Thanks for the information on those Aeronaut prop hubs. It makes me glad my DIY25 uses t-style props.
just noticed this video:
nice to see another one converted!
yes, that mine 
hope you can help my problem during transition.
sure, did you post the DF log somewhere?
ahh, I see it, sorry for not noticing earlier! I’ll have a look
1 Like
Congratulations! I couldn’t see the transitions on video so we’ll see what Tridge says about the logs. Can you describe what your problem was during transition?
I am having some issues getting my landing gear to operate properly from my radio control, I can toggle it in servo tab in MP and have it go up and down but cannot use radio. I have it all plugged in according to this with everything:
Left Elevon = Servo 1 = 77 = MainOutput1
Rightt Elevon = Servo 2 = 78 = MainOutput2
Motor 1 = Servo 3 = 33 = MainOutput3
Motor 2 = Servo 4 = 34 = MainOutput4
Motor 3 = Servo 5 = 35 = MainOutput5
Motor 4 = Servo 6 = 36 = MainOutput6
Motor 5 = Servo 7 = 37 = MainOutput7
Motor 6 = Servo 8 = 38 = MainOutput8
Retracts = Servo 10 = 57 = AUX2
Tilt Servo = Servo 11 = 41 = AUX3 (Note that this is normally AUX1 on AvA setups)
But when I look at Servo10_function 57 it says it is RC7IN, and gear says its function 29 I am running MP 1.3.50.8. I have my Right slider setup to Input10 and mixer 10 on my taranis. Am I missing something or just having a brainfart?!
SO,
I was able to get my remote to trigger landing gear by changing servo10_function to 60 which is rc10in makes sense but now when I set servo 10 from high to low using mission planner it will not toggle it at all, is this not possible to be able to use both radio and MP. Also is there anything in the FF6 code that allows you to set a height at which you would like the landing gear to go down kind of like the inspire from DJI does?
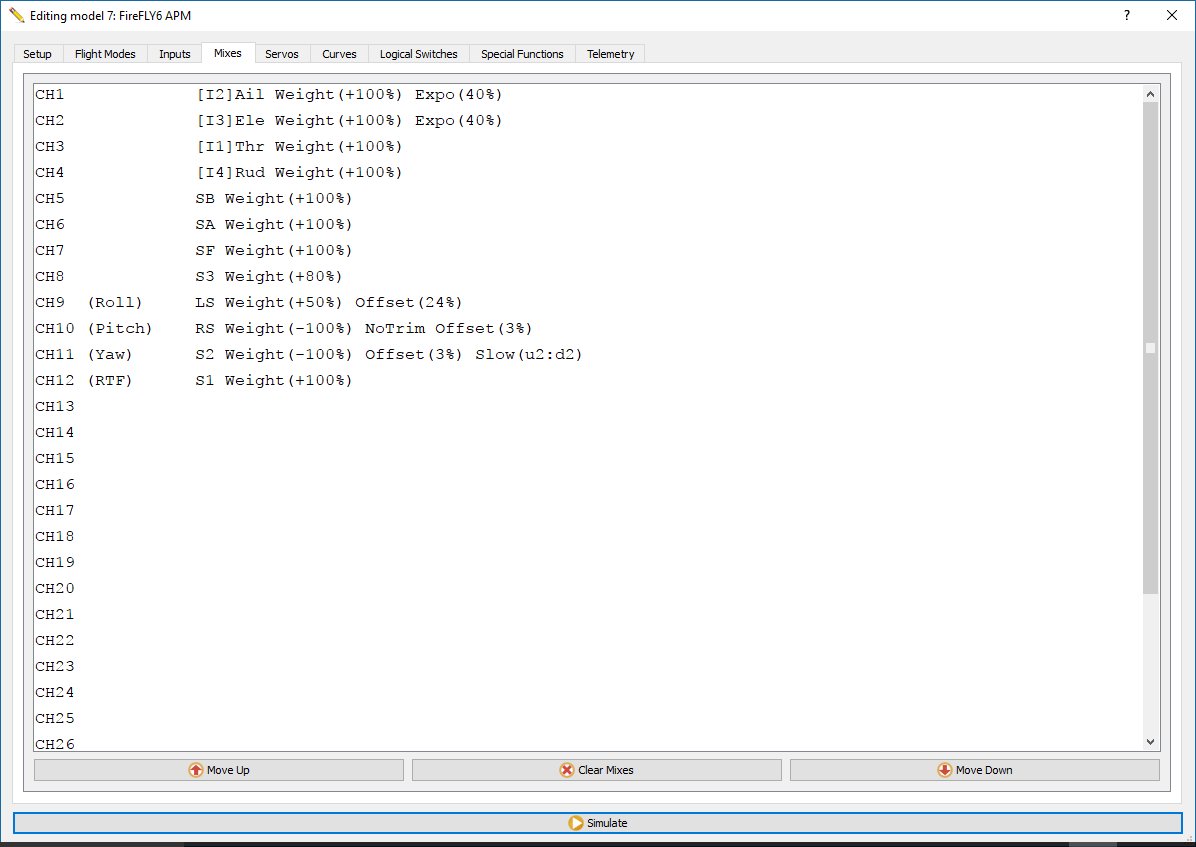
This is correct. You want SERVO10_FUNCTION set to 57. You want to control the gear using RC7. I use switch SF. I posted my Taranis settings in the first post but below you can see my mixes.
Are you able to control your gear from both RC and MP while using that setting. I have mine on RC11 in taranis hence the reason I had to use function 60 instead of 57, no big deal just different layouts is all. My main concern is that you will be unable to control gear using MP unless you do a do set_servo function but I am still unsure if that will work considering I cannot activate gear from Servo screen in MP. Greg can you actuate your gear using your setup in servo screen, also is there a setting on this to have gear activate at specific height like there was in AVA (hated that software but did have a few decent quirks)?
I can’t remember if I actually tried the gear through MP, only the Taranis. I’ll see if I can get to it this weekend. If not, the following weekend is a long holiday so I should have time. I haven’t done any autonomous testing on the APM FF6 yet. AvA rolled gear changes into the autonomous transitions which was nice.
Maybe @tridge has done it.
I am running 3.8.2 on our FF6, and cannot for the life of me get our GPS to get a fix, I did read this post GPS Issue 3.8.2 but still am at a loss of what is going on. I have tried 3 different GPS’s and even taken out the I2C splitter and hooked it directly into the pixhawk I2C and GPS connection. We also have a second GPS emlid reach, that we send corrections to although i was not injecting GPS, I have never had an Issue of not getting our first gps to get a fix. Here is a copy of our param file maybe I have something setup incorrectly but I have looked over it many times. Shouldn’t the GPS automatically configure your serial port for the correct baudrate if you have gps_type1 to auto config?FF6_3.8.2_V1.param (16.0 KB)

3D designed mount for Sony QX1 will fit internal behind the fuselage divider, it is triggered by a seagull rc Mapx2 camera trigger allows for it to be turned on and off as well as the QX1 keep alive feature. We have upgraded the power pack to 2x 6S 5200mah as well as the larger props that come with the pro version.
Problem Solved: upgraded to 3.8.3 and immediately got a GPS fix on GPS 1 while pixhawk was powered using USB once I switched to battery power it loses fix, and it keeps dropping fix and my hdop will not go below 99.99. I will continue to investigate further. Upon further investigation I have noticed that our power module is acting very strange jumping around ±2 volts and has a constant amp draw of 3 to 4 amps. I am wondering if this is causing the gps to fail configuration while using battery power. This power module is just one of the cheap ones that comes with pixhawk.
Check for a 5v collision between the Power Module and the external BEC for the servos. This can happen if your receiver connection doesn’t isolate 5v on the SBUS connection to the Pixhawk. Either power the receiver by the SBUS connection or by an external 5v on one of the spare channels. The Pixhawk RC Out and SBUS pins have the PM 5v on them. The Main Output and AUX Outputs should be powered by an external BEC.
Cheers!
i try again today and you can view here the problem "shaking transition"
https://www.youtube.com/watch?v=AEOXAPmWO-A
not high-res but enough to see the problem
Yes, I saw the rocking back and forth during the transition. Was the transition into the wind and your throttle setting 50%-75%?
Also, it looked like you went inverted on the return path. Did you have trouble flying in FBWA mode or did you just happen to transition back to QSTABILIZE mode with the wind at your tail? A tri-copter wing design like this does not handle wind behind it when hovering.
Cheers!
yes to the wind and throttle about 70-80% but still shaking.
i turn to the left during transition bcos already too far away from me, but wind make the plane stall spin, lucky i can recover back using QSTAB and transition again.
What battery packs are you using? 3s 5200mAh packs or maybe 6s 5200mAh packs?
To increase your turning angle, you can change MIXING_GAIN from 0.5 to 0.7. Be sure to have sufficient speed after transition before turning with too much angle.
What is your current Q_TILT_RATE_DN setting? I didn’t get a chance to play with mine but Tridge mentioned that you could increase it from 20 degrees per second to 40 for a faster transition. Try using 30 degrees per second first.
Hopefully, Tridge will see your video and comment.
i use 3S 4500 pack, my current Q_TILT_RATE_DN is 60
60 may be too aggressive. Tridge’s initial setting was 20 degrees per second and I had flawless transitions using that setting other than it being a bit slow. Did you start out with 20 and not like it?
yes, i start with 20 on my first maiden but too slow also rocking forth and back
change to 40 also same and 60 today
Ok, that’s good information. It sounds like the rocking is there even when changing Q_TILT_RATE_DN settings from 20 to 60. Perhaps Tridge can detect the issue in the logs. My guess would be that you can try changing the YAW2SRV_DAMP from 0 to 0.25 or 0.50 and see if the rocking stops.