This question may be particular interest to @rmackay9 and @SIYI
A question came up recently about the ability of SIYI gimbal cameras to geotag images in the image EXIF when they are taken.
As far as I know, the only way to geotag images taken with a SIYI gimbal camera is to use the geo-tag utility in Mission Planner.
For a mavlink controlled camera to record the geotag data in the EXIF of the image, the mavlink message sent to the camera would have to also contain the geolocation data.
It’s possible for EXIF data to also contain roll, pitch and heading data - and Mission Planner geo-tag utility has this data available.
As reference - drones such DJI products contain all this geotag data - and the EXIF fields that it uses are an extension to the standard EXIF fields.
I was given a link to a MP4 file uploaded google drive that appears to show the Siyi A8 mini achieving geotag data in the EXIF when a picture is captured.
There’s no sound (not that I can speak Chinese) and the messages displayed aren’t very informative.
It would be helpful to know if ArduPilot sends geolocation data to a camera along with the Mavlink message to take a photo. If it does, then I’ll do some testing with my Siyi A8.
Thanks!
ADDENDUM:
If a camera were to be “listening” to the Mavlink data stream, a camera could simply use the most recent Mavlink geo-locatation broadcast to geotag an image in the EXIF. I don’t think it would be very accurate - but it might be better than nothing. And I don’t know if a SIYI gimbal/camera has the ability to listen to the entire Mavlink data stream - or only gets the Mavlink messages that are directed to it through the UART it uses - and is defined in ArduPilot for this purpose.
Yes, as long as the Siyi camera is setup according to the AP wiki it should be using the Siyi serial protocol and AP sends the vehicle’s location and attitude to the camera gimbal and with recent versions of the Siyi camera gimbal firmware, images on the SD Card have the correct EXIF location data. Sadly they don’t include the vehicle’s heading so I normally force the vehicle to be facing North.
P.S. I think perhaps the Siyi setup docs also include instructions for using a MAVLink interface but we strongly recommend following the AP setup instructions which uses the Siyi serial interface.
It will be interesting to see how much delay occurs between the Mavlink shutter command and the actual exposure.
With my Sony cameras at about 7 meters per second, I recall seeing a position error of a few feet. (Hence the need for RTK)
In fact, using the Hot Shoe to log the geolocation data, this is improved considerably - even without RTK.
Maybe @SIYI can add this to potential future projects. Interestingly, the FoxTech Map02 which uses the Sony a5100 “internals” provides a “hot shoe” lead, even though the Sony a5100 doesn’t have a hot-shoe. So maybe @SIYI can engineer something. It would certainly be competition with the DJI drones offering RTK.
We are currently working with ADTi to integrate their powerful mapping camera series with SIYI ecosystem, stay tuned!
And we already got some progresses
Randy, the SIYI does not capture geotagged images when setup with the SIYI/STORM32 gimbal serial protocol as described in the AP wiki link you provided. Using the post flight geotagging tool in MissionPlanner “works” with a lot of processing to properly align each image with the correct CAM trigger action. Saying this is a pain in the you know what workaround is an understatement of the century.
On the other hand, setting up the gimbaled camera system as you describe SIYI recommends, using the Mavlink interface, results in no control between the FC and gimbaled camera.
I have been going back and forth with SIYI for the past few months, getting help from Joe here and there, but it seems like the documentation is conflicting, with neither approach resulting in successful geotagging as claimed by both SIYI and your prior experience(s).
Any further insight or material you could share which could perhaps clarify the proper integration and setup of these SIYI gimbaled camera systems would be greatly appreciated. I would love to help make these SIYI gimbaled camera systems more reliable as quality options for small quadcopters, because very few if any other comparable options exist, but I am not sure what more can be done on our end or how we can continue troubleshooting this issue.
Any chance I could convince you to try AP 4.6 which is nearing the end of beta testing? It’s not yet the stable version so there is a bit more risk of problems than with 4.5.
I tried this last night. Ap 4.7-dev (using an F4 board with custom build to fit SIYI protocol). Needed to update both gimbal and camera firmware for things to appear good in MP messages. Using SerialN_Protocol=8 (gimbal). I did not include the Storm32 gimbal in my included features but setting this to 8 seems to work. Setting MNT_Type to 8 (siyi). I have gimbal control with MP, and can command captures. The images do have a correct geotag. A8 Mini.
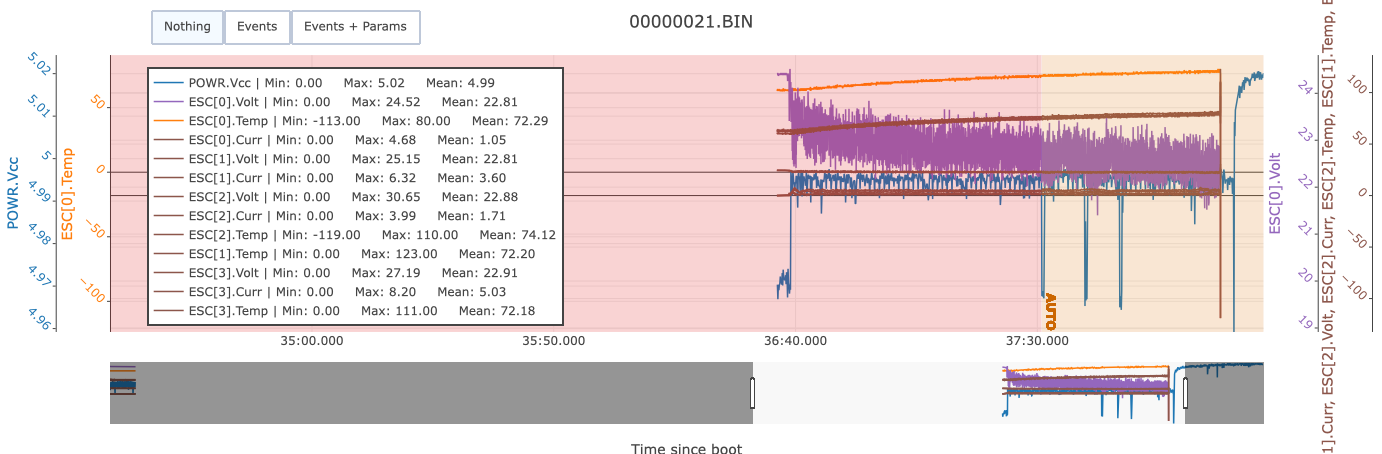
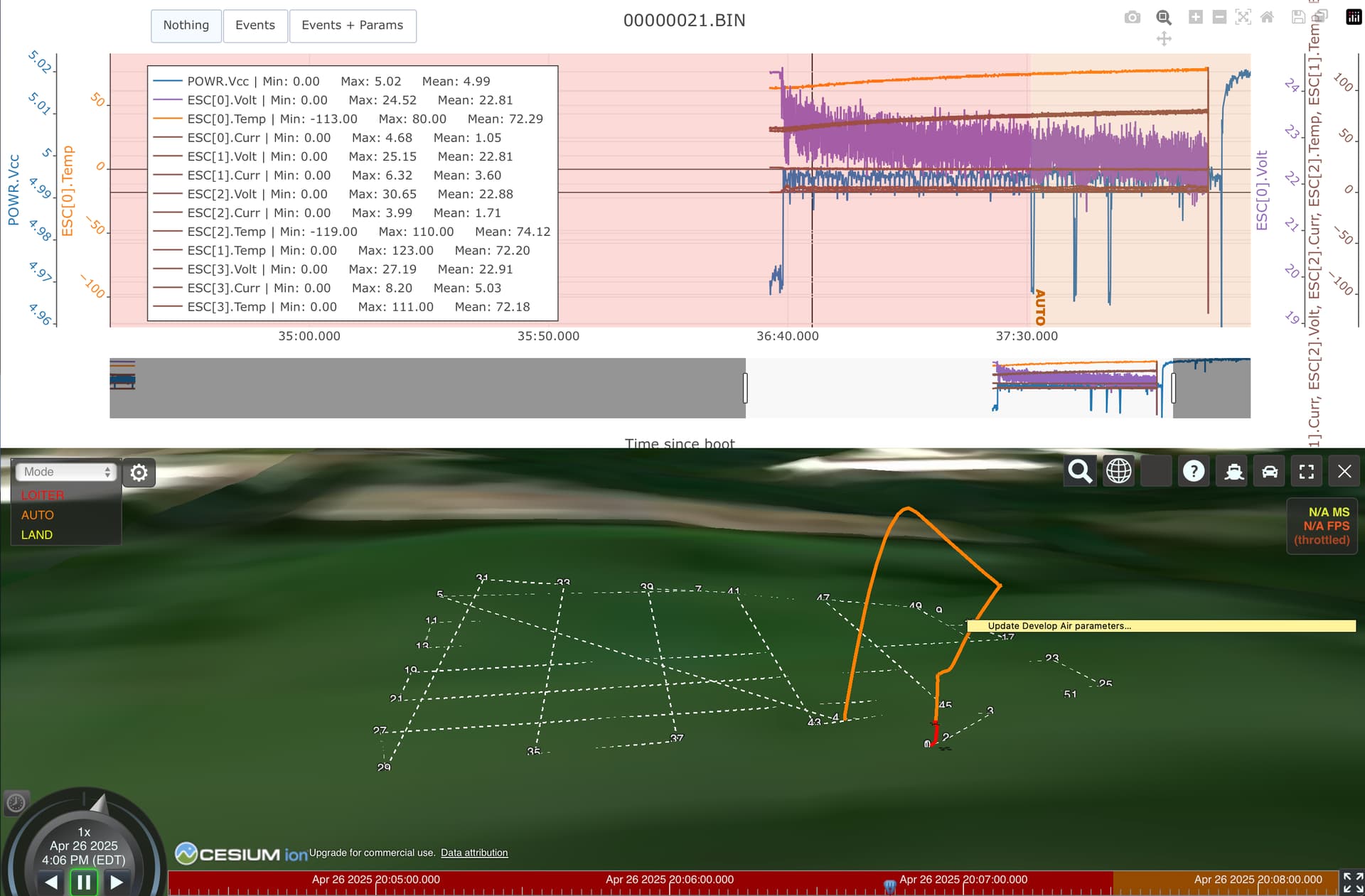
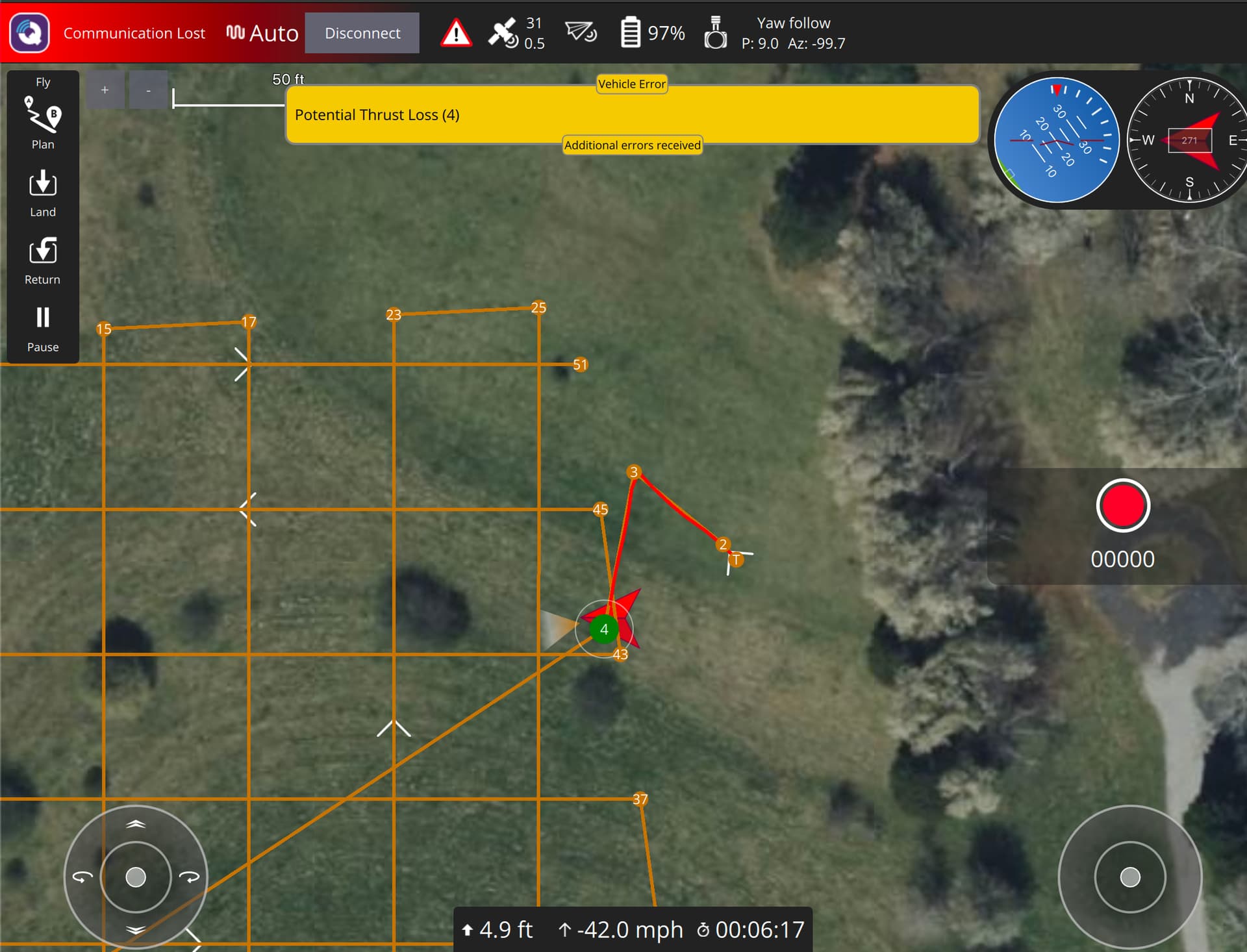
I updated a copter to 4.6 and experienced a sudden thrust loss when attempting a mapping mission with the SIYI ZT6 to test the geotagging functionality. Any help to further interpret the sudden thrust loss would be greatly appreciated. From an untrained eye, it looks like the voltage spiked higher than ideal for ESC 2 since the copter was being powered from a 6S battery, but I am not sure if this alone would be the cause the thrust loss. The temp for ESC 1 reached 123°Ç, which seems much hotter than ideal, but also not much higher than the other ESC temps. Fettec also rates this 35a ESC to operate at temps greater than 100°C.
In any case, I was able to get a parameters file from another copter with a SIYI ZT6 which produces photos with a very wrong longitude, while the latitude is correct and the altitude is as accurate as one might expect without an RTK base station or similar setup. Here are the parameters alongside a log file: HP + ZT6 Params & Log | Google Drive
Is anyone else experiencing the same issue with the longitude being incorrect or is there something wrong with how we have it setup?
After further review, it looks like a soldering joint where the BECs, power connector, and power monitor board are soldered to the main ground pad on the ESC may have made contact with the power pad. This issue aside, the incorrect longitude data issue still persists.
I’m quite certain that the incorrect longitude value is an issue within the camera itself. Could you tell me the firmware numbers on the camera gimbal? There should be at least two of them, one for the gimbal and one for the camera.
Hello! I noticed that your Camera firmware version is v0.1.3, which does not match the firmware version v0.2.3 of Gimbal firmware. You can obtain the latest Gimbal Camera firmware from the official website for upgrading. Firmware retrieval link: https://siyi.biz/siyi_file/ZT6/ZT6%20User%20Manual%20v1.2%20EN%20.pdf
Camera firmware requires the use of an SD card, please note the model of the SD card. Card swipe method reference teaching video: 云台相机卡刷相机固件教程 - Google Drive
… and here’s a Pixhawk6C firmware, @JacobTheIntern could you download and install this version to check it displays the warning? BTW, this is a 4.7.0-dev binary so you probably don’t want to actually fly it, just a bench test should be enough.