Hello,
I have built myself a quadcopter with Holybro X500 frame, Pixhawk Cube, Holybro telemetry 433MHz SiK radio, 30A ESCs, 10-inch props. I use QGroundControl, Arducopter with ChibeOs.
Could you, please, help me fine-tune it, look at the latest log and try to find possible issues? This is my setup:


Initially, I crashed several times, broke legs and props in manual mode. Once the quadcopter even flew away in LOITER mode (the GPS pole broke). After I fix it, according to my layman’s opinion, I think it flies like a dream! Albeit I must say I do fly it in AUTO mode mostly.
1) Could you, please, help me look at the log from the latest (successful) flight? Even though everything went smoothly I do have some concerns.
http://padoli.com/flight/sample_log2.bin
I started in LOITER mode, let the drone hover for a few seconds and if everything looks stable I switch to AUTO mode.
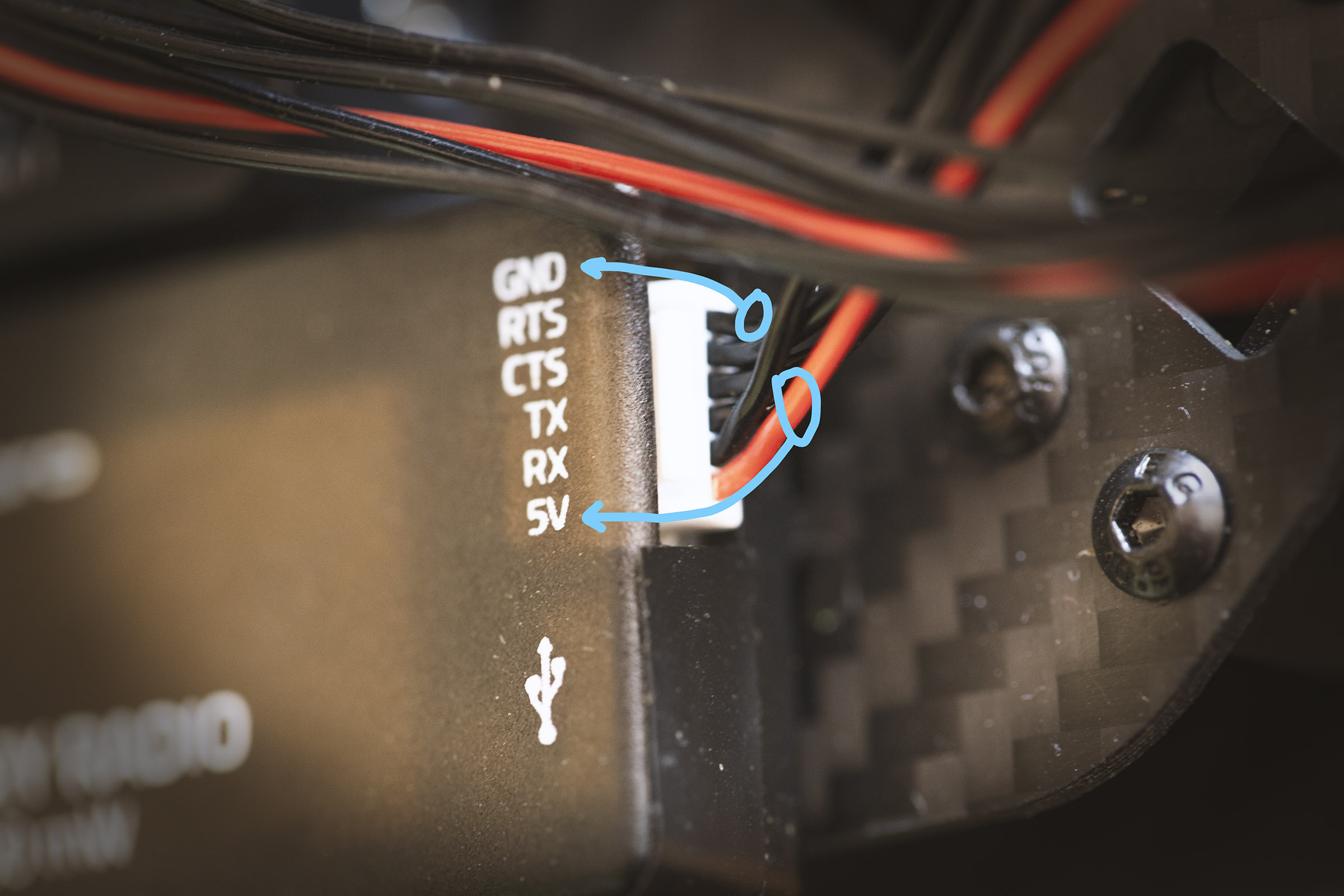
2) My SiK radio does not stay connected. It frequently disconnects and I can barely see the location in QGroundControl. What could be the problem? I never had a flight where I would get the telemetry to my QGroundControl without interruption even for short flights.
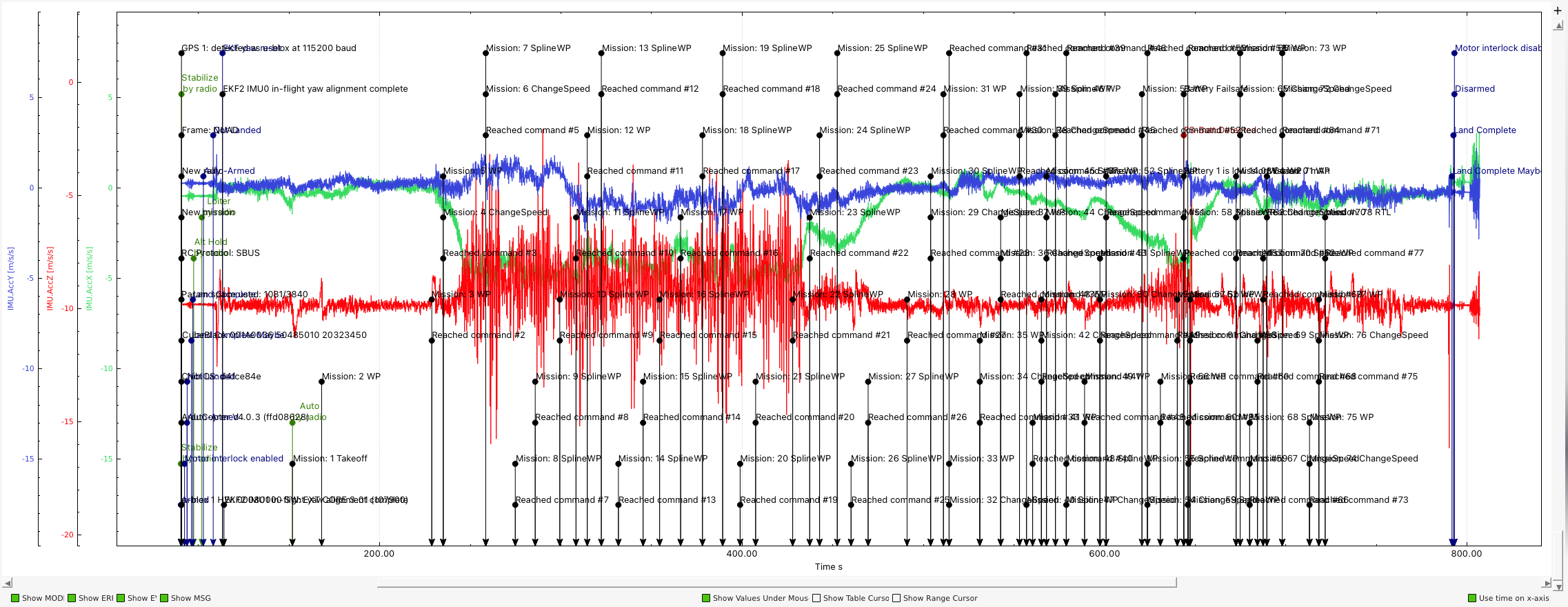
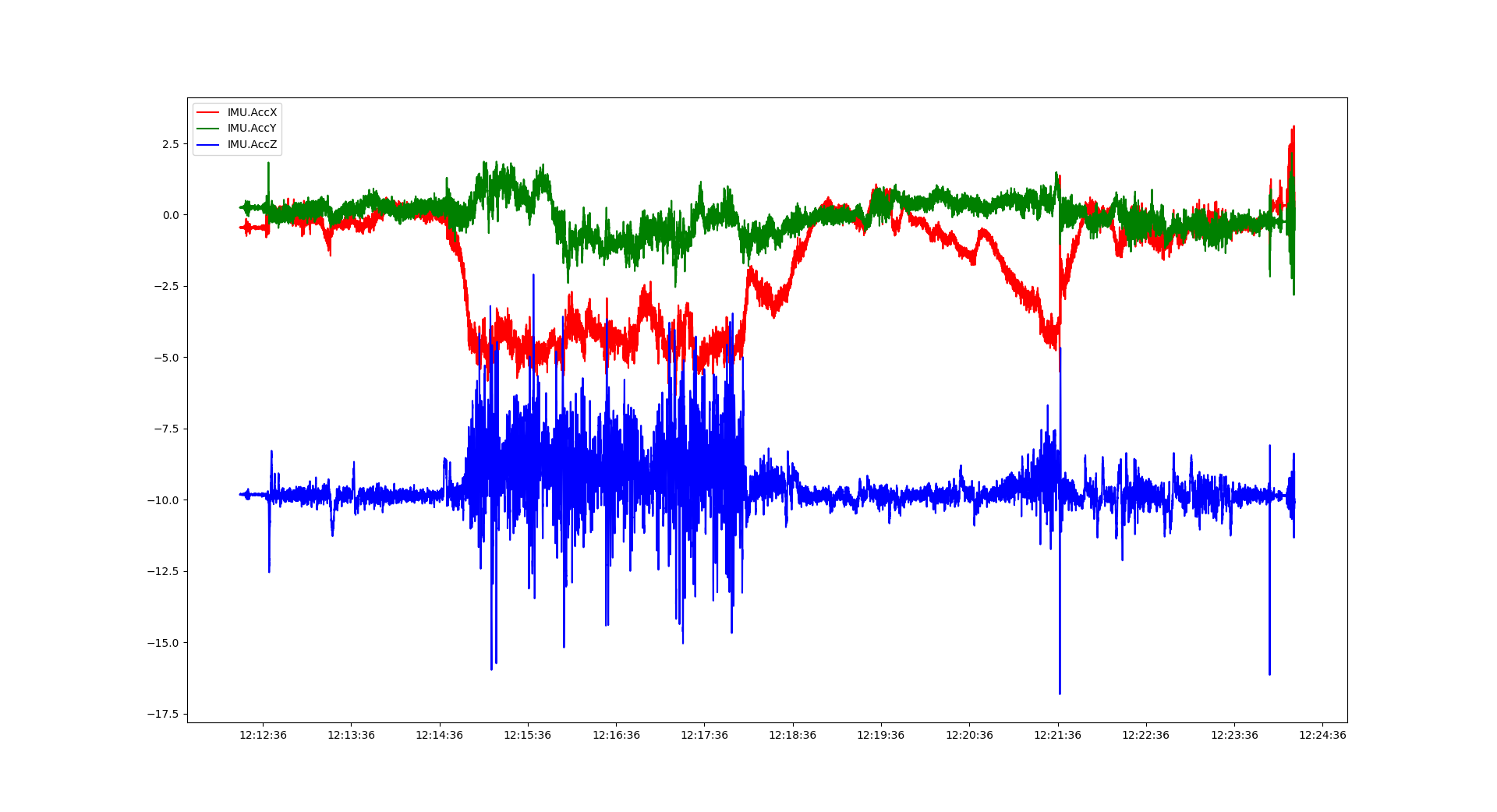
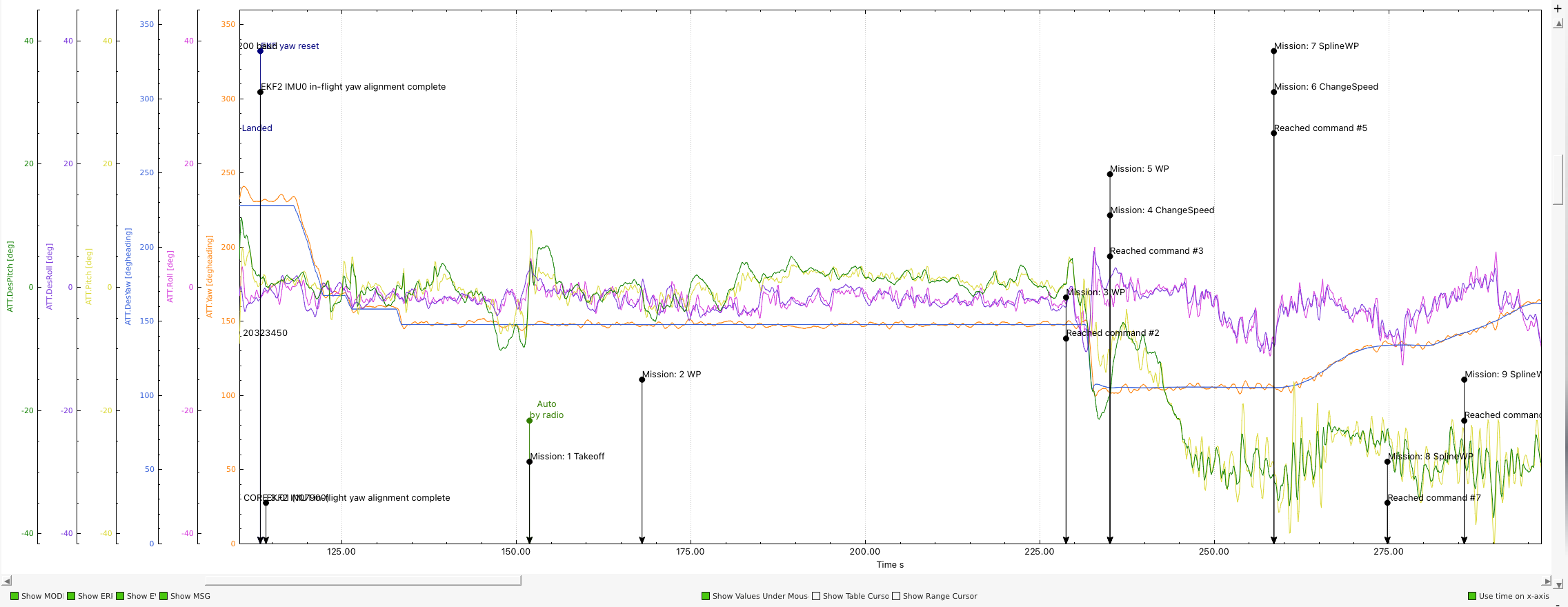
3) I don’t know how to interpret this IMU chart from the given log file. Is it all good or do I need to be worried?
4) I have never done an AUTOTUNE. Is it something I need to do? Or is my quad good and safe to be used as-is?
5) I have imported the given log into MissionPlanner on my Windows machine and ran auto analysis tool which gave me this result. I don’t know how to interpret it well:
> Vehicletype ArduCopter
> Firmware Version V4.0.3
> Free Mem 0
> Skipped Lines 0
> Test: Autotune = UNKNOWN - No ATUN log data
> Test: Brownout = GOOD -
> Test: Compass = WARN - WARN: Large compass offset params (X:28.38, Y:-246.97, Z:199.19)
> WARN: Large compass offset in MAG data (X:28.00, Y:-246.00, Z:199.00)
> mag_field interference within limits (9.33%)
> Test: Event/Failsafe = FAIL - ERR found: FS_BATT
> Test: GPS = GOOD -
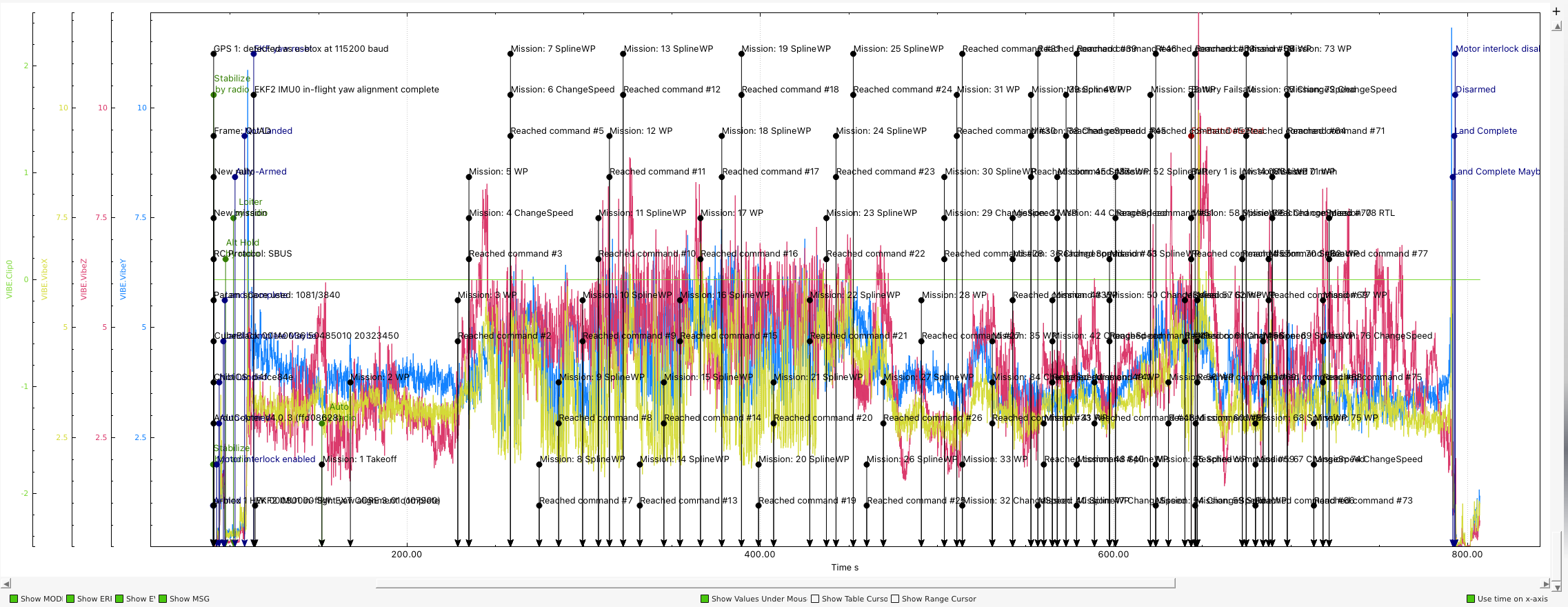
> Test: IMU Mismatch = WARN - Check vibration or accelerometer calibration. (Mismatch: 0.96, WARN: 0.75, FAIL: 1.50)
> Test: Motor Balance = WARN - Motor channel averages = [1549, 1582, 1654, 1666]
> Average motor output = 1612
> Difference between min and max motor averages = 117
> Test: NaNs = FAIL - Found NaN in BAT.Curr
> Found NaN in BAT.CurrTot
> Found NaN in BAT.EnrgTot
> Found NaN in CTUN.TAlt
> Found NaN in CTUN.DSAlt
> Test: OpticalFlow = FAIL - FAIL: no optical flow data
> Test: Parameters = FAIL - 'MAG_ENABLE' not found
> Test: PM = FAIL - 67 slow loop lines found, max 7.67% on line 62667
> Test: Pitch/Roll = GOOD -
> Test: Thrust = GOOD -
> Test: VCC = UNKNOWN - No CURR log data
As you see, there are some fails and warnings and I have no clue how serious they are.
Conclusion. The quad flies well and besides the dropping connection to my QGroundControl over the 433MHz radio everything seems to be working. But I crashed in the past and I would like to avoid it and solve any potential problems that may arise now. Can you guys help me double-check everything? I want to have a dependable quad ready to fly safely at any time. Many thanks!
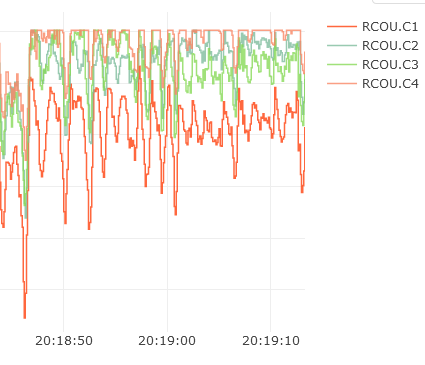
 I guess there will always be some imbalance?
I guess there will always be some imbalance?