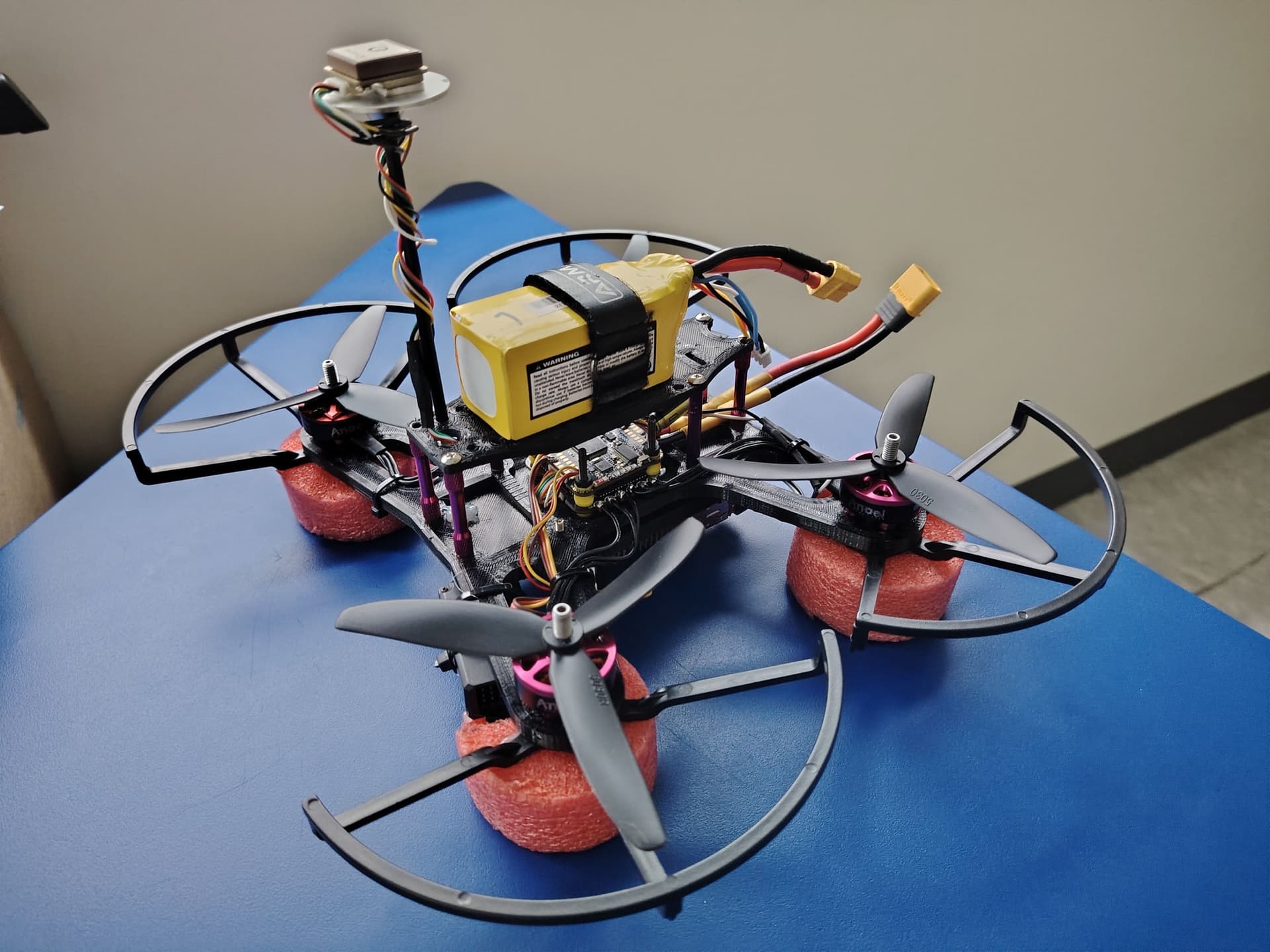
Hello! I built a 5 inch quad using the following setup:
FC: Speedybee f405 v3
Motors: DYS Samguk Shu 2306 2500kV (Yes, cheap motor. This is for a research study, still packs a punch though)
Battery: Zippy 4s 1400 mAh
GPS: MicoAir M10
Radio: Flysky FS i6 and receiver FS-ia6b (mostly will use RPi as it will be in Guided mode running a python script which works on SITL)
Frame: ZMR 250 3D printed PETG
It also has a raspberry pi 3 as Mavproxy on tailscale (which works like a charm)
The problem is I did a maiden flight, before that I did tune it with initial parameters on a youtube channel for 5 inch quads. In stabilize mode, I can feel that I can control the drone well (I have no idea about the oscillations and such), but then I switch to Alt-Hold, when I did throttle above halfway, the drone suddenly shot upward. Fortunately, I did motor emergency brake and caught the drone, just damaging 1 propeller.
Most probably you have not set correctly the PSC_ACCZ_I and PSC_ACCZ_P which must be equal to MOT_THRST_HOVER x 2, and MOT_THRST_HOVER respectively or that your MOT_THRST_HOVER is too high, and MOT_THRST_LEARN is disabled.
So set MOT_THRST_HOVER to a low value, maybe 0.2? then set MOT_THRUST_LEARN to enabled.
Then do a short STABILIZED flight first to get the real value of MOT_THRST_HOVER.
I see the PSC parameters, I’ll change it and begin another test flight tomorrow. Imma buy a new propeller since I broke the pusher and I dont have a spare.
Than you have to set PSC_ACC_I and P. If they were also correct, it maybe that you overreacted, if the copter was on the ground, when you begin to move stick up, nothing happens, and then when you just arrive at midstick the copter will apply hovering power, so it may seem that it jumped up.
If PSC_ACCZ are too high, the copter will oscillate up and down.
If they are too low, with a heavily loaded copter, the copter will do like “jumps”, it will shoot up, then begin to fall, then shoot up again.
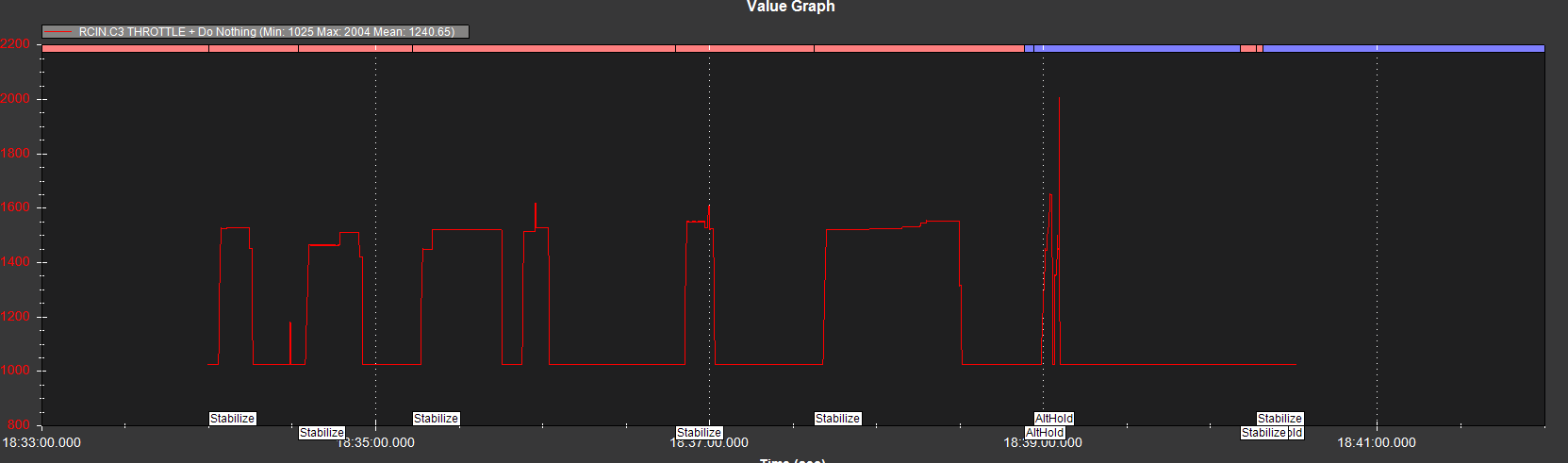
So initially 0 throttle, just arm speed; Then at around 40-50% it hovers ~1m from the ground. I applied a little throttle I think it was just slightly above the half of throttle, then it shot up at around maybe 6 meters. I was only targeting at 3-4m.
May I also ask on the logs since I do not know how to read and analyze them yet. Are the vibrations good? And RC inputs are good? This is my 3rd time building this and it already had a fatal crash twice. I redid it from scratch and this flight data is my 3rd attempt.
May I also ask on stabilize mode, when it hovers, i tend to push the pitch slightly forward since it moves backward when it hovers. is the center of gravity the cause?
Post the files generated by the configurator, they include the “reason changed” that you added to each parameter and a proper component list including connection list (vehicle_components.json).
During stabilize mode do you think your drone is hovering at low throttle stick? Do you think you could have a over-powered engine for the weight? Do you want to try adding a dummy weight at the CG point to see any different. Is your throttle stick spring-center type? How long have you give the Ardupilot’s propulsion system to learn?
Not with computer, didn’t read your logs, what are your mot_spin_arm and mot_spin_min values? While you doing the motor test without propeller and at the same time set the two values?
I think min is 15% and arm is 10%. I’m also out on pc and cant view the param at the moment and I’m new to this.
During Stabilize mode, it launches from the ground and hovers at I can say around 40-50% (i checked my flight log on hover, the value of CH3 is at around 1500 value throttle). I dont know about the motors being overpowered I just followed a recommended motor of around 2206-2306 on 2500kv for a 4s battery. Total weight of drone is at 632 (will make it around 670 sincr I’ll be adding a usb lte modem attached at around 30g. Some forums say that for a 5 inch it is quite stout though for its weight.
Throttle stick no spring since when I release, it holds there and doesnt come back to center (for throttle). Is that what you mean?
(edited % and looked at my param on PC)
Can I also ask I noticed something on RC in, RC out. I definitely did not throttle up at 100%, then I noticed my Bat graph also dropped. Does that mean anything?
Try temp reduce the pilot up, down and acceleration speed to lower first. Your stabilize throttle stick experience explanation does not look an over-powered drone to me.
Commonly not a standard, (100% RPM thrust of motor * number of arms) / 2.4 = safe hover weight range. Divide by 3 or higher for FPV race drone.
I also had this error takeoff blocked waiting esc rpm, but I fixed it by removing i think the takeoff min rpm parameter to 0 which was changed by the configurator
I might do a test flight with a leash on my drone using a fishing line or a thin rope in case.
Wait, is the orange foam part of your frame? I mean, will it “fly” with your drone?
If yes, I think it is causing the proper airflow of the propeller for an effective thrust.
Can you try to fly without it?