Thank you both. I think I’l either stay with my existing F405-Wing (updated to master last night) or try the Omnibux F4 Nano V6.1 at $30 and quite small. What are the benefits to ArduSoar fans of CANBUS on board?
Kelly
Thank you both. I think I’l either stay with my existing F405-Wing (updated to master last night) or try the Omnibux F4 Nano V6.1 at $30 and quite small. What are the benefits to ArduSoar fans of CANBUS on board?
Kelly
I got my F765-Wing soldered up, installed Arduplane 4.0.5 firmware and Qgroundcontrol 4.0.8. I have flight modes setup, but when I went to setup a soar_enable_ch I couldn’t find it on Qgroundcontrol. As a matter of fact the only soaring option I can find is soar_enable. Is the problem in Qgroundcontrol, or do I need a more recent release of Arduplane?
set SOAR_ENABLE, reboot
That worked a treat. Thanks for the quick reply.
Hey Mogli! i’ve been having the same issue with the controller attempting to nose up, gain altitude and microstalling. How’d you fix it?
I already had TECS_SPDWEIGHT at 2.0. Did you just upload the new firmware Sam made?
Also, @Samuel_Tabor, I have problems updating the cubeOrange from MissionPlanner, i usually have to download .apj’s from firmware.ardupilot.com. This isnt in the latest 4.0.5 stable release right? Is there a .apj i can grab from somewhere for the cubepilot orange so i can try all the new learning stuff out? I’m flying my own design so itt’l be interesting to see what aero data it coughs up and how it compares to what CFD gives me.
Hi ohitstarik,
I have replied in the other thread regarding the glide control, in summary it’s fixed in latest/master.
Correct, it’s not in the 4.0.5 release. Most new stuff is available in latest/master, except the drag parameter learning that is only available from source or in my builds here
Sam
Hi Sam,
After many very windy days (perfect for the slope ;o) , today in the morning we had silent conditions. So I had a second try with your polar-learning-feature. And it seems that it worked properly, because _B is changed from 0,031 to 0,093 and _CD0 is also changed al little bit.
I’m using TECS_SYNAIRSPEED = 1, but TECS_OPTIONS = 0, because I just read about that parameter in the other thread.
You can find my log here https://www.dropbox.com/sh/z7pfgihoft435ne/AADy8WcR8s5EKIGVxuzl2UWka?dl=0
I hope that helps you to verify your feature.
Willy
I’ve tried and tried, but I can’t get Qgroundcontrol(4.0.8) to calibrate my radio (Frsky X9R+). Each time I calibrate Qgroundcontrol sees my stick input until the last stick input (pitch stick down). I’ve even tried holding the elevator stick down with a rubber band, but no matter how long the stick is down I get no response. Out of desperation I move the stick around pitch and roll. This causes Qgroundcontrol to accept the pitch input and lock it with roll.
While calibrating, the channel monitor monitor shows all the channels operating as expected at least until roll and pitch are locked together.
What do I need to do to get calibration to function properly?
Quick question. The lowest speed allowed in the parameters is 5 m/s. Is this just an arbitrary number? I’d like the aircraft to fly at 3-4 m/s if possible, I was thinking of writing in 3 m/s in the parameters regardless.
Also, @Roger_McClurg, have you tried missionplanner at all?
Hi Willy,
That’s great, thanks for posting, this will help to tweak the drag polar learning feature. Note that there’s no need to set TECS_OPTIONS to 0 if you have SOAR_ENABLE 1.
Sam
There should be no problem entering a smaller number than 5m/s. The warning is just that you are outside the “normal” range, most planes can’t fly that slow.
Mission Planner isn’t an option. My computers are all Macs.
Can you try APM Planner for mac? if you have all wiring correct and no weird parameters I have a feeling that the problems with QGroundcontrol/software instead of arduplane itself. Also, this isnt the best place to ask this question either, I think you’d have better luck finding answers in the ground control software side:
https://discuss.ardupilot.org/c/ground-control-software/qgroundcontrol/71
or just the arduplane forum:
https://discuss.ardupilot.org/c/arduplane/plane-4-0/153
probably more knowledgeable people there vs the soaring thread.
Here is a typical track of what I get when I activate SOAR:
The small circles are me manually thermaling in a very strong thermal, small circles, staying in thermal, and drifting with the wind.
I activate SOAR near the end of the track so that plane is in the same thermal, and SOAR circles using much larger circles, and not drifting with the wind. It loses a good thermal and does not get much altitude gain even when presented with a very good thermal.
SOAR flys the plane really well, performance is not a problem at all, the only issue I am having is SOAR ability to circle small enough and stay in a thermal that always drifts with the wind. Any suggestions ???
Hi Michael,
The size of the circle is nominally set by the parameter WP_LOITER_RAD.
It is also affected by parameters LIM_ROLL_CD and NAVL1_PERIOD.
Sam
I could see the same as @JetPilot, and maybe a SOAR_RAD and a SOAR_LIM_ROLL could help, because circling in thermals is much different to just loitering.
Circling in thermals normally is not so ‘efficient’ in matters of gliding or sinking, but the small radius is necessary to stay in the thermal lift - and so it’s efficient.
SOAR SUCCESS !!!
Thank You for the recommendation Samuel. ATX_Heli told me about the WP_LOITER_RAD setting in RC Groups. I had my first success using SOAR yesterday after setting WP_LOITER_RAD to 7 meters. I do not know how I missed that setting, but that was the problem. The glider would actually turn into a thermal and circle in it now. Yesterday was a really bad thermal day since there was cloud cover, so it is hard to judge how well it did as I was having trouble finding good consistant lift manually also… But SOAR did find and stay in some thermals, so I look forward to seeing how SOAR will do on a normal good day. I will also try optimising NAVL1_PERIOD and report back here as soon as I get a chance to try it again.
first of all thank you so much @Samuel_Tabor for all your work on soaring.
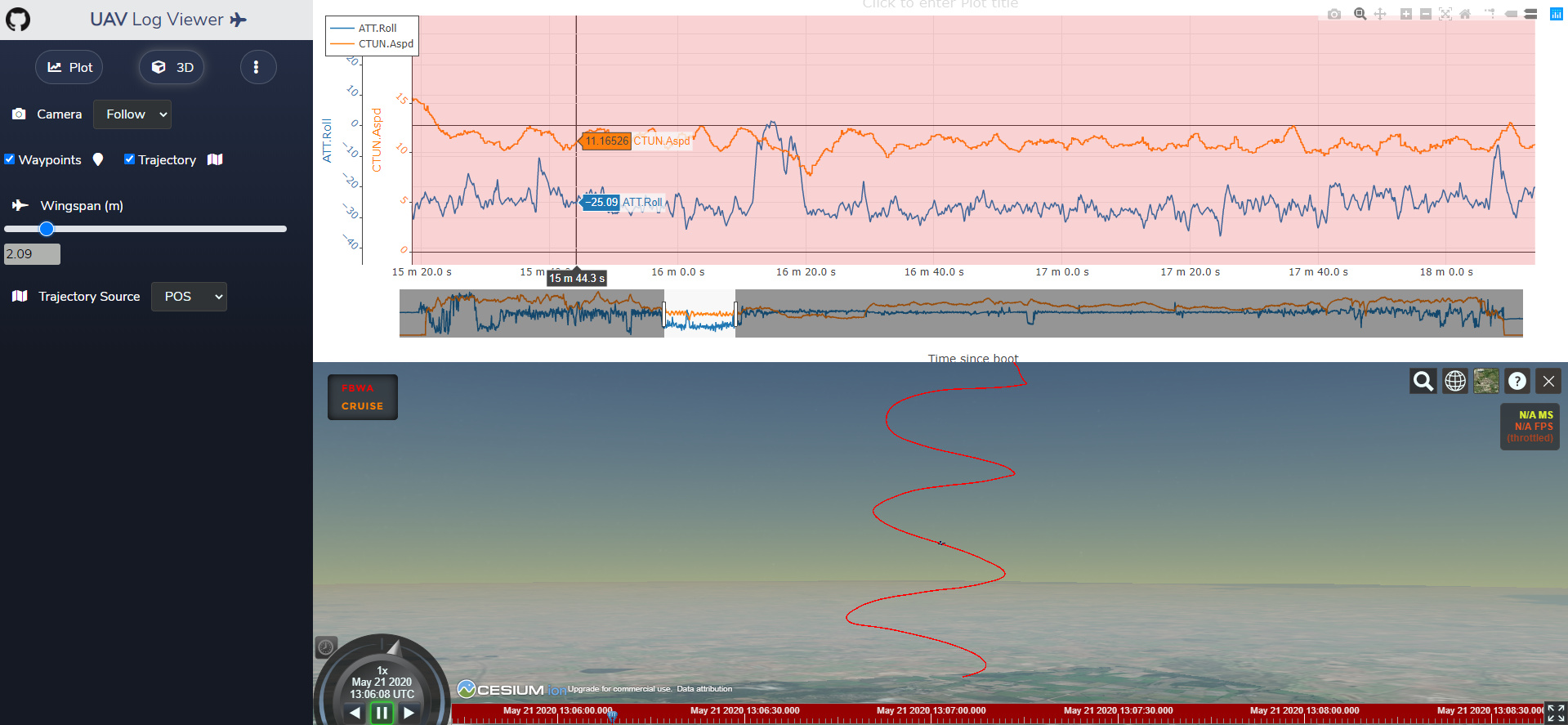
i looked at a usual thermal circling i recently flew manually (FBWA) with a 2 m glider on a day with medium lift:
it shows turns at around 25° bank angle at an airspeed of roughly 11 m/s.
calculating the turn radius using
r = v**2 / g * tan φ
where
r = turn radius [m]
v = TAS [m/s]
φ= turn radius [deg]
i did hit a turn radius of roughly 25 m. if i had loitered at the default WP_LOITER_RAD of 60 m at that given airspeed, i would have had to use a bank angle of 11°. on the other hand, if i had made full use of the default 45° LIM_ROLL_CD, i most likely would have had to increase airspeed to compensate for the added load factor (~1.4 times) and avoid a stall. with the airspeed raised to 14 ms and a bank angle of 45°, i would have achieved a turn radius of ~ 20 m, only marginally tighter than the turns on 25° with 11 m/s, at the cost of noticeably less efficiency and and higher load.
so my assumption is that while reducing the default loiter radius will likely improve thermal performance and centering relevantly, increasing the 45° bank limit will most likely not add noticeable benefit while increasing the risk to exceed the airframe’s load limits at compareably low airspeeds. this might be applicable to a range of typical 2 - 3 m foam gliders, but vary noticably on different plane types and sizes.
i appreciate thoughts and corrections on this.
cheers, basti.
I need to purchase an airspeed sensor for my new project. Is there a consensus as to which type analog or digital is better, or does it come down to personal preference?
@Quaxwilly yes separate parameters specific to soaring would be good. I am planning a code re-structure that will make this more natural.
@JetPilot great, glad it’s working better for you now. Looking forward to your flights when conditions improve!
@vierfuffzig Your analysis is correct. The “optimum” bank angle depends on many factors - wing loading and drag characteristics of the glider, thermal strength and also thermal radius. In full size 45° is often a rule of thumb. At smaller scale, a lower bank is better unless you are in a really tight bubble.
@Roger_McClurg I have used analog or digital with success. Currently I’m using this unit . They also sell one with an integrated compass that might be very useful.