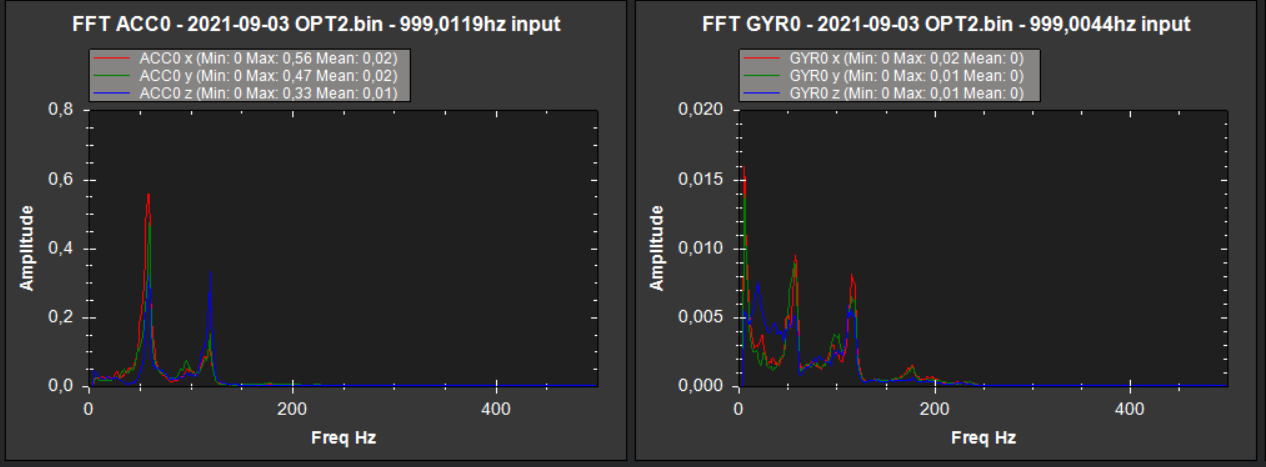
Motor RPM most likely. The Notch filter is configured now to target the 60Hz peak and the harmonic at 120Hz. It’s doing that (attenuated) but the peak is still there. So 60Hz with a Bandwidth of 30Hz and 120Hz with a BW of 60Hz (how it works). You could try an alternative approach by targeting the 120Hz peak with a BW of 60Hz and use a Static Notch filter for the 60Hz peak. If you want to try that and need help I’ll supply the parameters values.
Yes, Please send parameters for Static Notch. Can work together SN & HN in Cube controller?
Yes, they can work together on a Cube. Set these:
INS_HNTCH_ATT,40
INS_HNTCH_BW,60
INS_HNTCH_FREQ,120
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,1
INS_HNTCH_OPTS,0
INS_HNTCH_REF,.146
Set this then refresh parameters:
INS_NOTCH_ENABLE,1
INS_NOTCH_ATT,40
INS_NOTCH_BW,30
INS_NOTCH_FREQ,60
Make another short hover flight and supply the log.
Hi Dave, Thank’s for your attеntion to me.
I have done 2 experiments in the AltHold mode. At the end of the second blind near the ground, I landed the drone at an angle and of course it flipped over. It looks like nothing serious has happened. The drone must land strictly vertically.
What steps would you recommend next? do i need to do auto tuning? What parametres do you need to will to increase the weight of the drone by 2 kg of payload?
In panel HUD I see electric current near 20 A ( tlog file). It is normal for may drone in AltHold? How long I can fly with this the parametres? Is it simple formula for estimate the time of fly?
INS_LOG_BAT_OPT,2
https://drive.google.com/file/d/1yFSCDR2Di_XUZicHo883hYB_l8TZFhWf/view?usp=sharing
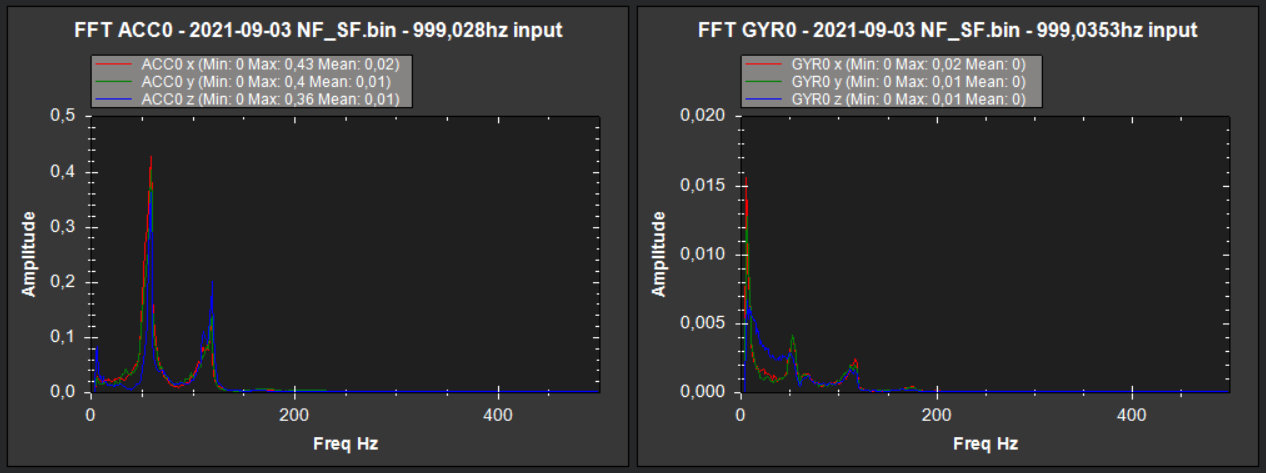
SN & HN
https://drive.google.com/file/d/1WWV7dB18nkyGXX8oK77eSa-com4QDk3t/view?usp=sharing
The autotune page explains how to change the parameters when you add more weight.
Good afternoon, can you specify the place where "how to change the parameters when you add more weight " … I did not find the correct content.
The Combination Notch Filters are working very well, I would stick with that.
At what Take-off weight are you seeing 20A?
This is noted in the Tuning Process Instructions. Page down to where it starts “For aircraft designed to carry large directly mounted payloads”
Tuning Process
I would 1st add the payload and give it a careful flight before changing these. I have seen one example on a big X8 copter where the calculated values based on added TOW were too low.
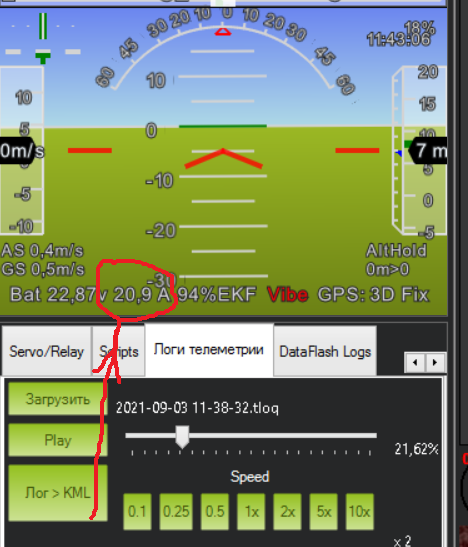
That current actually looks low for 5kg with the components you listed in the 1st post.
Yes, Auto Tune would be the next step. Did you do some manual tuning on this already? The rate PID’s seem to indicate it. It’s not typical for rate P&I to be different values, they are usually equal. And they are low. You may want to be careful starting Auto Tune with those values.
Yes, I did manual tuning. What parametres P&I you recommend before starting Auto Tune?
These.
ATC_RAT_PIT_I,0.058
ATC_RAT_PIT_P,0.082
ATC_RAT_RLL_I,0.0545
ATC_RAT_RLL_P,0.082
P&I should be equal and I don’t know how you got them so low for a larger craft.
one of my friends set it up PID , and he did the first flight. I did not like.
Can I setup autotune_aggr:0.075 before starting Autotune mode for safety? now autotune_aggr:0.1
I would be tempted to set the Rate PID values back to default and trying a test flight. I’m talking only about these. The filter values are OK.
ATC_RAT_PIT_D,0.0094
ATC_RAT_PIT_I,0.058
ATC_RAT_PIT_IMAX,0.222
ATC_RAT_PIT_P,0.082
ATC_RAT_RLL_D,0.0058
ATC_RAT_RLL_I,0.0545
ATC_RAT_RLL_IMAX,0.22
ATC_RAT_RLL_P,0.082
ATC_RAT_YAW_I,0.035
ATC_RAT_YAW_IMAX,0.2
ATC_RAT_YAW_P,0.14
No, don’t lower aggression. This can cause a really bad tune.
Hi Dave, Where I can see Rate PID values default? If I push “reset to default” , then which parametres will change?
Don’t do that, everything will reset. Start the Simulator in Mission Planner and pick quad for the vehicle. The PID’s will be the default values.
Simulation - quad / multirotor
ATC_RAT_PIT_D,0.0094 default= .0036
ATC_RAT_PIT_I,0.058 = .135
ATC_RAT_PIT_IMAX,0.222 = .500
ATC_RAT_PIT_P,0.082 = .135
ATC_RAT_RLL_D,0.0058 = .0036
ATC_RAT_RLL_I,0.0545 = .135
ATC_RAT_RLL_IMAX,0.22 = .500
ATC_RAT_RLL_P,0.082 = .135
ATC_RAT_YAW_I,0.035 = .009
ATC_RAT_YAW_IMAX,0.2 = .500
ATC_RAT_YAW_P,0.14 = .090
ATC_RAT_YAW_P,0.14 = .090 below recomend low parameter .1 in the MP.
I set ATC_RAT_YAW_P,0.1 ?
ATC_RAT_YAW_I,0.01?
In your experienced opinion, is it normal parameters?
Looks OK to me. Make those changes. If it’s jittery or there is oscillation drop the Rate Pitch/Roll P&I to from .135 to .100 and try again. If it’s basically stable run Auto Tune.
Good afternoon, dear teacher.
I made 2 test flights. Wind 4 m / s, I didn’t want to perform Auto Tune operation. The soft mode is Rate Pitch / Roll P&I .100.
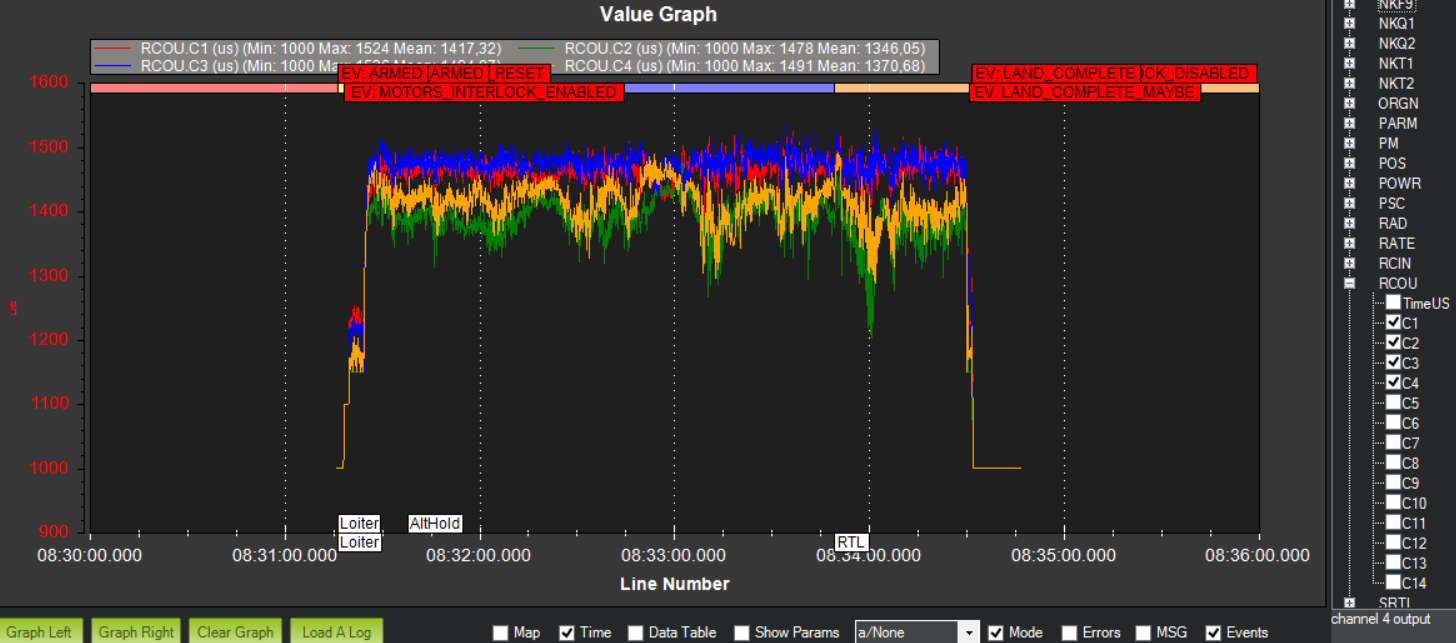
Rate Pitch/Roll P&I .135 first fly, drone capsized on the ground, my mistake
https://drive.google.com/file/d/1PPpiyBgiWpVAltVK9hLyx-yjF3g_XUyv/view?usp=sharing
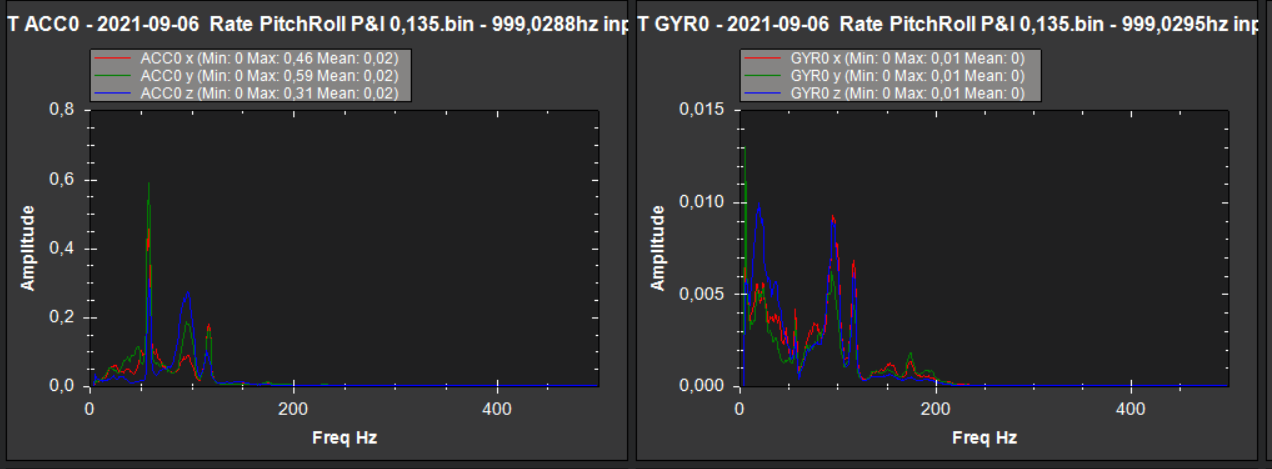
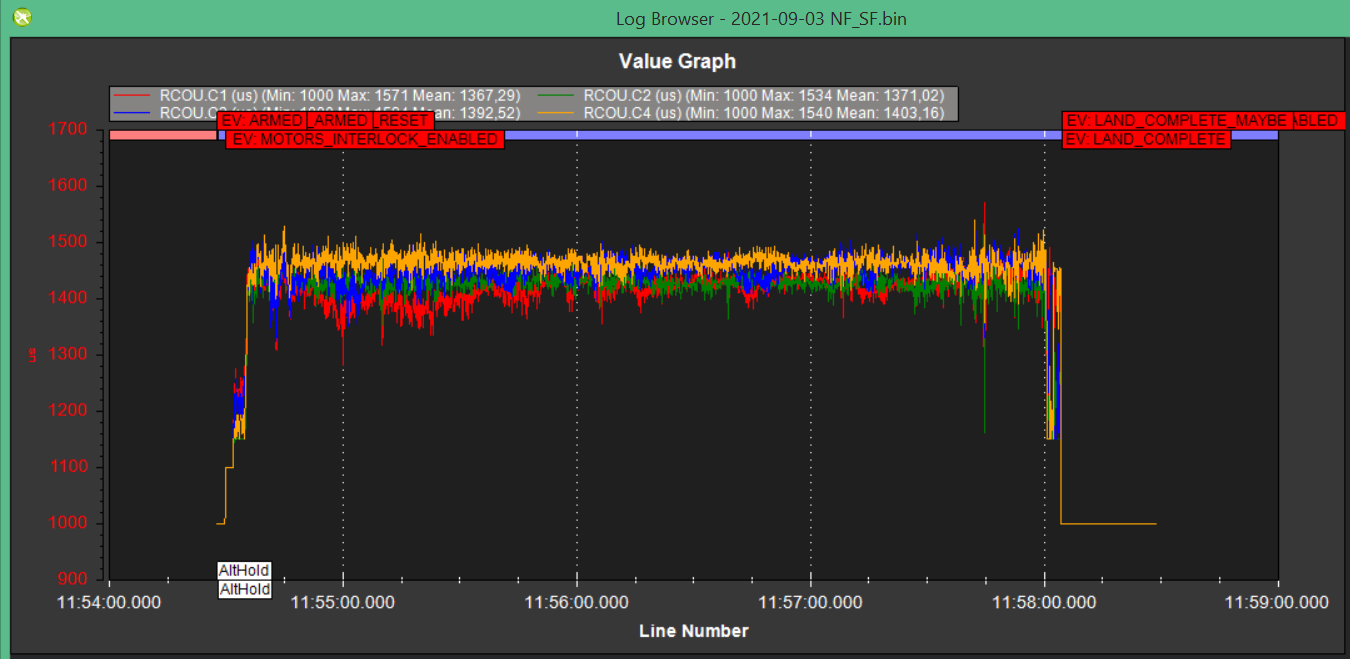
Rate Pitch/Roll P&I .100
https://drive.google.com/file/d/1EFwaXNIUY6hbXs_M8Mo0YRysPXxus74v/view?usp=sharing

Do I need to rebalance motors and arms, change the props? Please, see the picture, but visually on the flight, I did not see any differences.
before 3 days, it was like that
Do you have any questions about the stabilize parameters?

I would say the default parameters (.135) look a bit better. Those Stabilize parameters will be adjusted with Auto Tune. Give Auto Tune a Try.