ok, i will try again when weather permit, here just start rainy season 
thank you so much Greg
ok, i will try again when weather permit, here just start rainy season
thank you so much Greg
No problem. Here we have the cold and snowy season so not much flying gets done.
One other thing to try is to set Q_WVANE_GAIN to 0 which would eliminate the weathervaning feature from being the cause of the rocking.
I’ve had heaps of problems with my FF6 pro and I’m considering ripping out the insane control system (3dr radios, bluetooth PS4 controller etc…) and replacing it with a TBS crossfire, then running APM plane and mission planner. I’m sick of needing a laptop to fly basic missions and taking forever to even get set up to fly.
I just have a basic knowledge of setting up a pixhawk and arduplane from building a ranger ex recently and it was pretty straightforward. How difficult is it to come across to APM plane from AvA? I see you guys have done a lot with the DIY15 but I have the pro with 2x 6s batteries.
Cheers,
Adam
Hi Adam,
It’s difficult to offer advice based upon your brief text description. Since AvA has it roots in APM, I don’t see how changing this area will alleviate your issues. The setup for each is similar. Perhaps the AvA Pro setup forces use of the PS4 controller instead of an R/C receiver?
Using a TBS Crossfire will combine R/C and telemetry signals but not change your Ground Station needs. However, eliminating any Bluetooth interface will reduce problems as they are just finicky.
Can you describe what your “basic missions” consist of? Are these for mapping or surveys?
When using telemetry to control missions, either AvA or APM can make use of a tablet or smartphone (instead of a laptop) using a 3DR or RFD900 telemetry unit, if desired. The telemetry settings can be changed to make them more robust.
If using a FrSky radio system, you can get most of your telemetry right on the transmitter display without the need for a laptop. A simple cable between the Pixhawk and the FrSky receiver is all you need.
Hi Greg - apologies for my lack of clarity  The FF6 pro does indeed force the use of a PS4 controller, which can either be connected by USB or bluetooth to a laptop. I find this to be a terrible interface for manual flight, but clearly it’s designed for ease of uptake by people not familiar with more traditional RC systems. The latency is huge and the controls are not intuitive if you’re used to a normal RC setup.
The FF6 pro does indeed force the use of a PS4 controller, which can either be connected by USB or bluetooth to a laptop. I find this to be a terrible interface for manual flight, but clearly it’s designed for ease of uptake by people not familiar with more traditional RC systems. The latency is huge and the controls are not intuitive if you’re used to a normal RC setup.
There is no alternative ground station software under AvA, you’re stuck with the FF planner which is not actually terrible but has no tablet version. My preferred set up (which I run on the Ranger) is a small andriod tablet running Q Ground Control which I have mounted on the taranis, which gives me a ‘dashboard’ to monitor the aircraft. I can concentrate on what the aircraft is doing and not have to constantly refer back to a laptop screen. A lot of my flying is in very remote and dusty areas, especially over the summer and a laptop is just not a great solution for me. Add to this the use of the telemetry radio via USB into the laptop and it really is a clumsy set up.
I use the FF6 and Ranger to deploy radio re-trans units for a bespoke GPS tracking system. I’ve done a little survey/mapping work but not with the FF6 so far (due to the problems I’ve been having with it). Most of the time I’m driving between locations (maybe 20km apart), setting up and flying a mission for maybe 20-30min then packing up and moving again. Most missions are flown off dirt tracks in the outback, or sometimes a farmer’s land if we’ve got an arrangement with them.
So a basic mission for the FF6 would be takeoff, go to a set waypoint and loiter at max height (121m here in Aus). I can do that without needing to spend any time setting up autonomous missions in the FF planner, just by using FWBA mode then hitting loiter/circle when I get where I want to be. RTL to get back overhead then manual land. That’s my workflow with the multi-rotors and Ranger and it does the job quickly and easily.
To be fair to the FF6 I am running their software via a VM on my macbook, so I’ve had a lot of problems with the drivers for the controller and radio, but I don’t have these same problems with Mission Planner and my Crossfire/Taranis set up.
To be honest I would have preferred to buy a DIY25 kit but they stopped making them available when I went to buy one, and the Pro came up via a local reseller very cheaply as it was bought in for someone who then didn’t go through with the sale. I don’t have any interest in most of the pro features, I’d be happier with a more simple set up that I can deploy without spending 20min setting up a full groundstation.
Hope that helps establish what I’m trying to achieve
Cheers,
Adam
Hi Greg,
I live in the NYC area and have a FF6 DIY 25. How are you able to acquire spare parts? I have an extra set of DIY 15 motors and wings and would like to complete a second bird. Do you have a good contact with BEV?
PS Thanks for all the great information on your posts here and on RC Groups! Keep up the good work!
Cheers,
Hi Mattia,
You can e-mail Christine for parts at BirdsEyeView Aerobotics using the address below. Just tell them what you want and they will tell you if they have any in stock and open a secret link for you to order them.
finance@birdseyeview.aero
Good luck!
Hi Adam,
Ok, this makes more sense so thanks for adding the details. I agree with your findings on the PS4 controller as it seems to be favorable to their intended (non-RC) market. I also like using my Taranis and running QGC on an Android tablet in areas where setting up a laptop requires too much space. It’s easier to get up and running.
I see that your flying areas are not always as nice as a flying field environment. So to answer your original question, it is not difficult to change from AvA to APM as Tridge has made the Pixhawk connections the same with one exception for the Tilt Servo connection on AUX3. However, our success stories have been with DIY15 setups. The first conversion of a Pro model did not seem to fly well. I plan to convert my DIY25 model soon but it doesn’t have the twin 6s 5200mAh packs. The other paradigm shift is in using a flight mode change for transitions versus the AvA Hover/Forward flight mode lever. I had several other models that used the lever so it took me a few QuadPlane projects before the APM way became more natural to me.
If you decide to make the change, you can leverage David’s hover mode PIDs but will likely need to carefully test the forward flight modes. Tridge has been very helpful with log analysis in this area.
I finally got a chance to look into this issue. I believe that what you are seeing with the retract functionality is correct, it is just not necessarily what we want.
In my setup, I have SERVO10_FUNCTION set to 57 which uses RCIN7 (tied to SF on the Taranis). All the Servo output functions say?
Setting this to Disabled(0) will setup this output for control by auto missions or MAVLink servo set commands. any other value will enable the corresponding function.
…like RCIN7
In AvA, the retract and transition functionality was integrated into both R/C transmitter control and Planner functionality (toggle button and flight plan).
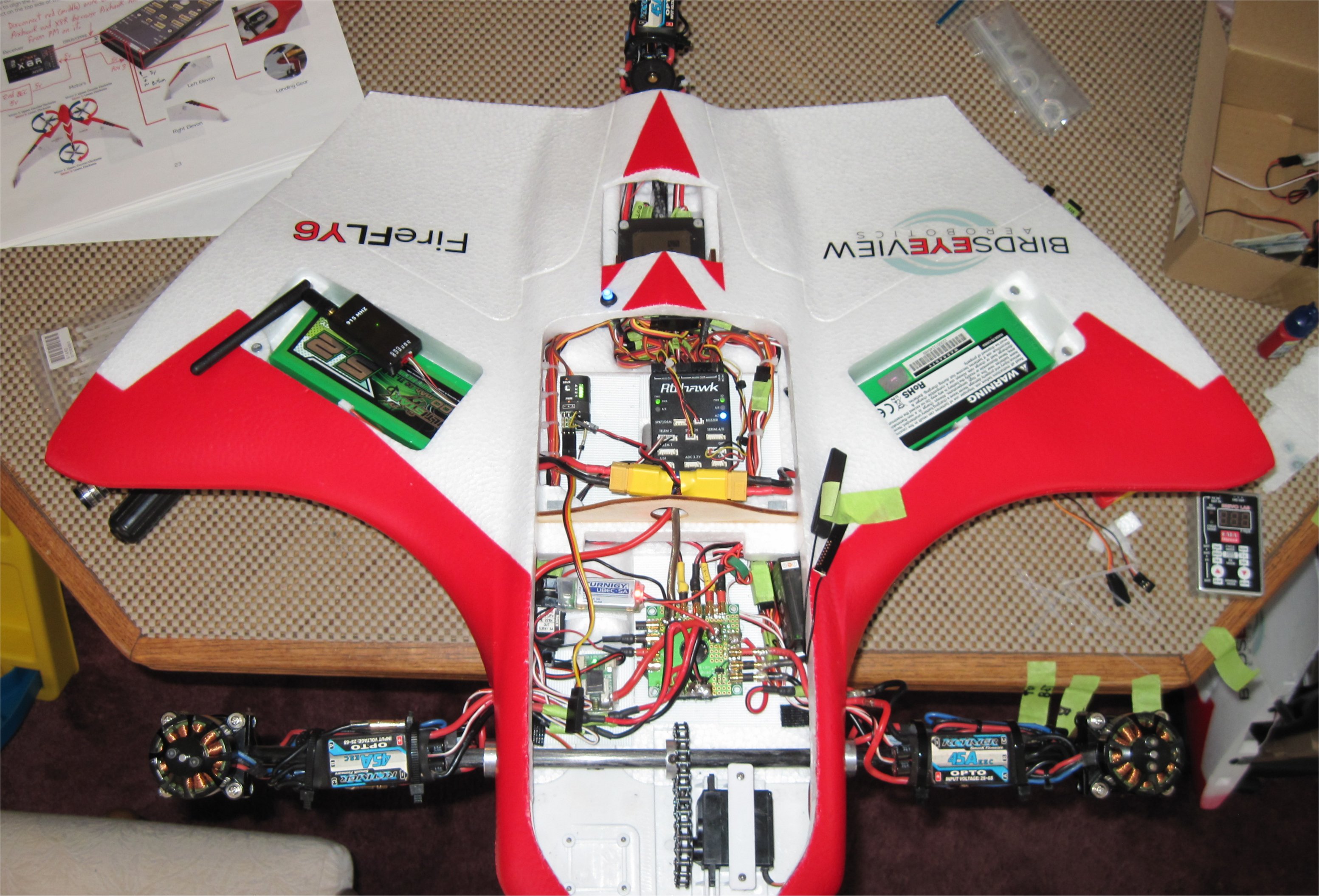
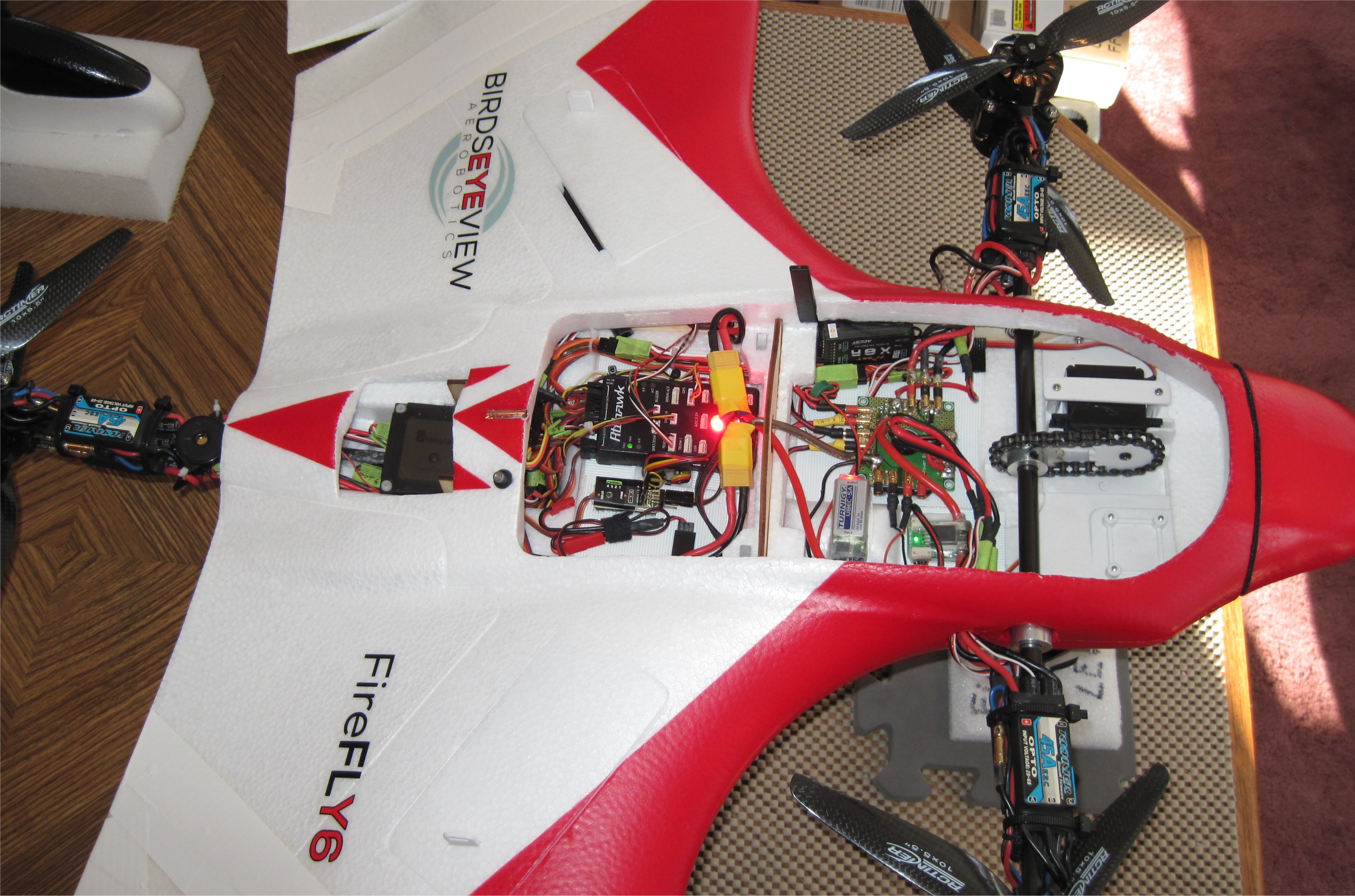
With low temperatures in the single digits and highs in the teens, I spent my holiday week off staying warm inside re-building my FF6 DIY25. Last summer, I had an autonomous flight turn 180 degrees toward the wind on take-off and then transitioned into a 75’ pine tree. I had made two mistakes, the first in not providing a clear area in all directions for transition in my flight plan and the second laying my transmitter down on a table. It was a classic “Oh S**t!” moment, so I bought a new main chassis and kept the wings and electronics.
Learning from others and from previous builds, I decided to cut a hatch in the tail to help feed the aft power system wires and try to hide my GPS. I hope it works without getting interference on the GPS and Compass. I also used a thin layer of Beacon Foam Tac to keep my Velcro from peeling off. It seems very secure!
I kind of built things backwards this time by routing most of the wires first and then adding electronics. By cutting away a section of the foam in the center plywood area, I created extra space for the Pixhawk and main XT60 power plugs. I replaced my broken transition servo with a JR DS821 that I had on-hand.
Everything checks out and works so my plan is to initially fly it using AvA and my Mapping Key. Once satisfied with the operation, I will change it over to APM.
In case anyone is interested, a guy in Canada is selling a never flown FF6 DIY25/Pro for a great price!
Happy New Year!
Hello, Can someone please help. I live at the Gold Coast Queensland and I need a person very familiar with pixhawk parameters. I need to get aircraft flying it is very similar to a Vectored Tail sitter. This would be paid work about 2 days. Anywhere around coast??
@Buzz is relatively close by (Brisbane), and one of the most experienced people you could hope for.
If he isn’t available, I’d suggest making a dedicated post rather than have your request lost in the comments here.
Thanks James, I will see if he is available.
I flew my FF6 DIY15 for the first time this year in some pretty good wind. Everything worked great except the transition from QSTABILIZE mode to FBWA mode seemed to take a long time before the wing was flying. Once it started getting some speed, you could hear the motors accelerate and it was off flying very nicely. No issues on the transition back to QSTABILIZE mode.
The differences between my perfect flights last Fall and this Spring are higher winds and a firmware upgrade from v3.8.2 to v3.8.3. My Q_TILT settings are the same. I am not using an Air Speed sensor.
Q_TILT_MASK,54
Q_TILT_MAX,45
Q_TILT_RATE_DN,20
Q_TILT_RATE_UP,40
Q_TILT_TYPE,0
Q_TILT_YAW_ANGLE,0
My question is about the increased wind conditions. Will higher wind cause a slower tilt down rotation because the GPS speed is showing a very slow moving vehicle? Could this behavior be eliminated by adding an AS sensor?
Cheers!
Dear all.
I tried Arduplane 3.9.1 on FF6 DIY25.
In Heli mode, it works well except for yaw. Yaw has a bit of vibration
I tried FBWA from QLoiter. This video shows the test flight.
https://youtu.be/GKjM2dV4y54
Immediately after the transition, the roll began shaking.
The aircraft was about to collide with another car, I cut the throttle and dropped it.
The damages are broken nose and broken propeller. There was no big deal, the repair was over.
However, I do not know the cause of the roll.
Could you give me advice?
Thank you.
This is the flash data.
Did you mean to attach a log file? I don’t see one
Oh, as you pointed out, I missed attachment file.
Size is too big.
I prepare DropBox.
2018-10-08 12-06-50.bin
This really looks like reversed elevons. Can you describe the way you tested the elevons on the ground in FBWA mode before takeoff?