A very short first flight of a HEX build using Pixhawk 2.1, Copter 3.6.8
This will be for delivery purpose but simple flight test right now so, You will see, it is overpowered at the moment.
Would someone please look at the IMU, MAG field, whatever else would be the key points within the log file…
This In-flight IMU calibration scares the Begeezzes out of me. I don’t remember the original Pixhawk doing that. When it happens the HEX Yaw’s a bit back and forth.
Is there a fault in my setup causing this, How can I stop it?
Any suggestion or direction would be very appreciated. Trying to get this stable and work towards feeling comfortable with an Autotune
Well, thank you for looking. My apologizes for the wrong bin file
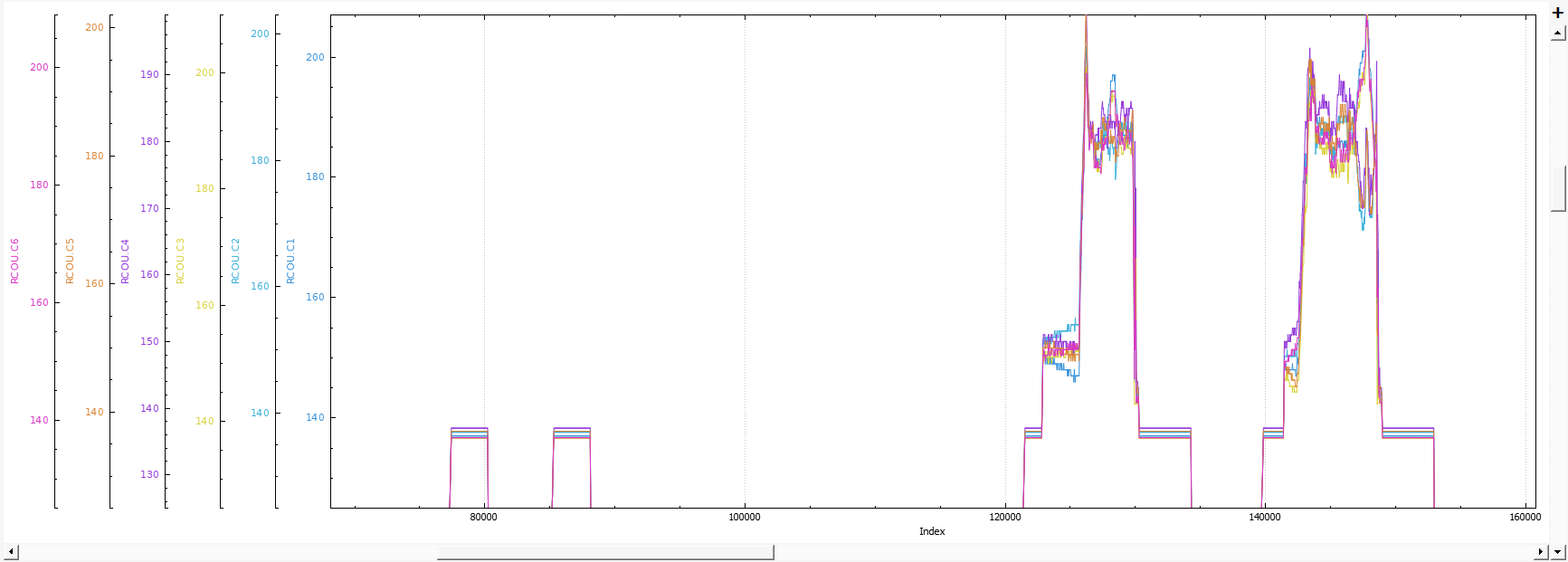
I’ve verified RCOUT - ch3 looks to be what I remember, 3 different very quick lift off, hover, then land.(Within the file below)
That IMU in-flight calibration makes me nervous, then I set her down and try two more times increasing the flight time slightly, trying to get a feel for her…
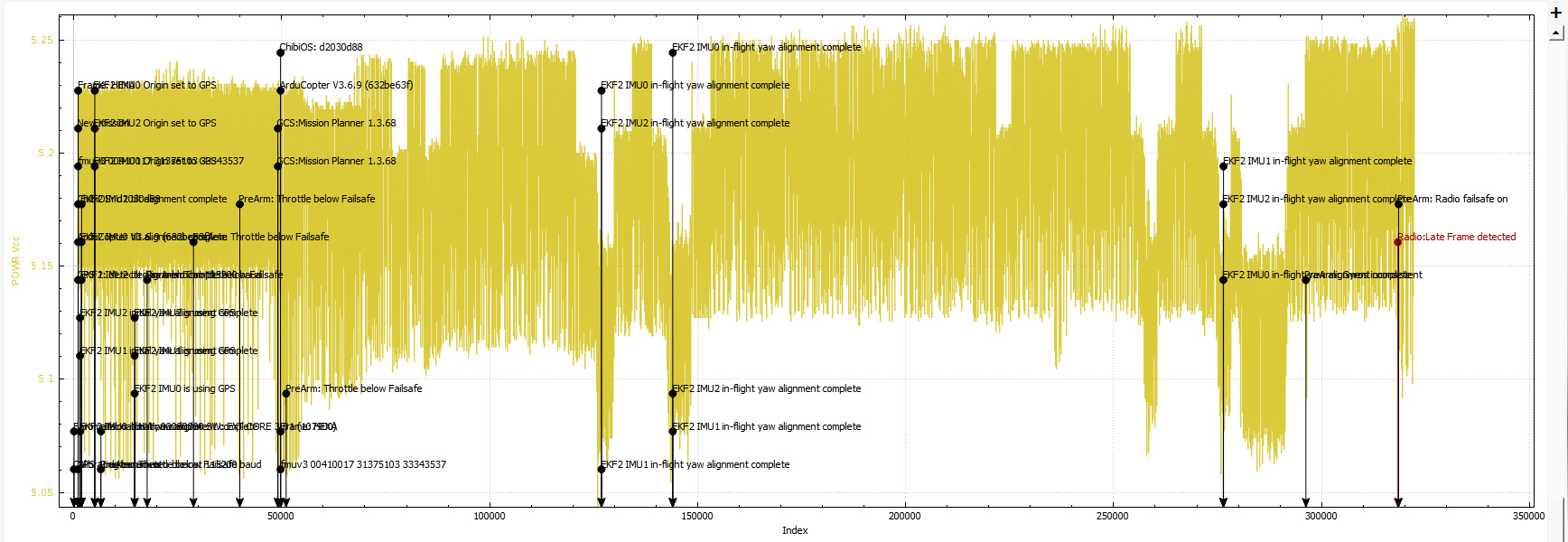
and a warning, it seems that you have a little bit power surge (more power surge is very dangerous ) i suggest to use external ubec and power module at same time to prevent crash because of a power surge.
also there is many “in flight yaw alignment” message in power surges
I do have a MAUCH power supply which I can use to power the Cube via secondary power input. I’ll do that now.
NOTE: I’m currently using the stock power module that comes with the CUBE, running 6s Lipo. I will also use an alternate battery so we can compare results afterwards.
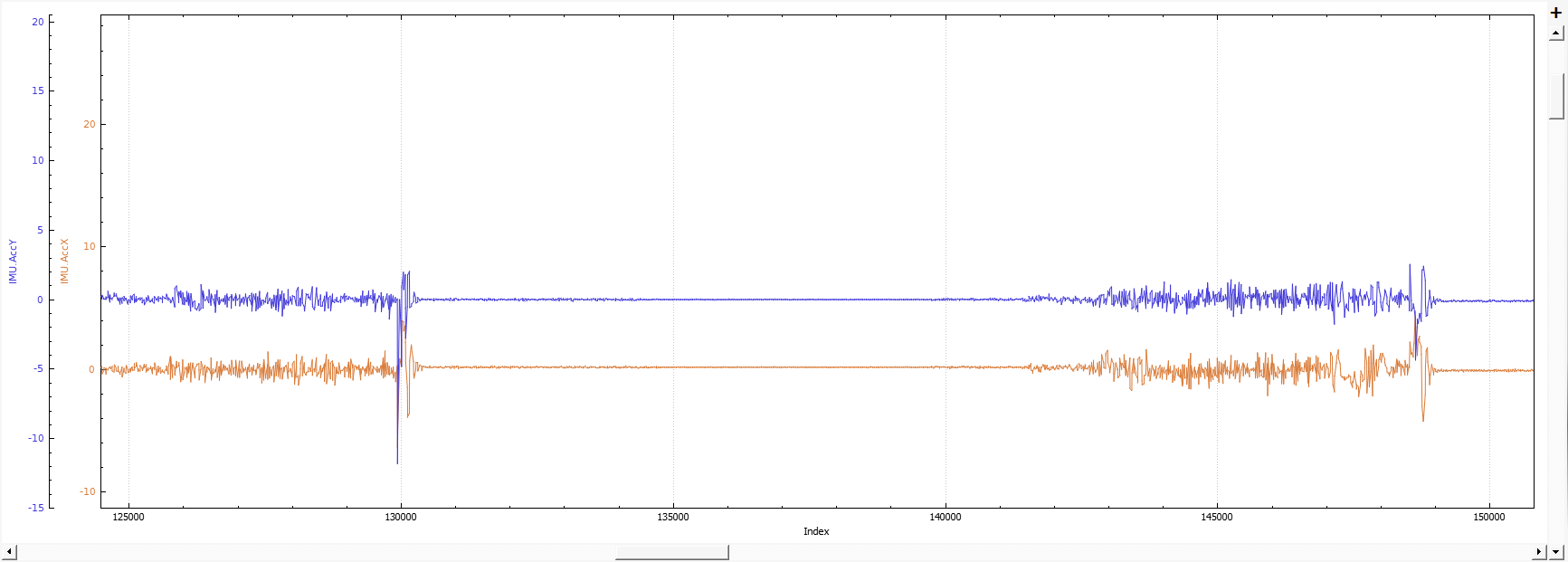
As Far As AccX and AccY, should I move some components or add some Foil to reduce Mag field ? what do you suggest would help with this??
This is Tarot HEX frame, all ESC power wires running under the plate which Flight controller is mounted… Signaling wires come up the middle into backside rail of CUBE
ESC’s mounted at the end of arms, shouldn’t be a factor
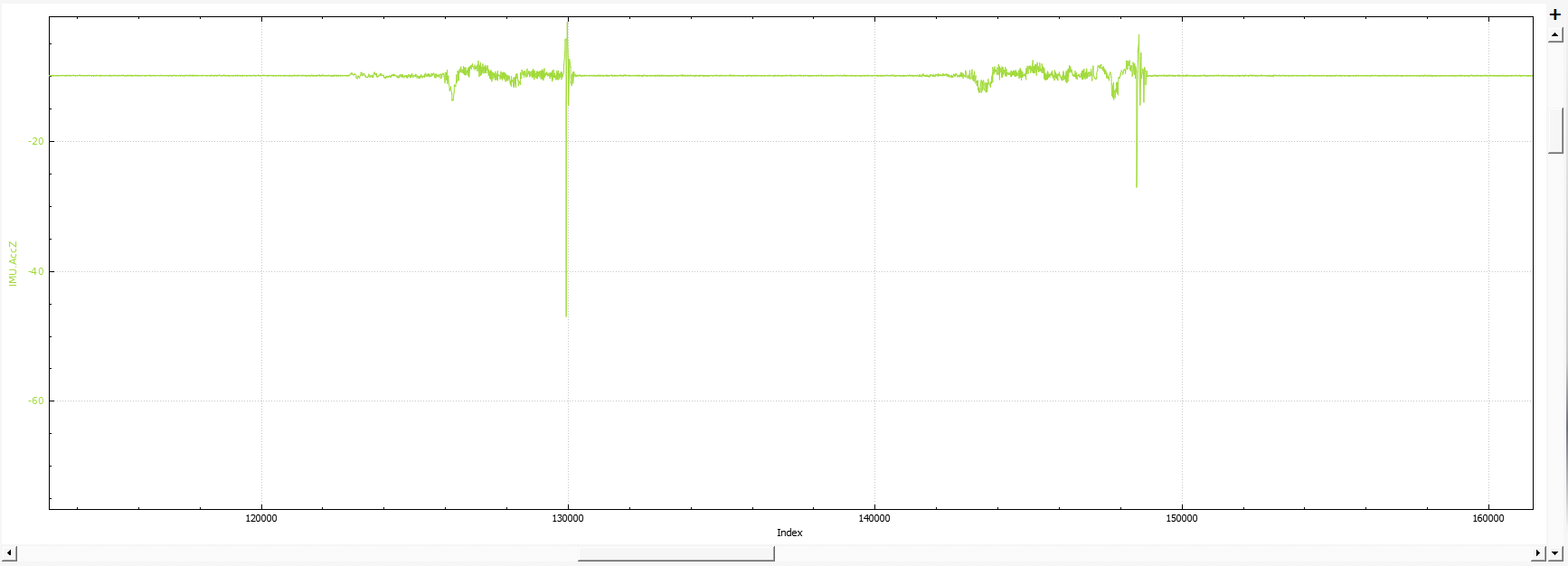
Not much can be learned from that flight log either. The Acclerations noted are meaningless as they are a result of landing it looks like not craft vibration. That’s why Vibe is a better metric to use. But It didn’t fly long enough to determine if the vibe levels are acceptable. Also I see no problem with the power. That range of Vcc is common and nothing to be concerned about.
Even the lowest voltage seen in that log is >300mV above brownout and not a “surge”. I have had several craft consistently below that with cheap power modules w/o issue.
I would encourage the poster to hover for a few minutes and post that log so something meaningful can be learned.
All,
Thank you so much for your input. Dodging the rain however, will have another flight today, a good bit longer and change to ALT Hold to learn Mid Throttle.
Still keeping my eye on the in-flight IMU calibration .
Will post the log for caparison directly
As the weather has finally allowed. I had a 2 minute flight today. Switched to ALT HOLD and let it learn Mid Throttle.
Below is the link to bin file…
I’ve not looked yet but If you could help me with the best method to verify Mag Field is within tolerance… IMU in flight calibration is successful and anything else (Vibration…) I should be concerned about on a New build, I will gladly return the effort…
There is nothing out of the ordinary to see in that log. Vibration levels look OK. There really is no “tolerance” for mag field but there are no compass errors in the log so nothing to worry about. I don’t know about the health of that battery. It drops 2.5V on takeoff. You have a low battery failsafe but no surprise with the threshold at 21.4V and what looks like a weak battery. Why do you have a COMPASS_TYPEMASK parameter set and some Arming checks turned off?
Tuning could be poor but you didn’t pitch or roll it enough to give feedback to check this.
dkemxr, thank you for your excellent feedback. Great catch on the battery voltage, I was hoping that would be noticed, obviously why the flight was so short. That tattoo 7000mAh 6s battery is 2 years old. I’ll use an alternate next flight. Should I not get around 30 min flight times on this build?
Cant say I remember altering COMPASS_TYPEMASK What is the default value and I’ll reset it… COMPASS_TYPEMASK=0 ?
I did set GPS GNSS MODE=67 after seeing on occasion GPS Bad Signal Health , which I understand may bee seen if update rate falls below 5hz
I’ve done NO manual tuning as I’m not that experienced with such… Trying to work towards long enough, stable flight time for AutoTune, which, I’ll use an alternate battery and try an Auto Tune tomorrow.
The flight log seems no longer accessible, but there’s a few good rules of thumb to check the general health of a new build:
Vibrations: Z vibration should be less than 30 (VIBE.VibeZ), X and Y are usually less than Z. Ideally you should not experience any IMU clipping in flight (VIBE.Clip0, clip1, clip2). Check this at a hover first, and later check it at high speed.
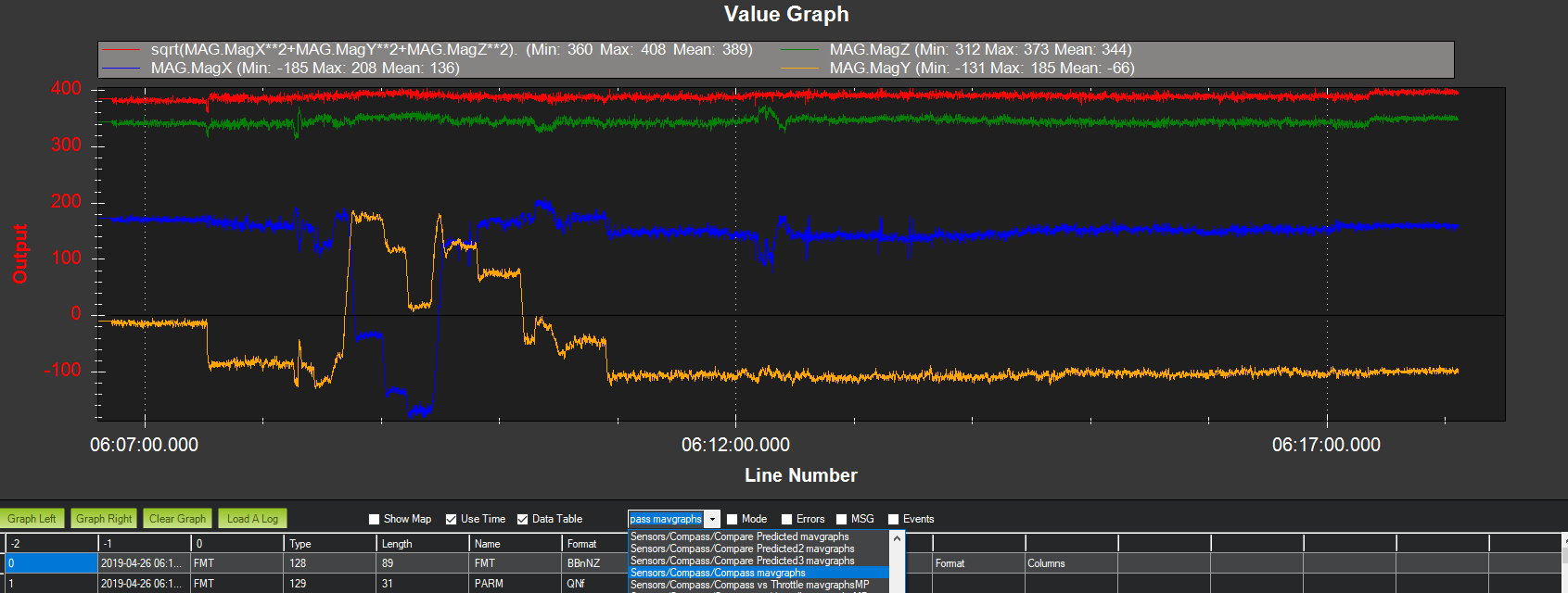
Compass: The important measurement here is whether total field strength varies while the drone is maneuvering. The total field strength should not change by more than 5-10% once the drone has performed yaw realignment (this happens at 2.5 meters altitude). The total field strength is the magnitude of the magnetometer x, y, z vector; Mission Planner has a a handy premade graph for this (one of my logs shown):
Notice how mag X and Y are changing (drone is yawing), but the mag field strength (red) doesn’t change. You can check this on your drone by maneuvering around a bit.
CG and motor balance: hosein mentioned this earlier using your motor outputs. An easier way is to look at the rate controller outputs. Look at RATE.POut, ROut, and YOut. These can be interpreted as “percent effort in pitching, rolling, and yawing the drone.” They should therefore be centered around 0 when the drone is hovering in still air if the drone is balanced.
Tuning: Autotune will do most of the work for you. However, you mention delivery, which means you’ll have a variable inertia and a rather overpowered drone when empty. Make sure you tune at empty takeoff weight, and then afterwards you should probably reduce the ATC_ACCEL_*_MAX parameters to lower the requested rotation speed for when the copter is laden. Also, since it will be overpowered when unladen, you may need to reduce MOT_SPIN_ARM and MOT_SPIN_MIN to ensure your motors have enough control authority on the bottom end if your unladen hover throttle is less than 20% or so.
Can you explain this a bit more? There should be no inflight IMU calibration. Are you referring to the yaw realignment/ground mag anomaly? This shouldn’t cause any twitching, but I see from the screenshots above that it happened three times. I don’t recall if it is supposed to happen multiple times if you ascend above the 2.5 meter threshold more than once, and I can’t download your log (the site says it was deleted), so I can’t look into it.
Greetings gentlemen,
Thank you Anubis for your detail, my apologies on the log issue. One step at a time for me, Trying to get Roll and Pitch tuned as I believe MAG, Compass and Vibe are within limits…But I’ll revisit them per your direction and method…Thank you!
TWO flights today. The goal was to hover in AltHold and AutoTune Roll, land,save values. Then tune Autotune Pitch…
Current values before either:
AUTOTUNE_AXES=1
AUTOTUNE_AGGR=0.075
ATC_RAT_RLL_FILT= 10hz
ATC_RAT_PIT_FILT=10hz
First flight went alright, lasting roughly 7minutes until land and saved ROLL values.
Changed Axes to 2 (To Autotune Pitch)
Took off, then engaged AltHold, then AutoTune via Channel 7
She Pitched FORWARD HARD, I would say got Vertical and could not recover in time before hitting the ground. The 3 landing skids DID take most of the blow and as she did make it Mostly to Horizontal, Everything seems good. I pulled the stick down and called it a day…
My Question, what is the Parameter to adjust the Pitch from being SO Aggressive, I dare say violent?
Being an overpowered HEX (without carrying a load) is surely a contributing factor.
(Would it help to see screenshot of my current values?)
Yeah, looks like the first autotune twitch excited an unstable ocsillation.
ATC_ACCEL_*_MAX will help with that. These parameters set a limit on the fastest angular acceleration that can be requested. You will want to start with a low value (the parameters list gives a guideline on what constitutes “low”).
Looks like Leonard (Arducopter’s tuning guru) just released the first version of an updated tuning guide yesterday. Take a look. It’s still under construction, but it seems pretty comprehensive.
I’ve seen ONE other person around the internet having similar troubles with tuning his larger Frame( 960 15inch props), Hex (Larger than 14in props) and thought about adjusting my PIDS to reflect what he ended up with…(ATC_ANG_PIT_P=13.57 ATC_ANG_RLL_P=12.93)
My thought… it’s closer to what I’ll end up with vs. the defaults (Which are based on the Solo??)
Question: If I Autotune ROLL , then PITCH separately… should I “un-tick” this option ‘Lock Pitch and Roll values’ ?