Hi, tridge,
Yesterday, I checked elevon motion, and it seemed OK.
When I tilted the aircraft to the right down, right elevon moved to down, and left elevon moved to up.
I’ll take video.
Hi, tridge,
Yesterday, I checked elevon motion, and it seemed OK.
When I tilted the aircraft to the right down, right elevon moved to down, and left elevon moved to up.
I’ll take video.
thanks, that looks correct, thanks for the video.
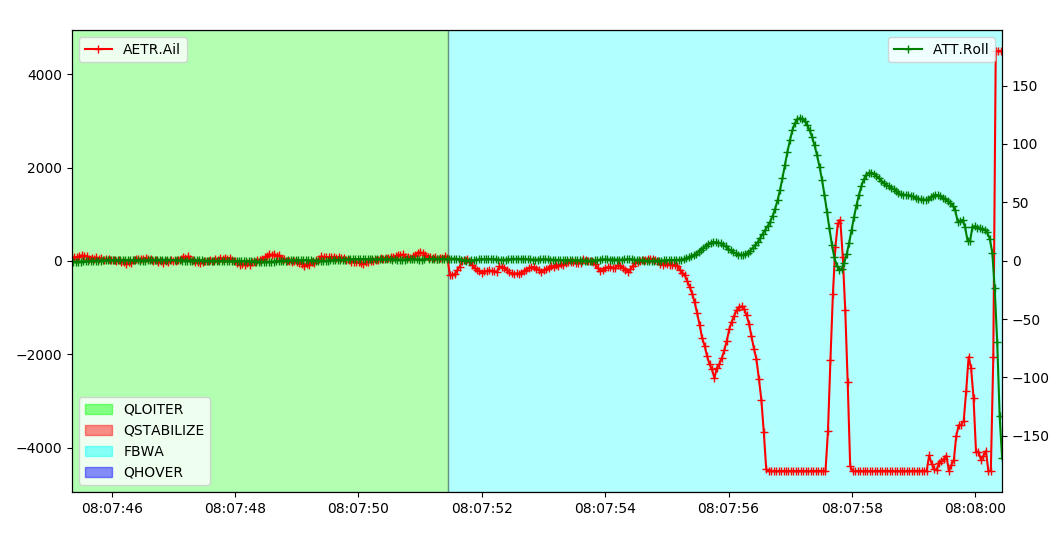
So now we’re left with aerodynamic effects. The logs show that the ailerons (actually elevons) went hard left while the plane rolled right:
That is the best I can suggest. I hope the flight goes better next time!
Cheers, Tridge
Dear Tridge,
Thank you for conducting detailed analysis.
I agree with your advice.
I will test flight based on your advice.
Since I have a business trip this weekend, I will test the next Tuesday morning.
I will inform you of the result.
Thank you very much.
Dear Tridge,
Today, I finally tried Transition.
I used the parameters that I was taught before.
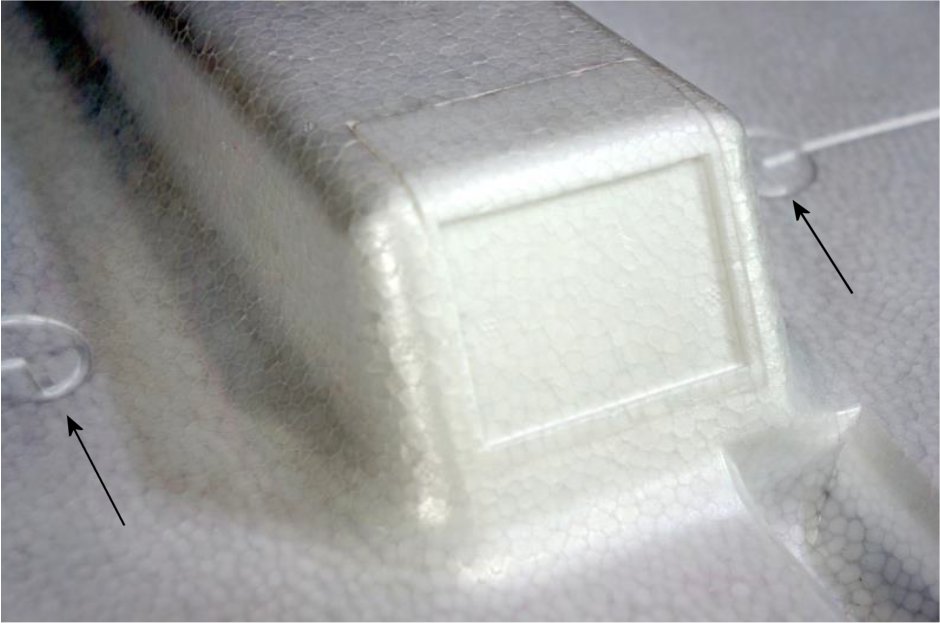
Firstly, there was no problem when there was no winglet, but when hovering with a winglet attached, vibration in the roll direction took place. Therefore, when Q_A_ANG_RLL_P was changed from 4.5 to 4 and Q_A_RAT_RLL_P was changed from 0.4 to 0.25, the vibration disappeared.
Next I switched mode from Q_Hover to FBWA.
For the first Trainsion try, the speed did not rise and Transition did not end.
I am wondering if there are parameters that keep the speed down,
Q_A_THR_MIX_MAN and Q_A_THR_MIX_MAX have been changed from 0.5 to 0.6.
For the second Transition try, when throttle was fully opened after changing mode, Transition ended after 32 seconds, and it became an airplane.
Is it OK with this parameter change?
Also, when returning to Q_Hover and turning to the right at yaw, the propeller at the upper right stopped. The propeller did not stop before FBWA. Why?
For the time being, I could transit my FF 6 safely and fly as an airplane.
Thank you very much.
hii gregcovey ,where is the CG points for it ?
Around 330 mm from nose tip?
Old thread… ![]()
We got a FireFLY6 (kit from 2014) converted to the 6S-setup (TigerMotors motors and propellers) and a Pixhawk “1”. Are there any downloadable AvA 2.4 anywhere and the FireFLY6-planner… or a firmware used with Mission Planner?
Why not install the current Plane 4.3.0 stable and parameterize it according to the WIKI QuadPlanes — Plane documentation . There the Firefly is supported as Y6 - frame type.
hi, my name sandy. anybody can help me ? i got my mission planner 1.3.74 when starting with Firefly6 pro firmware 4.3.0, mission planner came out by itself. does anyone know the problem? Thank you
Hi,
I’m currently working on the Firefly6 and want ask you if anyone has the original Firefly6 mission planner
software that they could send me. I would be soo greatly appreciated.
Thank you, Tom