I seem to have a vibration problem.
Sometimes the drone starts swinging and it goes away quickly.
This doesn’t seem to happen in RTL Loiter modes.
I was hoping someone could take a look at my flight log and see if there is anything that looks too wrong. Help me understand where is the problem? vibration, motor calibration, ESC, props?
As for the power supply, do not look at the errors, I eliminated them after the flight on the advice
Andras Schaffer, HUD Bad Battery Theme/
I don"t calibrate GPS in place of start. Why difference between min and max motor averages = 222 from 53 at August 3 ?
What needs to be done to reduce the imbalance between the motors?
And the tuning is poor. It doesn’t look like you have not followed the Initial Tuning Parameters guidelines. Connect to Mission planner and use the Alt>A plug-in and make those changes.
You need battery voltage logging at a minimum for the thrust scaling parameters to function. Fix that.
Auto Analysis is not up to date and mostly useless.
Good afternoon, I started today.
The wind was 7 m / s, so I tried to control in loiter mode, sometimes switched
on Stabilize. The drone hung steadily in the air and tilted correctly when moving. There was no previous swing, like last time, even with such a wind. The ascent and descent of the drone is smooth, the motors start to work at the same time after the ESC calibration. Besides balancing and vibration of motors, what else can be improved?
I understand that my drone balancing is not perfect, I will have to think about how to improve it.
Do I need to set the parameters (MP tip after Alt-A, ATC_THR_MIX_VAN = 0.5 PSC_ACCZ_P = MOT_THST_HOVER, PSC_ACCZ_I = 2 * MOT_THST_HOVER) ?
Thank you very much for your help, you give me hope.
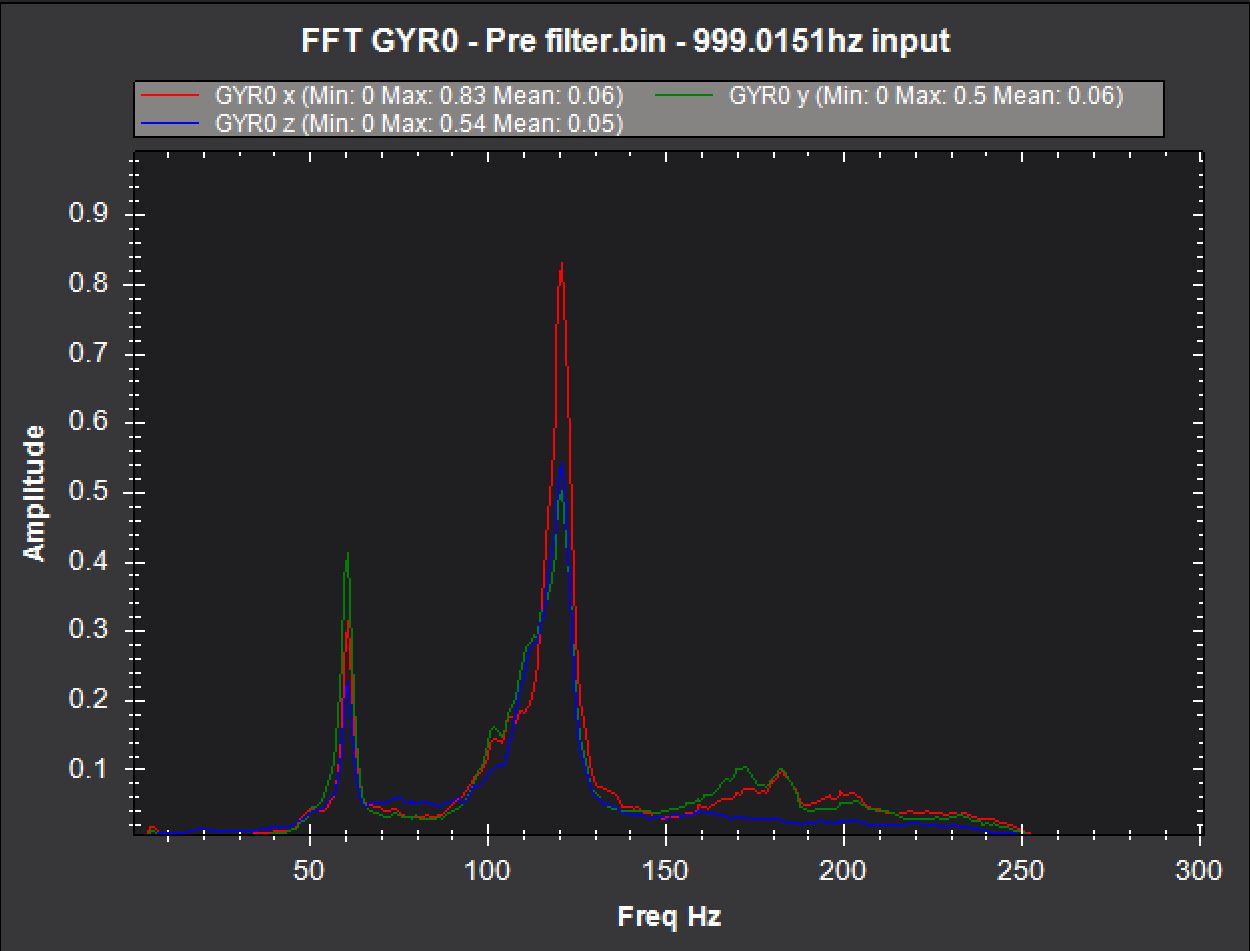
Yes, you can set those parameters but your Tune is not good. You should configure the Dynamic Notch Filter then tru Auto Tune or manual tuning. Set INS_LOG_BAT_MASK to 1 and make a short hover flight in AltHold and post that log for Notch Filter configuration review.
Dear Dave
Today I flew in AltHold mode for 5 minutes in a light wind, I had to adjust the flight to hover over one point. The drone hovers and moves in the wind - very beautiful. My only not smooth control of the stick spoils the whole picture. Please look at the flight analysis, what would you advise further to improve flight stability?
Thank you very much for your attention.
Best regards, Sergey.
I made refresh parametres. Why I see INS_Notch_Enable =0 in Parametr List? This is correct ?
I undestand - this is Static Notch now =0 we don’t use it now
Hello Dave
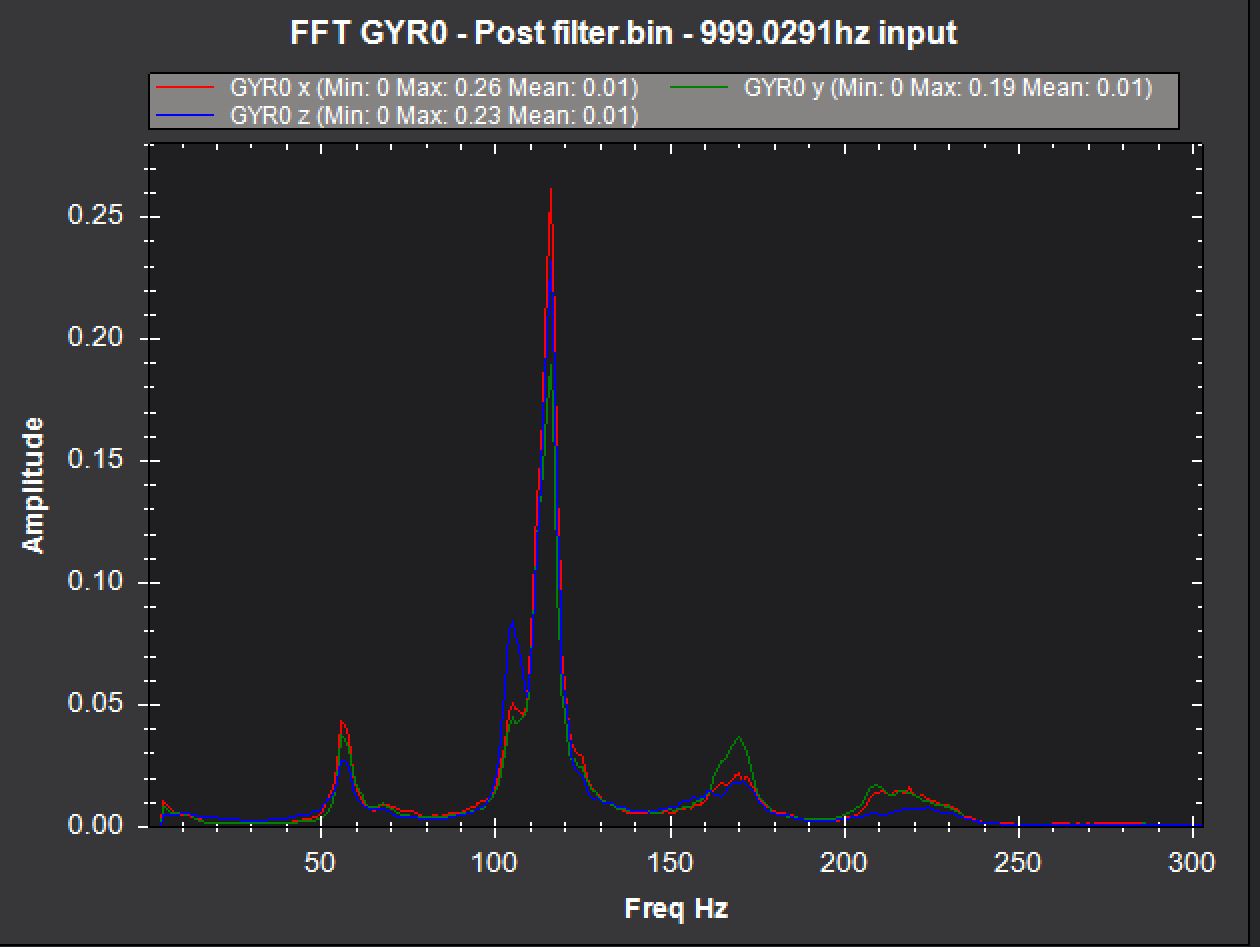
I made two flights. I made changes before the second flight -INS_LOG_BAT_OPT,2. Unfortunately, I didn’t think that the controller would write this data as one file.
Please see what happened. I look forward to your comments.
I like to fly.