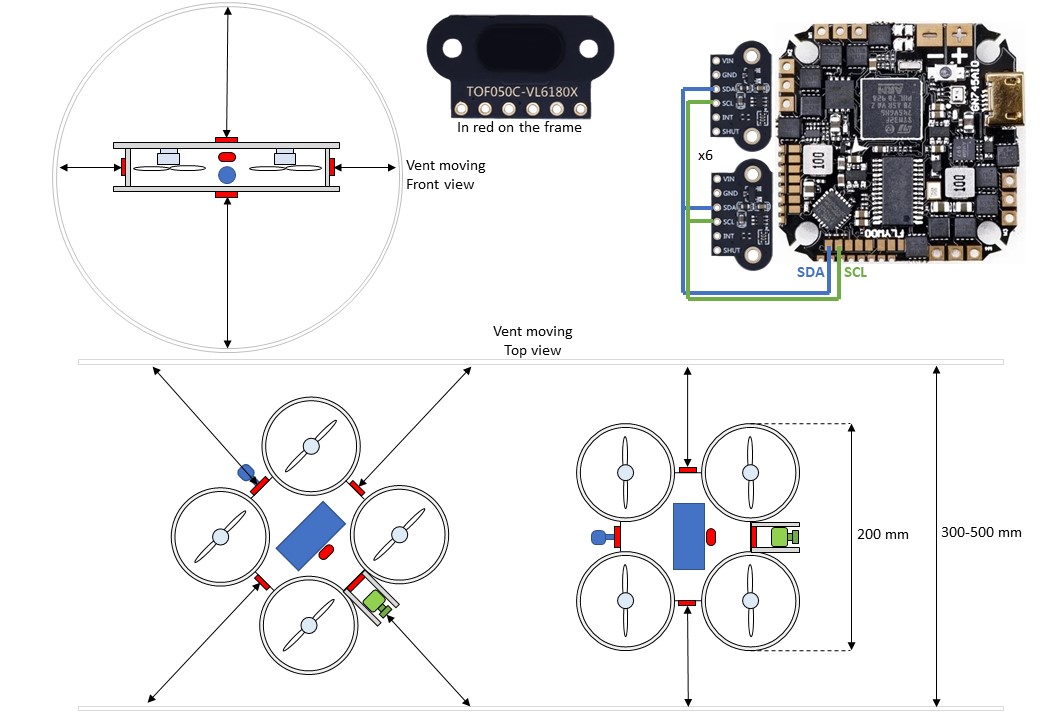
I would like to build a 2.5" Quadcopter to fly inside a pipe.
To do that I will used small TOF to prevent quadcopter hit the walls.
The flight controller is a GOKU F745 AIO
To achieve this, I have some questions.
1° Can I used VL6180X ? It seem similar to ST VL53L0X / VL53L1X Lidar
2° Can I used 6 rangefinder with IIC to save uarts ? (how to setup RNGFND1_ADDR ?)
3° Does rangefinders kept same distance between wall ?
Problem is that standard avoidance is limited to 1M minimum so the pipe minimum size would have to be 2M. Other issue You may encounter is highly turbulent air in a pipe would make the accurate control of flight nearly impossible