Hi Dave, I wanted to synchronize the motors before Auto Tune. Sorry to bother you, I recalibrated the ESC (Hobbywings 40A) on the ground and now motor A starts to rotate from 51% of the throtlte, all the rest motors from 6% together. How to proceed? Try to recalibrate on the street again? ESC calibration use Mission Planners Motor Test Function?
Recalibrate again I suppose. Use the all-at-once method with the transmitter.
Good afternoon, the problem with the motor remains unfortunately. When I lift the opposite end of the drone, motor A starts. If I to slightly lower the regulator, it stops first. In ESC calibration mode, I heard 2 beeps, then 3 beeps, 4 beeps and then they repeat. Shouldn’t I hear 6 beeps because I have 6S batteries? I re-calibrated several times. The result is one. Three motors turn on and work at the same time, motor A starts working when the plane of the drone changes and over 50% of the throtlte. What do you recommend me?
It’s so much easier with BLHeli_32 ESC’s. Post your parameters file again let’s see if there is something obvious. Not likely but no sure what else to suggest. Does it perform properly with Mission planners Motor Test?
Yes, motor A begun spin after 51% in the MP Motor test. Can I try use Semi Automatic ESC-by-ESC Calibration ? Is it normal that FS_THR_Value,1000 and RC3_min,1065 ?
Please, will you look last parameters
https://drive.google.com/file/d/1PPpiyBgiWpVAltVK9hLyx-yjF3g_XUyv/view
This looks like the same parameter file as before when it was working correctly so it has to be an ESC or ESC calibration problem. Motor Test proves this too. Perhaps during your attempts at ESC calibration one ESC entered configuration mode. Not sure.
These are not directly related, no problem there.
GOOD DAY, yestoday I didn’t understand your question about the .bin file, I downloaded the old file. Please, will see the new .bin after experimenting with the MOT settings … I re-calibrated ESC using the MP. The motor started to start a little earlier on the stick. After lowering to the min stick of the THR, the motors B,C,D are still spinning. How do you make them stop in this position the stick?
https://drive.google.com/file/d/1RX_FOcxMVVwFXY67uzDwhEAKPL_ZEPc5/view?usp=sharing
MOT_SPIN_ARM to 0 if you don’t want them to spin at low throttle after arming.
Dear Dave,
There was a lot of work and bad weather.
I calibrated the motors. I have done auto tuning, but I am not sure if the new parameters are preserved after landing. The drone swung and floated in a weak wind for about 10 minutes. After that, the drone hovered on altitude. Then I landed it and disarm. I do not see the parameter change.
Please tell me how to make sure that the auto tuning was successful?
Can I land the drone in RTL mode at the end of the auto tuning operation with HIGH RC7 channel and then disarm. Will the new parameters be saved?
https://drive.google.com/file/d/1j2MfZ5squZkWFLWNaO90CnwxMQ3h6dD_/view?usp=sharing
No. It must be in Auto Tune mode when it’s disarmed for the parameters to be saved. Don’t swiitch out of it. After is completes land and disarm without changing modes.
Good afternoon, Dave
Thank you very much for supporting the flights in the summer. Now I have changed the construction of the drone, lowered the height of the battery location by 2 cm on the upper platform, so that there is more stability during landing. Created a warm battery case to fly in cold weather. I made my first flight in the new layout of the drone. See what parameters will be improve?
https://drive.google.com/file/d/1rpF54UDiZiMfKWBAcpouPOYyoAJJ4Iyb/view?usp=sharing
Hi Sergey,
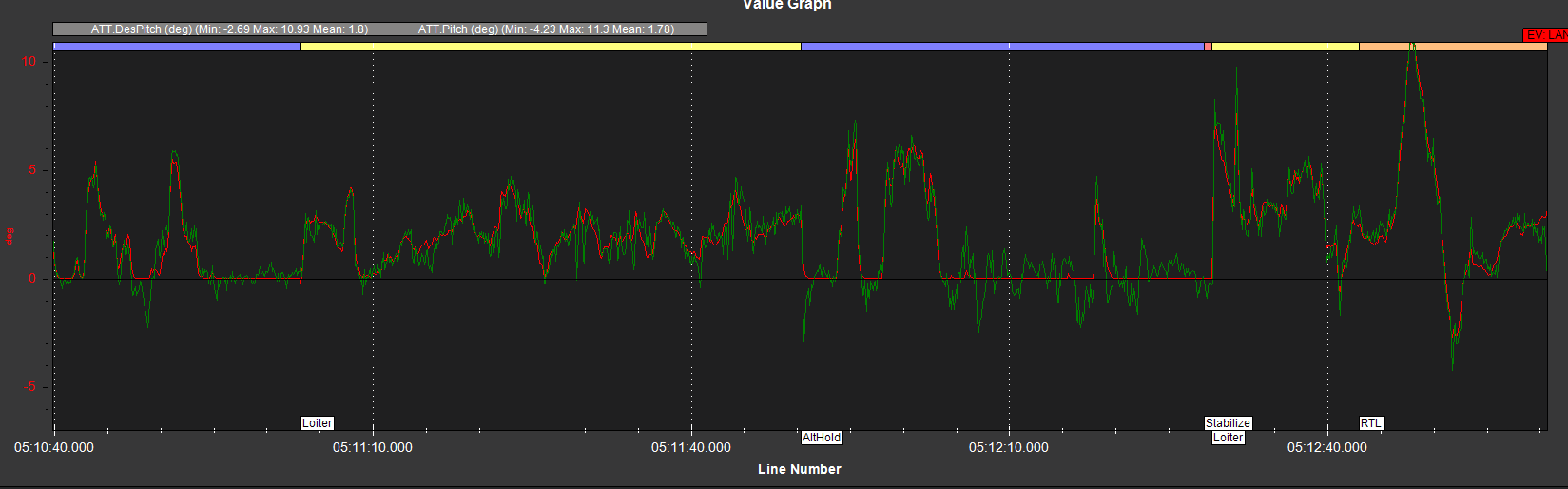
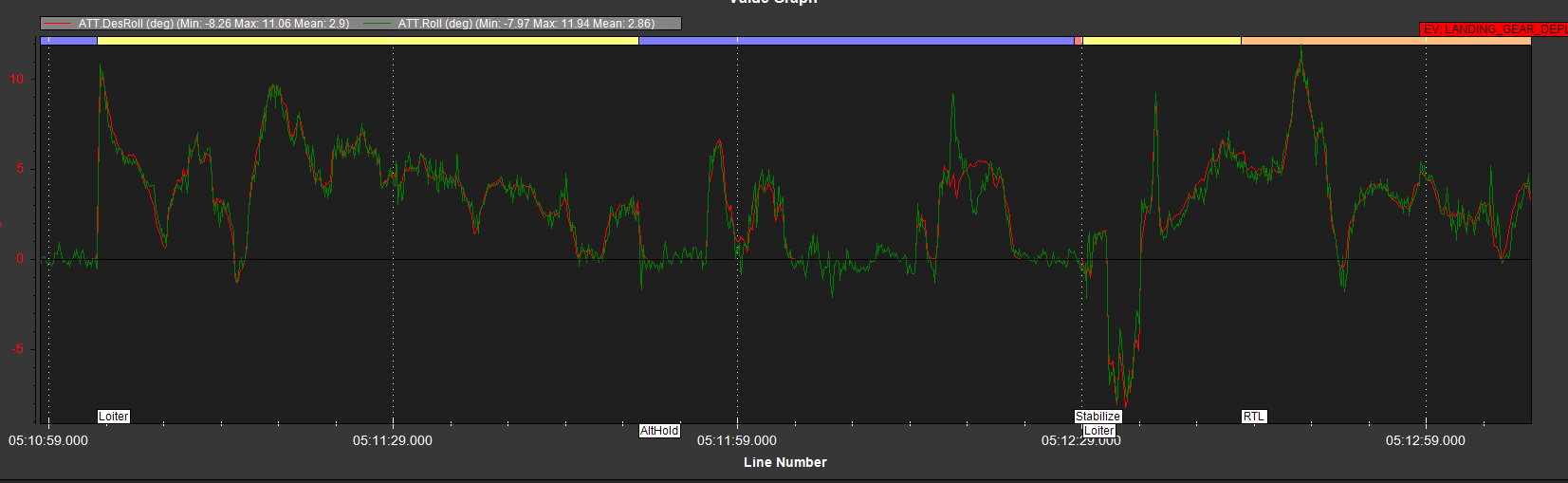
There is some jitter on Pitch and Roll. You could try to reduce the Pitch and Roll Rate P&I perhaps from .135 (default) to .110 We tried this before and it didn’t help but it might now.
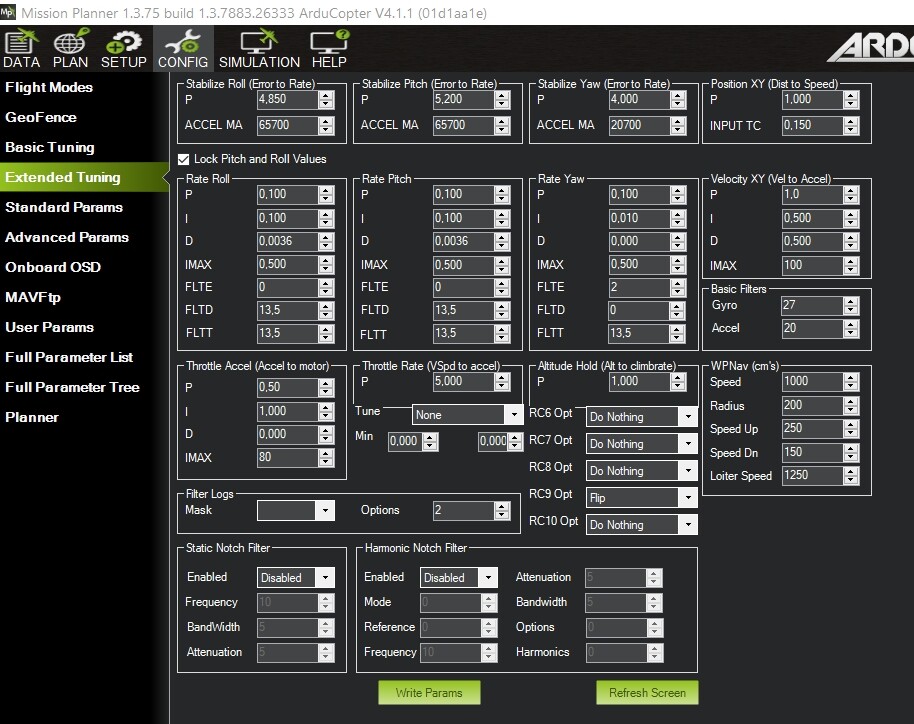
Also, you may want to revisit the Notch filters with a mechanical change. Set this back to 0 and make another short AltHold hover flight and let’s take a look INS_LOG_BAT_OPT
Good afternoon, Dave
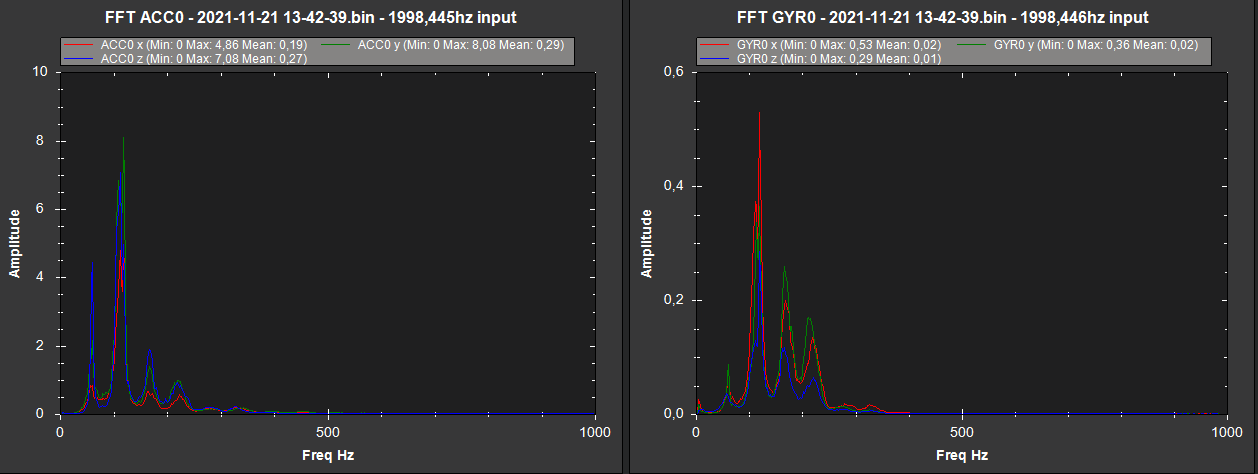
I have reduced the parameters to 0.100. The drone’s response in flight has become softer. Removed filters.
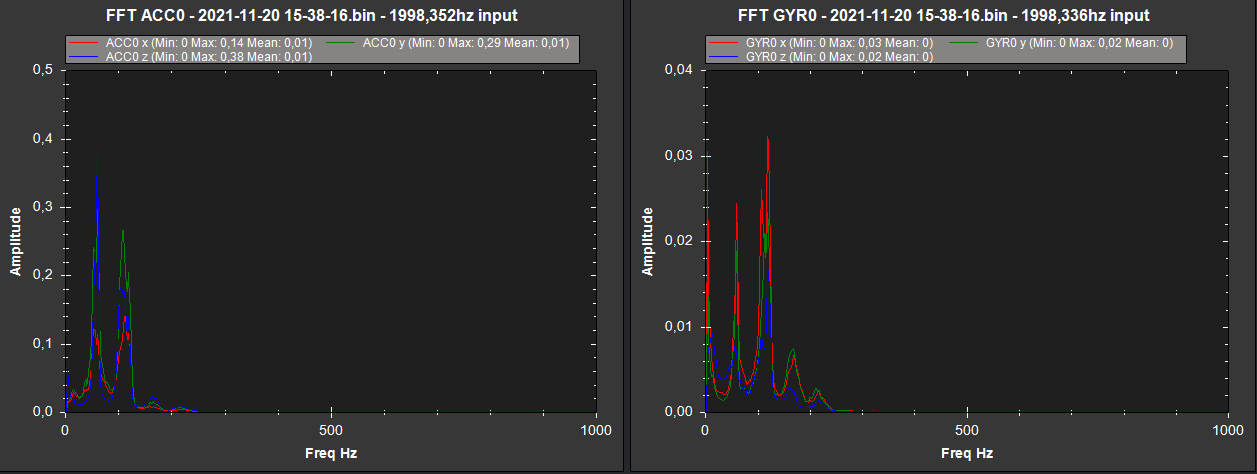
INS_LOG_BAT_OPT, 2
60 & 120 Hz is peak
What is reason for existence 5-10Hz?
What is your opinion?
https://drive.google.com/file/d/1hyv9mI_XDDkn64R4sbckNeSHYc6_Ev0S/view?usp=sharing
Best regards, Sergey
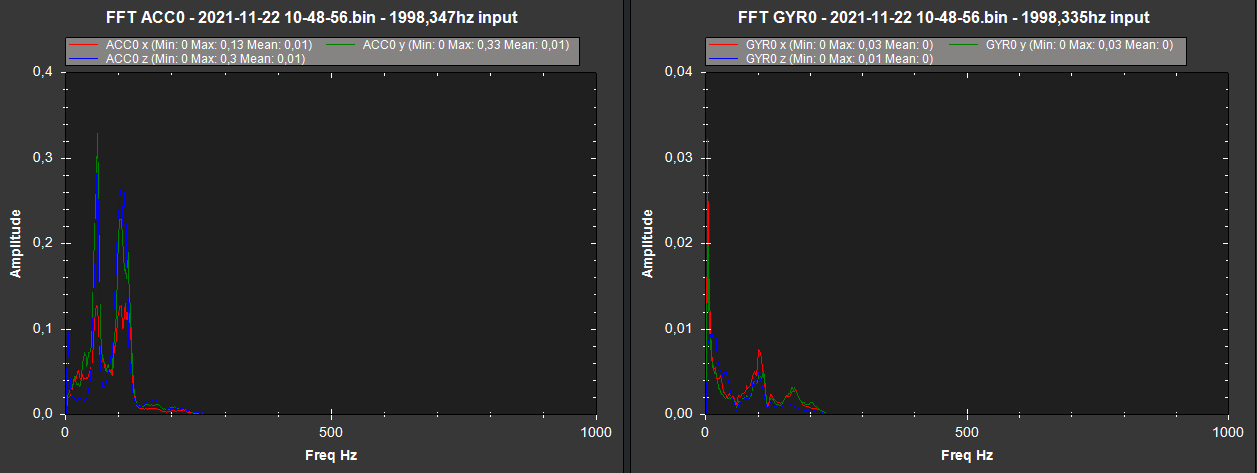
You need to set INS_LOG_BAT_OPT to 0 to see the pre-filter data. Looking at post filter data with Notch filter set doesn’t tell us much. Do that and make another short hover flight.
Hi Dave, I made short hover flight with Ins_log_bat_opt, 0
Please, wait your recommendations.
Best regards, Sergey
https://drive.google.com/file/d/1PjN0hHi0qGPmPJp6ql9ckHtCkO051ad-/view?usp=sharing
OK, the FFT looks about the same as it did before so I would suggest enabling the Dynamic and Static notches again with the same parameters as before.
Your question about the low frequency content (5-10Hz). These are rigid body modes and of no concern.
Hi Dave.
Information with filters. Can I do auto tunning?
At the end of the flight and switching to RTL mode, I do not like the short-term reduction in motor speed
https://drive.google.com/file/d/1tMxrxueaYhx7ntKEidSiTMpdqtobtk4k/view?usp=sharing
That looks a lot better now. You should read the tuning process instructions, there a test is explained that you must do to see if the copter is ready for an autotune. If that test pass, go ahead and do the autotune.
Hi, dear partners.
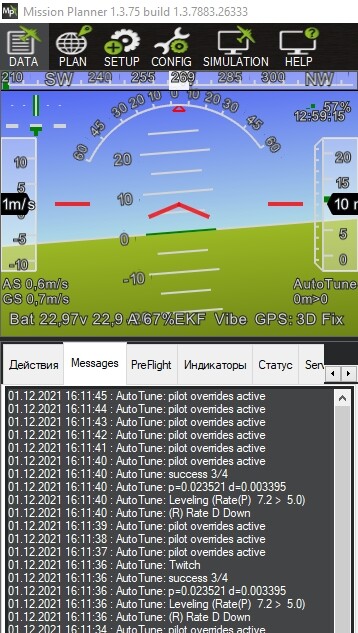
I had autotunnig with wind. MP say that process was 3/4. I landed drone in autotinnig mode, disarm device.
https://drive.google.com/file/d/1dV0zNJYOpevEx5TV1l6pDxinoB80-KU9/view?usp=sharing
Have the new parameters been written? what parameters can be manually configured?
After the flight test I got up again and flew a little time.
https://drive.google.com/file/d/1WILFhKPAwFmms4cpEzkiyqXsipiwJXCL/view?usp=sharing
I must to ending all autotunning process?
Best Regards, Sergey
Yes, it will only save the parameters if it is complete.
You landed while it was not completed, so it did not save any parameters.