NeilD
April 26, 2022, 6:04am
1
Hi Folks,
I am moving from an ESC setup for a skid steer boat to trolling motors (from brushless to brushed motors).
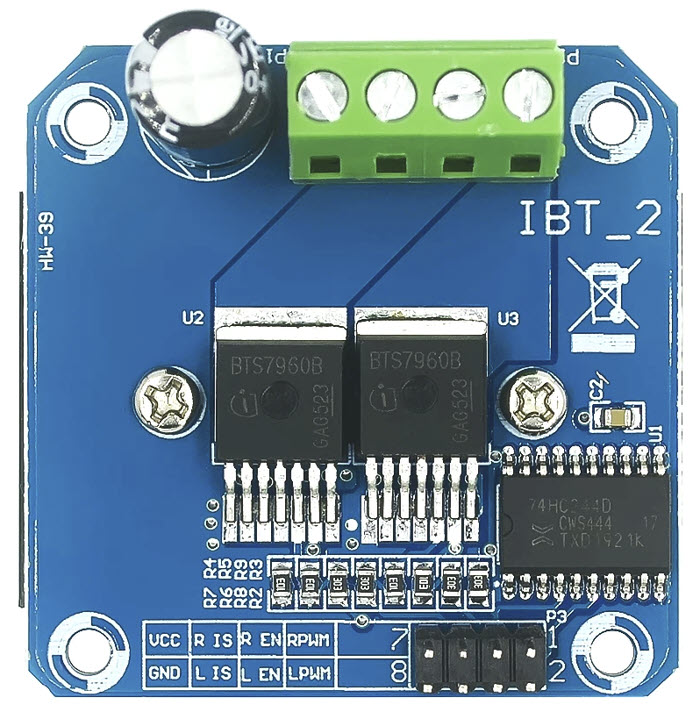
So I now have a pixhawk 2.4.1 and 2 of these
But I cannot find any useful info on how to wire them to the pixhawk.
This page https://ardupilot.org/rover/docs/trolling-motor.html tells me it’s possible but is useless for which pins are used for what.
So for each motor I have the 3 pins in the back of the Pixhawk (-) (+) and (S) on outputs 1 and 3. and I have set the SERV01_FUNCTION and SERV03_FUNCTION to Steering Left and Steering Right and MOT_PWM_TYPE = 3 (BrushedWithRelay).
But I do not know how those pins should be wired to the 8 pins on the bridge drivers.
Can anyone point me in the right direction please?
ta
NeilD
April 27, 2022, 12:40am
2
Never mind folks. I’m giving up, following advice in other posts here and ordering 2 of these https://www.amazon.com.au/YoungRC-Brushed-Motor-Speed-Controller/dp/B07L2T6MHB
yuriy22
April 27, 2022, 6:06am
3
this driver can only be connected with arduino. flash the arduino and it works great. see photo below
I decided with the driver - I connected it to ardu nano, uploaded the sketch, and it all worked!
[IMG_20220425_080851]
configured the settings, but there is a problem with the configuration
in line 8 -BRD_SAFETYENABLE, 0 - there is no such option, there is BRD_SAFETYOPTION … is it the same thing?
there is also another question.
when activating the LOITER mode, I do not move the model, but on the map it shows me the deviation from the point! …help me solve these questions