Great photos! I’m sorry to see your fit issues. It looks like you are using the 12s Flame 60A ESC. Keep in mind that my Fighter hovered at 1300 watts or 15A per 6s ESC. My prediction is that you will be around 7-10 amps per ESC which makes for quite a large headroom in your 60A ESC.
Anyway, I am glad that you are letting us follow along with your build and wish you a good experience.
I’ll try my best to share details that would be helpful to others doing the 12S version without having all stock MFE parts.
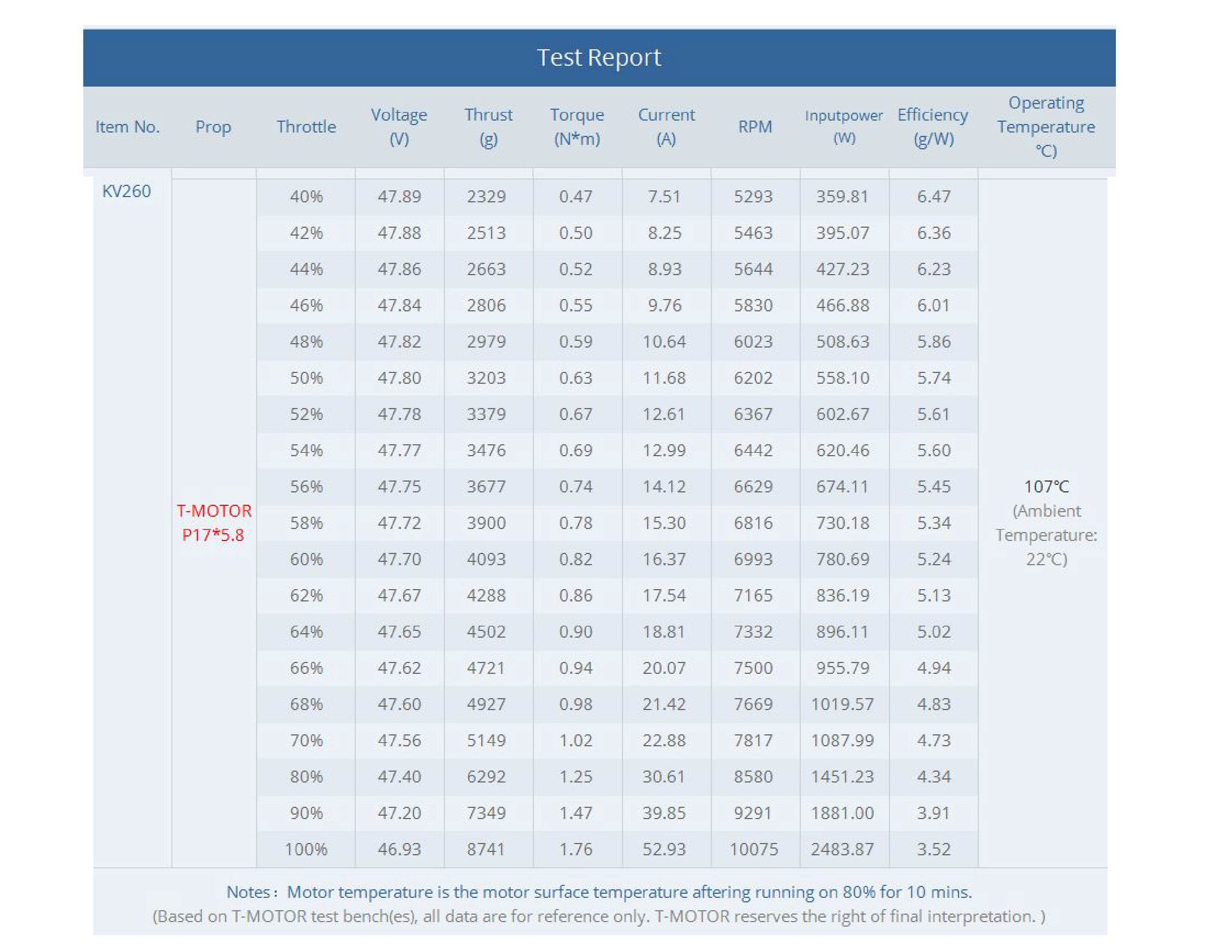
I agree, 60A is a large cushion for hovering. The provided TMotor bench test numbers estimate 10.6A for hovering on my build at an MTOW target of 11.5kg (3kg thrust per motor). The V505 motors are capable of exceeding 50A which is probably why a 60A 12S ESC is recommended by TMotor. I did find a 40A HV 12S ESC online (see below) but anything under 60A is rare and 12S part choices are somewhat limited.
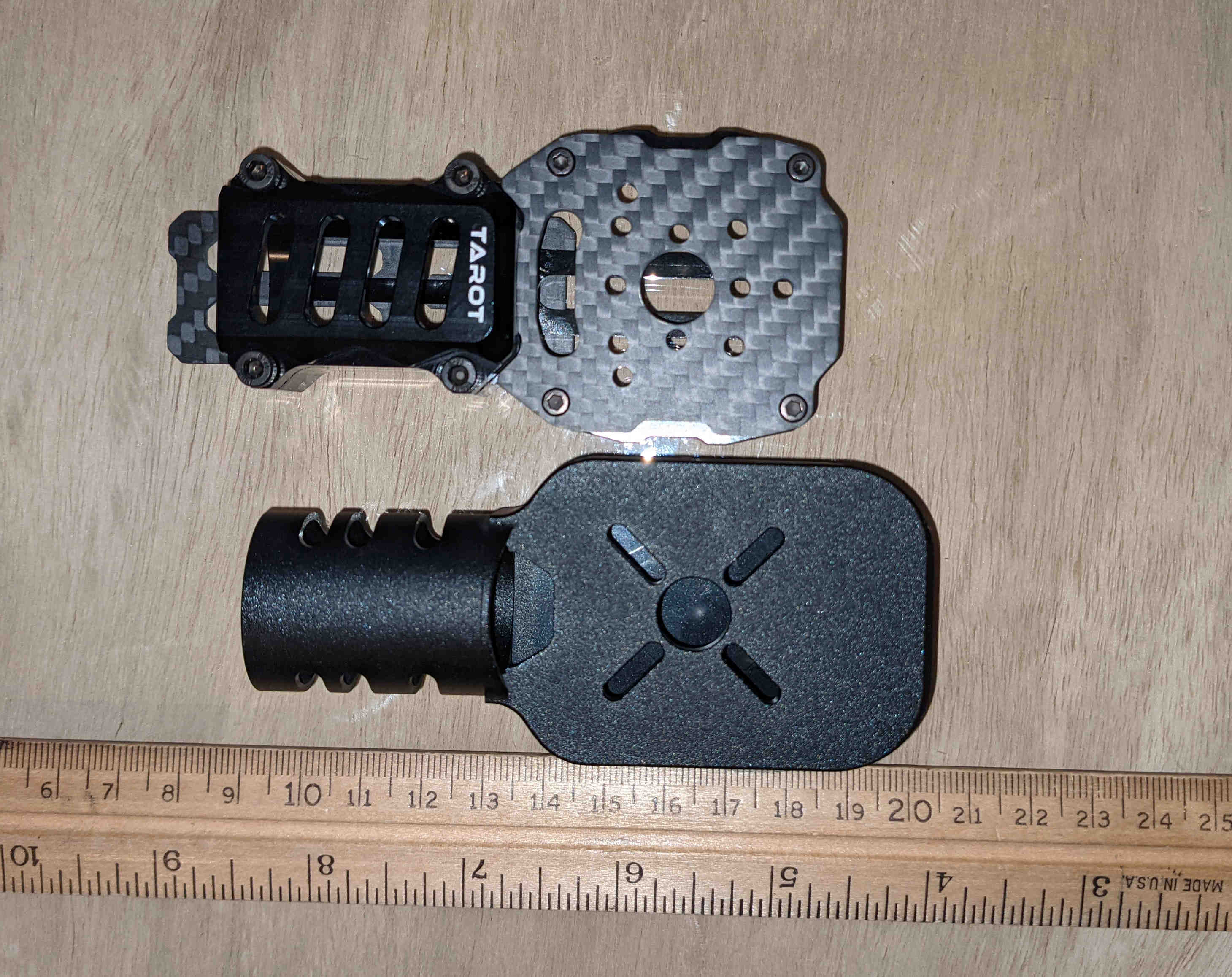
The stock MFE motor mount (53g each) has an internal space of 64x34x18mm if you stay inside the protrusions of the pre-tapped screw holes for the width dimension. The stock MFE ESCs are a pcb (capacitors hidden in photo) that use the motor mount bottom plate as the heat sink. The design is slick, not sure how well the heat dissipation is as the heat sink fins don’t have much surface area. It’s better than a smooth surface I suppose.
Image: stock MFE ESC
The only low Amp 12S ESC I’ve found is the CC phoenix edge (https://www.castlecreations.com/en/phoenix-edge-hv-40-esc-010-0107-00) at a size of 46x43x21mm which is too wide and deep for the MFE mount. Unless you use the MFE 12S ESCs, it seems you won’t be able put an ESC inside the stock mounts.
After a lengthy hiatus, I am back to building a drone. I was licking my wounds from a dramatic crash last year and was distracted by losing money day trading. Way too time consuming and stressful.
Thanks to all the contributors to this thread and community. This is a vibrant and great community because of you.
Based on this thread, I decided to abandon my Freedom VTOL build for a Fighter 4 + 1 build. So far, I am very happy with my choice. While unpacking and examining the Fighter, I am please to see a few changes. Perhaps the one I like best is the channels in the wings that provide easy access to run wires out to the ESCs and aileron servos. That was a challenge on the Freeman. I also like the fit of the components.
My plan is to build a survey drone that can fly 1,000 acres on one battery. To help achieve that I am thinking of going with a 12s setup, probably 2 6s batteries in series. For the moment, I plan to carry a Sony A6000 but will likely upgrade to Sony RX1R if we see good performance. I have a Black Cube but recently learned the orange is now the standard and a better choice. I am considering the Blue which would allow us to pursue government contracts. The images will be geotagged with a custom built ublox F9 data logger post flight with PPK.
The goal is to use high quality components, so we are considering t-motor engines and ESCs instead o f the ones recommended by MKE. I expect my UAW to be around 8kg but want to build to 10kg to provide headroom for alternate sensors. After spending considerable time on ecalc, I am thinking of going with the t-motor MN601-s KV170/20x6 propellers and the FLAME 60 amp 12s ESCs. Ecalc is showing max amp per engine at 33.43 with projected hover amperage at 10.17. Thrust to weight is 2.2 at 10kg. So, as suggested by Greg, 60amp is overkill but I don’t see another t-motor option. Is the quality of the t-motor esc worth the overkill?
This all looks pretty good to me but would love hear thoughts from other builders in the trenches.
Bravo! I’m happy to see you back in the saddle again…so to speak. If you are building a high end VTOL, Christian is the guy to talk to. My whole power system was about the cost of just two of his ESCs so I still build my VTOLs for hobby use with Pixhawk v2.4.8 units and a $20 GPS.
Again, that’s an eye of the beholder question. You may want to look into the fit issues that Christian has had to deal with before deciding on a motor and ESC.
Have you made any decisions? It would be nice to use the provided engine mounts. I am hesitant to buy the MKE ESCs because I know nothing about them and the components are essential to a reliable build.
After getting most of my parts in and doing preliminary test fitting, I felt like it was time to tackle building the airframe. I’d held off just in case I had to do some special modification in a tight space. I used a little more than one tube of the Hobbyking foam glue (https://hobbyking.com/en_us/clear-foam-glue-medium-cure-large-100ml.html) but I think you can accomplish the task with a single tube if you are not wasteful.
A few lessons learned for next time:
Be deliberate and decisive. I’m not sure if it was the dry Utah air or what, but the glue got tacky in about 30 seconds meaning brushes were useless and I couldn’t smooth out beads very well. Watch the MFE videos beforehand to make sure you know what goes where and when.
Have a bottle of acetone for cleanup. This glue sticks to everything and makes a mess if you’re not careful.
Don’t over-apply the glue. See lessons 1 and 2.
Be very careful gluing the hinges. This glue oozes a bit and it didn’t take much to gum up the hinges on the tail. Fortunately, I was able to carefully clean up the moving pieces with acetone and Qtips.
Tape sections as you go. The glue doesn’t hold fast so parts can slide apart if you’re not paying attention.
I have been working from home so I had to commandeer part of the living room to do the gluing. We’ve been having strong winter storms lately (20" in the last 24 hours) so garage space was at a premium. I ended up using our 6’ plastic “crafting” table which worked out well.
After debating the cruise motor mounting situation, I decided to modify the plexiglass so that I could access/remove the motor from the stock aluminum base. The nose cone is a tight space and hard to see into which is why Greg decided to mount his cruise motor before gluing the airframe to save the hassle. I very slowly reamed out the inner slots with a drill and 3/8" metal drill bit (smoother tip). I wouldn’t suggest doing this unless you’ve working with plexiglass before. It can easily crack if you force the drill bit, even more risk if there is already a hole.
The only parts I have not glued are the wing plates to the body. I need to make some sort of a battery tray and sling load anchor for my sensor payload. As it sits, the carbon fiber tubes that connect the wings through the body are removable but they will be glued after I find a solution. This affords me some time to design a support piece such as a vertical tab of carbon fiber that the tubes can pass through and I can avoid dealing with extra mounting tube clamps/hardware.
I’ll post some photos of a mock setup now that I can balance the VTOL.
Thanks for this detailed post. Apparently, I didn’t read it thoroughly the first time. The good news is we independently concluded the MN601-S KV170 is a good choice for VTOL engines. Thanks for the steer to the integrated kit. Seems like a great solution. Perhaps I missed it in a subsequent post, why did you go with the individual components? Seems like the integrated kit would solve your mounting problems.
I am a bit concerned about your 1.5kg senor hanging 5 m below the airplane - that’s a long moment arm. Structurally, it’s going to add significant stress to the airplane, especially when swinging. Additionally, I don’t know how the flight controller will respond to the motion of the sensor. A quad has 4 engines that can quickly respond to counter the motion of the sensor. In plane, the control surfaces are all you have to counter sensor motion. I don’t know if you’ll have sufficient control authority (aileron deflection) to counter the motion of the sensor. The final concern is resonance. I wonder if it’s possible to get into a dynamically unstable situation, where oscillations grow instead of dampen, like the famous Tacoma Narrows Bridge.
I agree. The HK “jiao shui” glue was not as thin as the glue used in the MFE videos. I ended up ditching the brushes and just used it direct from the tube. Even then, it was fast to set.
Both the plane and the dogs are looking good!
Dave,
The Fighter 4+1 PIDs in the param file below should be good enough to start with. At least they seemed ok on my short test before winter arrived. If you have an issue, I can help with suggestions on what to tweak.
Hey David, we ordered the electronic package from MFE, and I can attest that their products look quality…note, we have not fired them up yet. The ESCs are branded tmotor, and the motors come in similar tmotor packaging, so I would not be supprised if they were made by tmotor as well…we went this route as I could purchase then using PayPal unlike Christian, and I figured why not use the electronics designed specifically for this aircraft…
Thank you for the information. Glad they appear to be quality. I’ve had good luck with T-Motor engines on my quads and trust the brand. My preference is to use MKE recommended parts but was hesitant due to unknown quality.
Thanks for the timely post as I was about to order the integrated MN601s combo Christian_H linked above, for a whopping $1,000.
How long did it take to get the electronics from MKE?
Do you plan to use the 2013 recommendation for the drive prop? I might go smaller to increase my efficiency.
Welcome back! I find a crashing drone a more “fun” way of losing money than stocks (probably cheaper too ).
*I drafted a response last night but then got pulled away before finishing it:
The MN601-S 170kV motor was my leading option until a TMotor rep persuaded me to go with the V505 kV260. The main reason I went with V505 is to minimize air drag during forward flight with a smaller prop (16x5.4 vs. 20x6). There is the potential for cost and weight savings depending on the motor mount. TMotor offered to custom make a V505 integrated kit for me but the lead time did not work. The MN601 is slightly more efficient than the V505 and since you have a lower MTOW than I do (11.5kg), I think it is a good choice. Unfortunately, the MFE stock motor mounts will not fit the MN601-S (68.8mm diameter) as the MFE mount can only accommodate up to 60mm diameter motor. They will also not fit the TMotor FLAME or ALPHA 60A HV ESCs. If you go 3rd party route for motors, I would seriously consider the 601-X integrated kits since they include a motor mount/housing and all you have to do is put it on the carbon fiber tube.
As Ian @FIT-RS mentioned, I am unable to use PayPal for this project so I was forced to look at 3rd party options. Reliable components are a high priority since my sensor payload is not cheap. TMotor has a good reputation for parts as you know and my budget was able to accommodate (fortunately). It appears that the MFE motors could be quality parts and it’s possible that they come from the same factory making TMotor.
A simple quality test could be done with a 3 channel oscilloscope and a hand drill/drillpress to look at outputs of voltage amplitude and phase shift of the motor coils. A multimeter could be used in a pinch but you won’t get phase information, however, quality/condition of motors tend to be more obvious in the differences of voltage amplitudes (all other factors the same).
For VTOL and hovering I will be using V505-260kV, FLAME 60A HV ESC with a TMotor P17x5.8. For cruise I will be using an AT4130 kV230, AT 115A ESC with an APC 17x10WE prop. All propulsion parts are TMotor and the ESCs chosen are the recommendations from the TMotor rep.
Over the years of drone building/flying I’ve watched too many crash. The last one was particularly painful. I’d rater lose $1,000 trading than witness that again! Hopefully, it doesn’t come to two lousy choices.
I am looking at the AT4125 with at 15x10 prop. My goal is to maximize flight time while maintaining sufficient t/w. Finding the right combination has been challenging. I plan to cruise within the recommended speed range (17 - 20 m/s). I think I can achieve that with the proposed set up at around 48% throttle, which is about 2200 g of thrust at 7.5 amps. It all looks pretty good on paper.
Since time is more important than money, I will like go with the 601 x. Great find. Thank you!
The sensor manufacturer strongly recommended a fixedwing over a multicopter since you wouldn’t have swinging motions when flying a grid mission due to stop-and-go at end points. Having forward flight helps to stabilize the load due to air drag being predominantly from one direction/vector. To avoid swinging and smooth data collection you’d need broad sweeping turns which isn’t near efficient on a multirotor. I should add that the recommended ground speed for the sensor is 19-20 m/s.
Ah yes, the classic example of resonant frequency. My physics teacher at Uni liked to show us the videos in lecture.
I agree with the concern of the resonance from the cable. I think that is the biggest unknown aside from air drag of the sling load and additional stress on the frame. The cabling has a braided wire loom sheathing that fits tightly and is slightly flexible though far from a wet noodle noodle. There is a separate, braided poly chord attached to the sensor housing with an anchor on the opposite end that is meant to take stress off the cable connections.
The bulk of the weight of the sling is in the cabling and not the sensor at the end point. Implication being that the weight is more distributed which might be undesirable w.r.t. resonance vs. having center of mass near the end of the sling.
I can empathize with your crash PTSD. I see building drones as far less of a gamble in the end though a lot more time and effort committed/lost.
For cruise or forward flight (FF), the AT4120 was where I started initially, checked out the AT4125, and then settled on the AT4135 since it gives me more thrust to deal with sling load drag and my build’s high MTOW. I can always drop down to a smaller motor to save weight and gain efficiency since I’m still testing the waters with this build.
The AT4125 has much lower internal resistance and a higher thrust range than the stock MFE motor, however, it is 130g heavier. From what I’ve come across in the various VTOL design rabbit holes, a thrust-to-weight ratio between 1.5:1 and 2:1 for VTOL mode is ideal. Cruise is a little harder to calculate because of wing and body lift. You need to have lift and drag coefficients which are not provided by MFE. The best we can do without flight test numbers is match stock spec’s or go slightly better. Stock MFE FF motor is in the ballpark of 4.8-5.0 kg of thrust so I think you could safely use either the AT4120 or the AT4125.
As a disclaimer, I am intentionally overbuilding my propulsion systems so I have room to play while testing and then I can step it down later if needs be.
@FIT-RS pointed out the TMotor integrated kits to me at the start of the design so I’ll give credit to him.
I plan to be doing test flights by the end of next week (weather pending) and then start collecting survey data ASAP.
My MaxxHaul Cargo Carrier arrived and it was a perfect fit for my MFE Fighter box, even with the cart wheels. Just strap it down with a few bungy cords and it’s ready to go! The aluminum frame is quite light and it also comes with a 2" receiver bar assembly (shown in last photo).
Normally, the cart fits right in the back of my Ford Expedition. The cargo carrier will allow me to bring more planes to the field or even use my smaller Ford Edge since both have 2" hitches built into the frame.
Nice. I still need to find a more permanent solution for a field case that is impact and weather resistant. I was debating getting a large camping/river cooler, gutting it, and putting most of the original shipping foam inside.