Now is at this stage, ready to first test the quad, I´m in winter so weather is a headhache  to fly; I can only try one time but not success to take off, something hardware related so I found a motor bad plugged
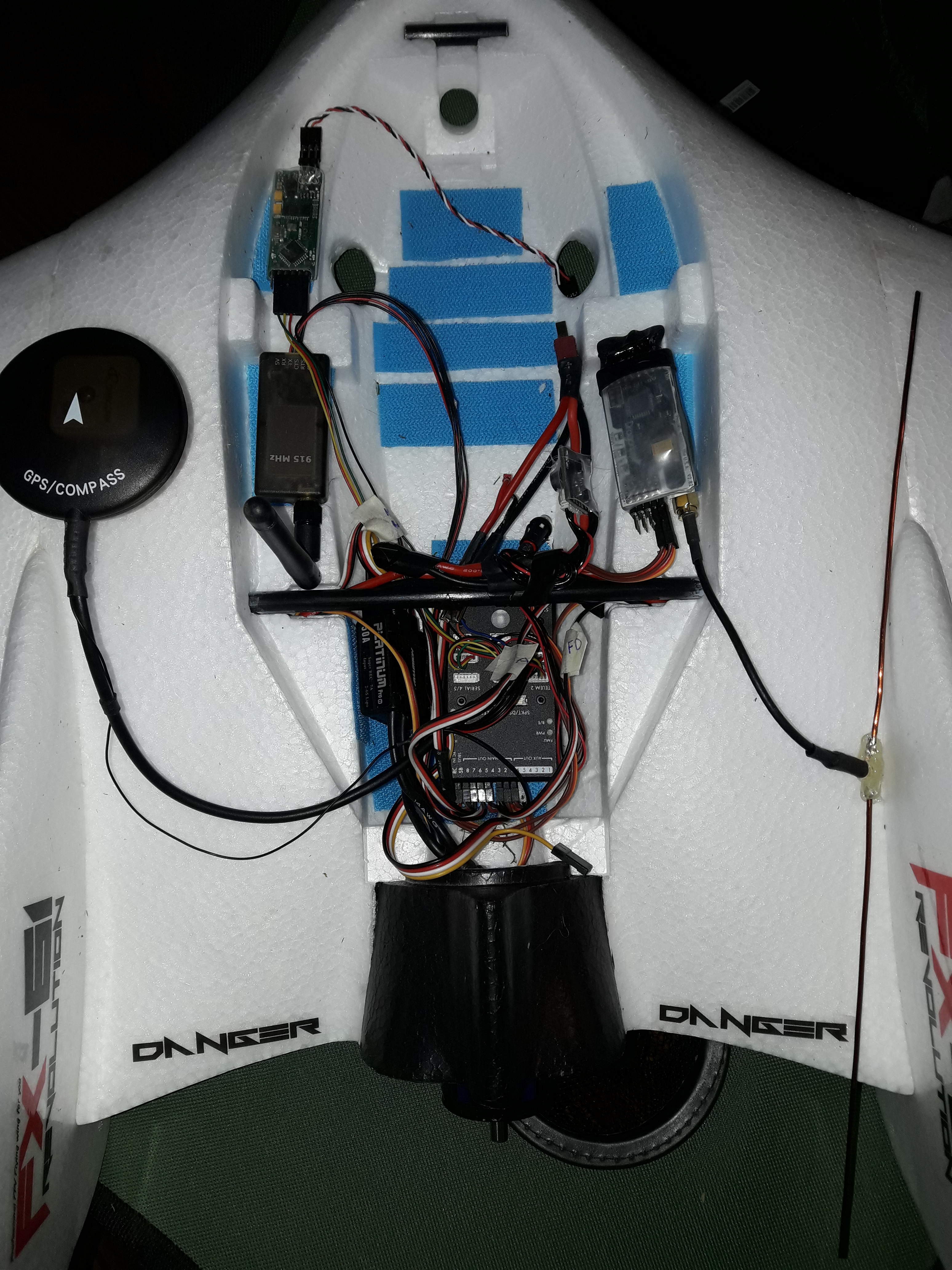
to fly; I can only try one time but not success to take off, something hardware related so I found a motor bad plugged  and waiting the rain stop to test again, I don´t installed the antennas in it´s place yet to avoid install legs until the quad fly well (for safe)
and waiting the rain stop to test again, I don´t installed the antennas in it´s place yet to avoid install legs until the quad fly well (for safe)