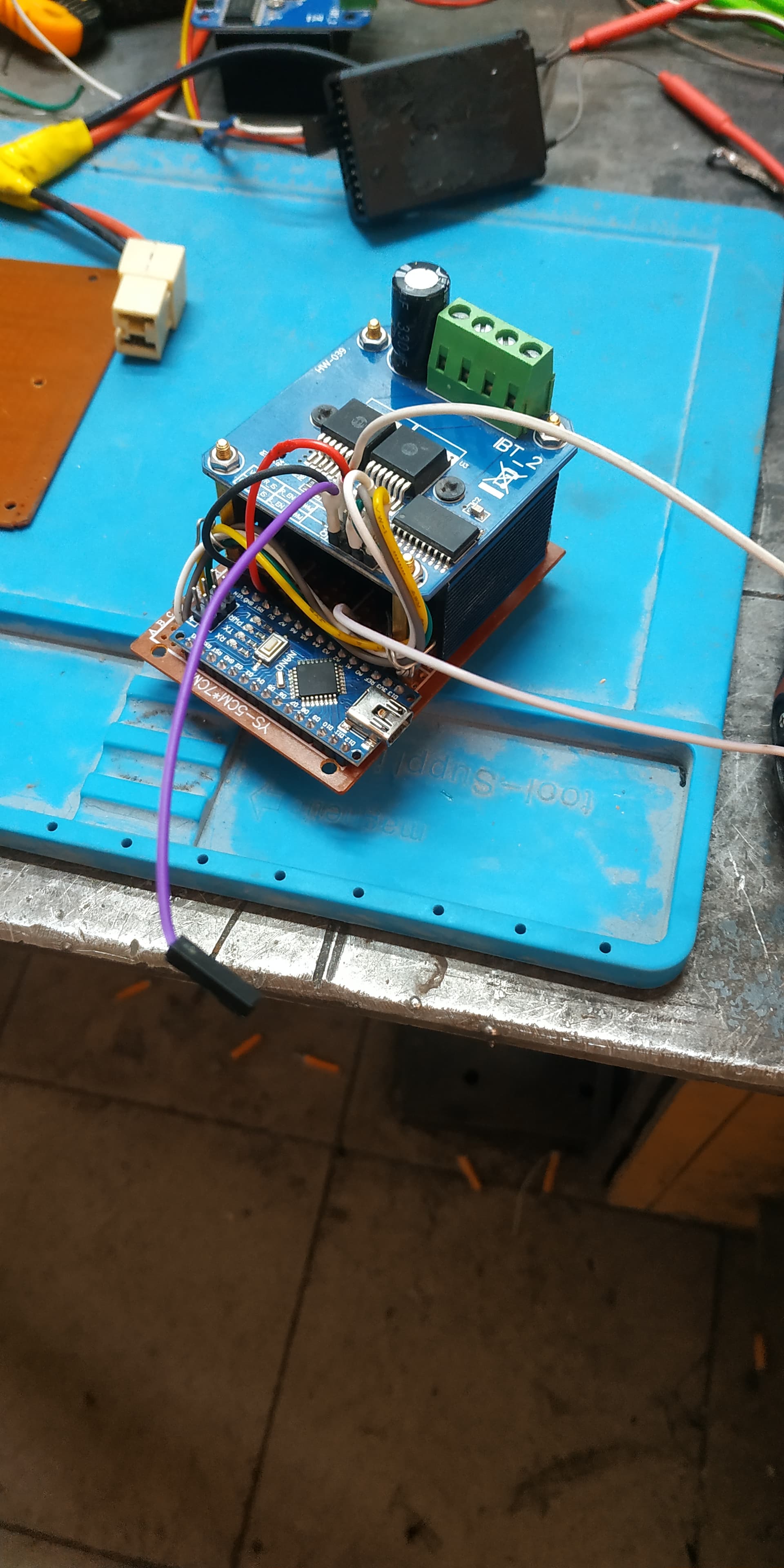
again made another anchor device.
please tell me where the smoothness of the servo rotation in manual mode is regulated in the program. the video shows that the servomotor turns too sharply
Thanks
Your project is impressive, Yuri! It’s great to see someone with a passion for fishing and hands-on engineering working on a GPS anchor system. Since you’ve installed Ardurover 4.0.0 on the OpenPilot Revolution and are using Mission Planner, the next steps involve setting up your parameters, calibrating the motors, and configuring the steering system properly. First, ensure your firmware is correctly loaded and the controller recognizes your motors. Then, go to the “Initial Setup” tab in Mission Planner, perform the accelerometer and compass calibration, and set up your radio controls. You’ll also need to configure the “Throttle” and “Steering” output channels under “Servo Output” to match your specific motor setup. It might seem complicated, but taking it step by step will make it manageable. Just like learning to handle new fishing rods, getting familiar with Mission Planner takes practice. If you need specific help, I can guide you through each setting in detail. Let me know where you’re stuck!