Hello,
One of my drone fly away for any reason please can you review log and say me if you find something…
https://1drv.ms/u/s!Agg5RltHfc_vivgangC-Ie4JKB1STw?e=r5jBgG
Thank you
Hello,
One of my drone fly away for any reason please can you review log and say me if you find something…
https://1drv.ms/u/s!Agg5RltHfc_vivgangC-Ie4JKB1STw?e=r5jBgG
Thank you
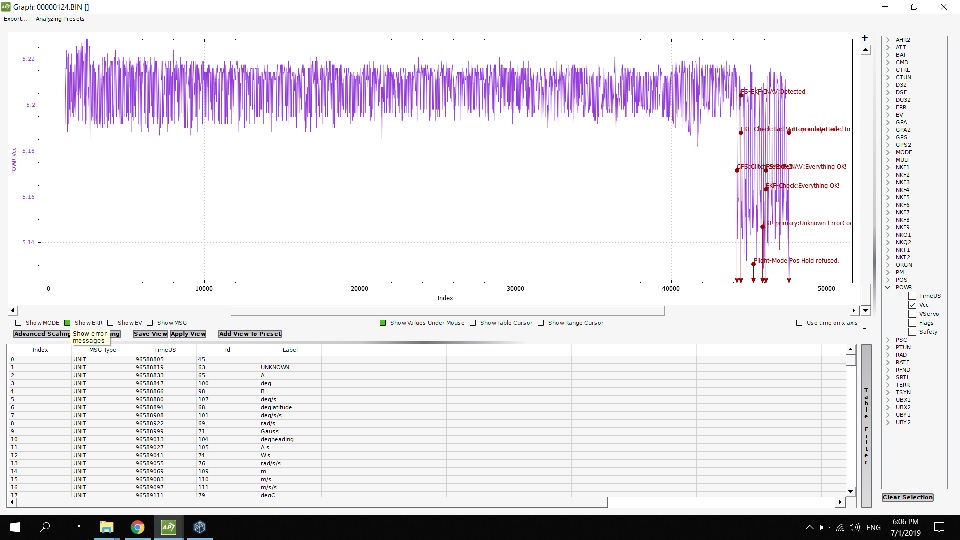
What’s your FC 5V power supply ? It started fluctuating wildly, then you experienced a GPS glitch and a bunch of EKF errors. Then your log terminates at 20m altitude - did you end up in a tree ?
Seems to be a miss calibrated or throttle induced magnetometer error which led to an EKF failsafe.
Your copter was fully controllable if you switch to AltHold or stabilize and fly it manually.
Unfortunately MAG values and RC values are missing from the log, along with Vibrations so it is hard to prove, but this is the most likely cause.
hi Laurent
it seems that your drone crashed because of a power surge
ARM board like Pixhawk are sensitive to power surge and it could make disorder to other modules like GPS and compass
looking at your log, after power surge you got compass error and GPS glitch
Hello,
Thank you for your comment, I will check that.
I’m using a Mauch power cube: https://www.mauch-electronic.com/apps/webstore/products/show/7595373
With primary connected on power 1 and second on power 2 + servo rail on my Pixhawk cube.
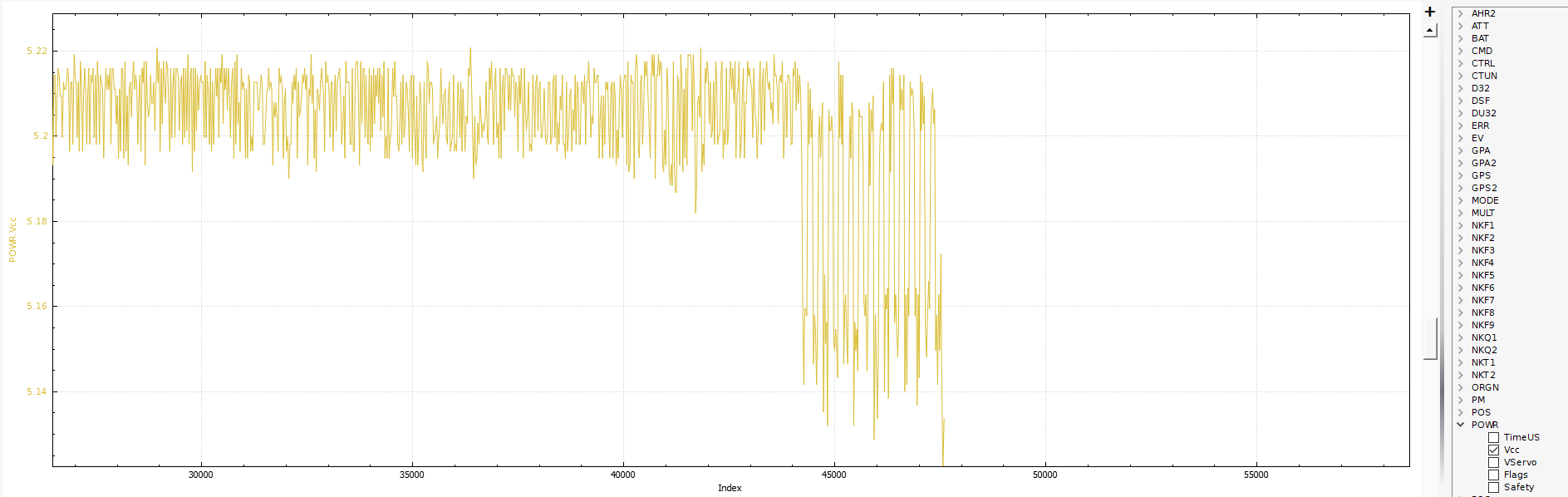
Definitely not power issue. 40-60mV ripple is not good, but not terrible either (Just like 3.6 roentgens :D). and 5.14V is far from brownout. If you look at Position Innovations from EKF, it went haywire before the VCC started to ripple. So would still bet on magnetometer failure.
Andras, don’t jump to “definitely”.
A mag, IMU or sensor failure on the dataset or digital output can affect the uC workload, but our run-of-the-mill STM32Fx can’t surge a decent switching power supply like what you see in the graph, while just ramping up computing power.
All I see is a hardware failure, leading to a noisier (not failing) power supply, then an abrupt termination of logging sometimes after.
Well it is about cause and effect…
Based on the log, power surge cannot be the cause, since the effect (increasing Pos innovations) are occurring before it.
Gyro and Acc sensors cannot be the culprit, since their failure cause immediate stability effects, which does not shown when you compare roll/pitch and desired roll/pitch.
Left the GPS and mag. GPS does not show sudden change in x/y pos, it has a nice smooth curve, which starts to diverge from EKF position on the longitude axis about 1 sec before the surges started (while copter had a ground speed of about 9m/s).
Conclusion, there is only one sensor left that plays in the EKF position calculation and not counted above, it is the magnetometer. If you measure the time between ripples it is exactly 500ms, which is hardly a power failure, but rather some faulty component that tries to reinitialize and draws extra current. (Could it be a magentometer which has a nice capacitor for degaussing ? Datasheet says it is current limited, but a failed component can do anything)
I agree with Eosbandi about the Vcc voltage fluctuations. I’ve seen that before and it’s related to (mainly) the beeper going off when there’s some error or failsafe condition, possibly even the LED and the beeper together. The LED by itself doesn’t cause those voltage fluctuations.
If you fly and initiate a failsafe by radio, you should see those fluctuations on the Vcc. If you disable the beeper/buzzer and redo the test you’ll notice there’s no such fluctuations in Vcc.
The brownout on VCC can happen with cube/carrierboard with PSM, caused by a unproper initialization of PSM. This causes PSM to work improperly and results to voltage sag on pheripheral bus. GPS + external status LED is enough to cause this issue. Newest bootloader should fix ithis.
Brownout is vcc<4.7v, 60mV from 5.2 to 5.14 sag is not a brownout.
Hi Andras
I agree with you the reason of crash is missing mag calibration
But what is the reason of missing calibration ?
I think its because of power surge
When i was work on arm boards power surges are the main reason of many module failures
For another example if you overclock your gpu with a weak power supply you can see snow effect and suddenly ram failure because of low power and surge