Hey!
So i’m trying to glide from waypoint to waypoint. One problem i’ve come across is keeping a solid pitch angle and maintaining a consistent airspeed.
When my aircraft is below the set altitude of the next waypoint, it sets itself to the max TECS pitch angle and attempts to climb (which it cant, because no motor). I could set this to 0 degrees, but I would rather the aircraft prioritize a consistent flight speed instead.
I feared that setting the next waypoint very low would force the aircraft to dive to meet that waypoint, so i decided to use SOAR to see if the TECS airspeed control would be prioritized altitude control, but it’s the same.
Is SOAR required for this? Is it possible to tell the autopilot to not worry about altitude, or set up 2d waypoints?
Ideally i would like to be able to use RTL to return to home, but altitude control is very tightly implemented in that as well.
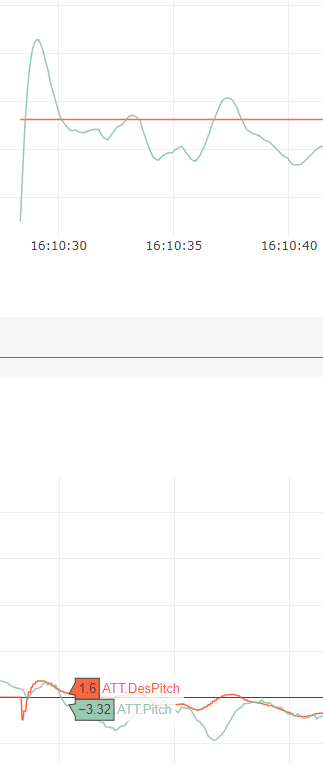
Here’s an example log. in this instance the aircraft ramps up desired pitch angle even before it reaches target alt, i assume because of sink speed or something else. Usually these two are pretty close together.

Here’s a log file as well. There’s two glides in there, first glide waypoint 1 was at 100 meters, rest was at 75. Second glide all waypoints were at 35.
You can plot these at plot.dron.ee.
https://drive.google.com/file/d/1BOVcB_LYRwjvf0muSyLXmteQPGzr4erA/view?usp=sharing