LOL! I wouldn’t call them acrobatics, more like “unscheduled rapid disassembly”.
As careful as I am, I still crash on occasion. Sometimes it is even my fault or a series of misfortunate events that I get stuck in. One time, the safety switch turned off all the servo control in flight…stuff happens!
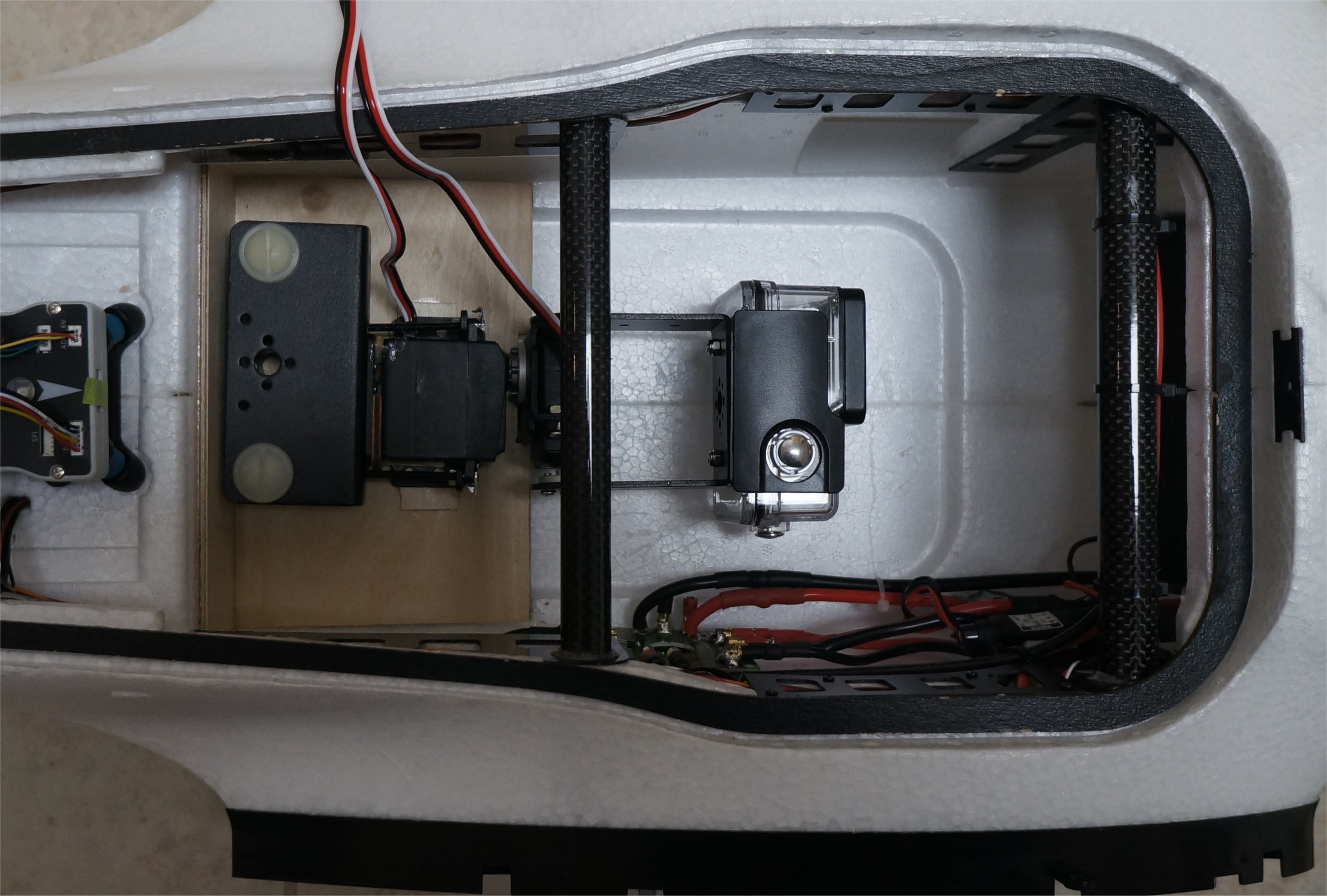
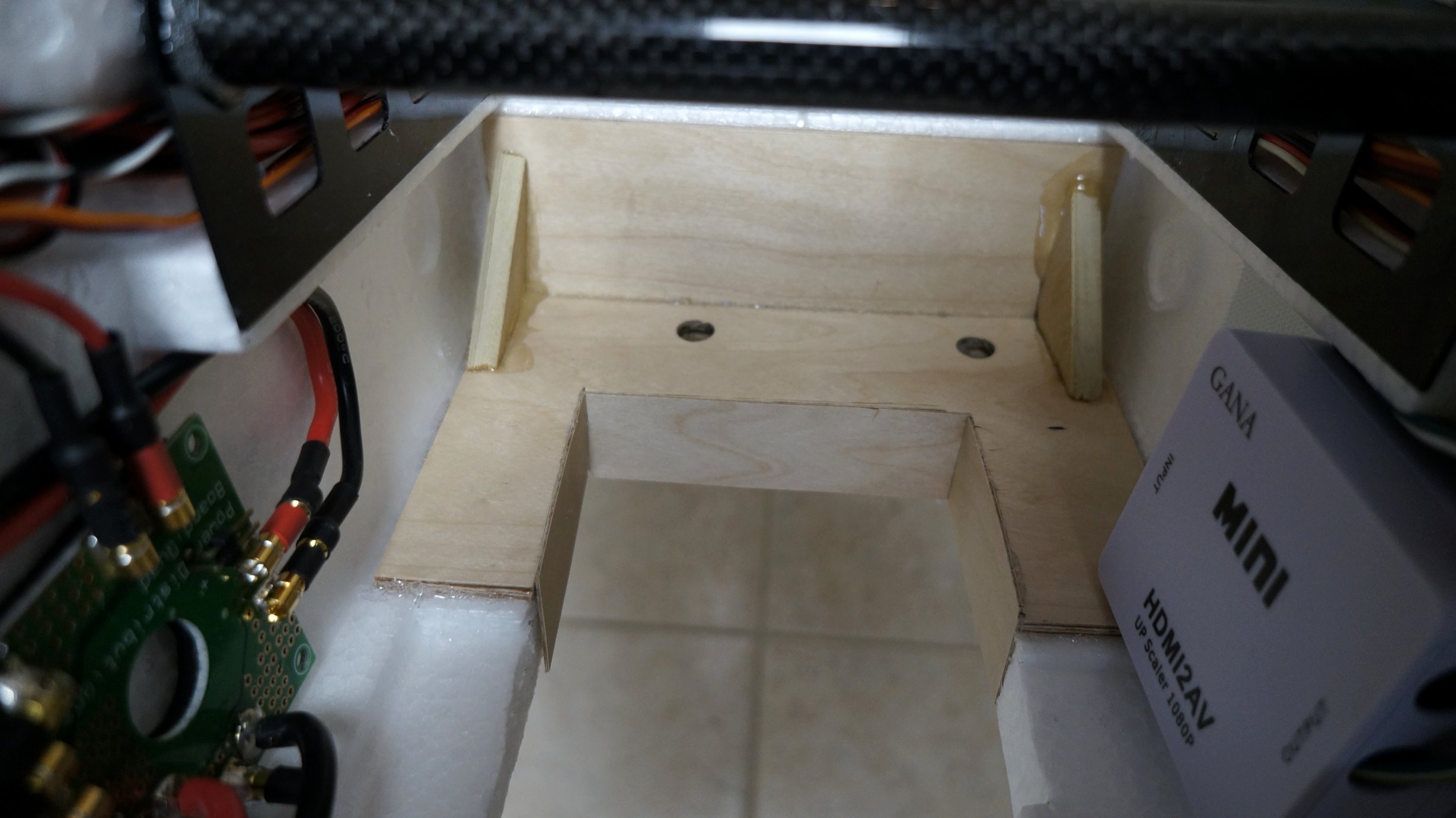
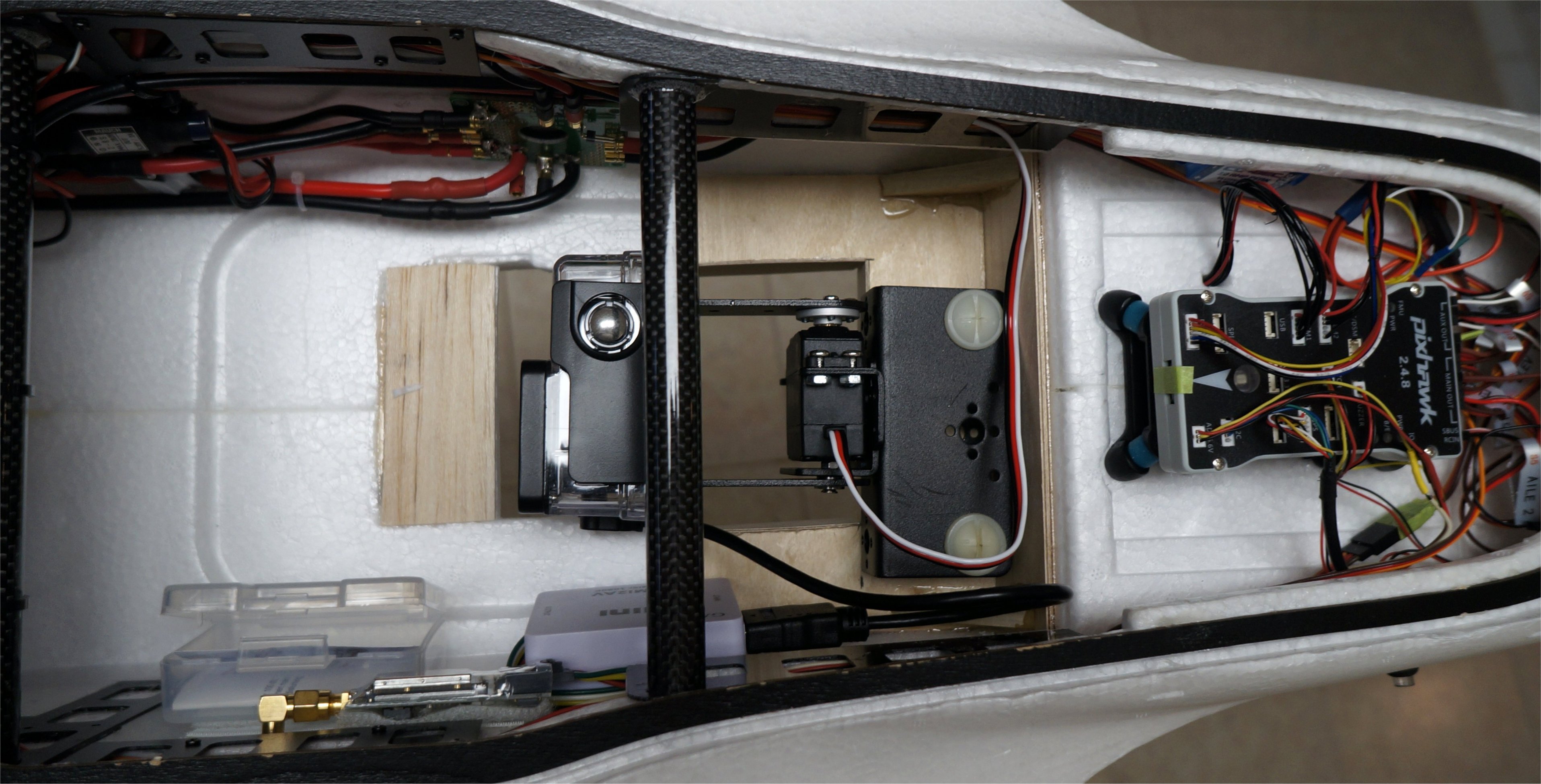
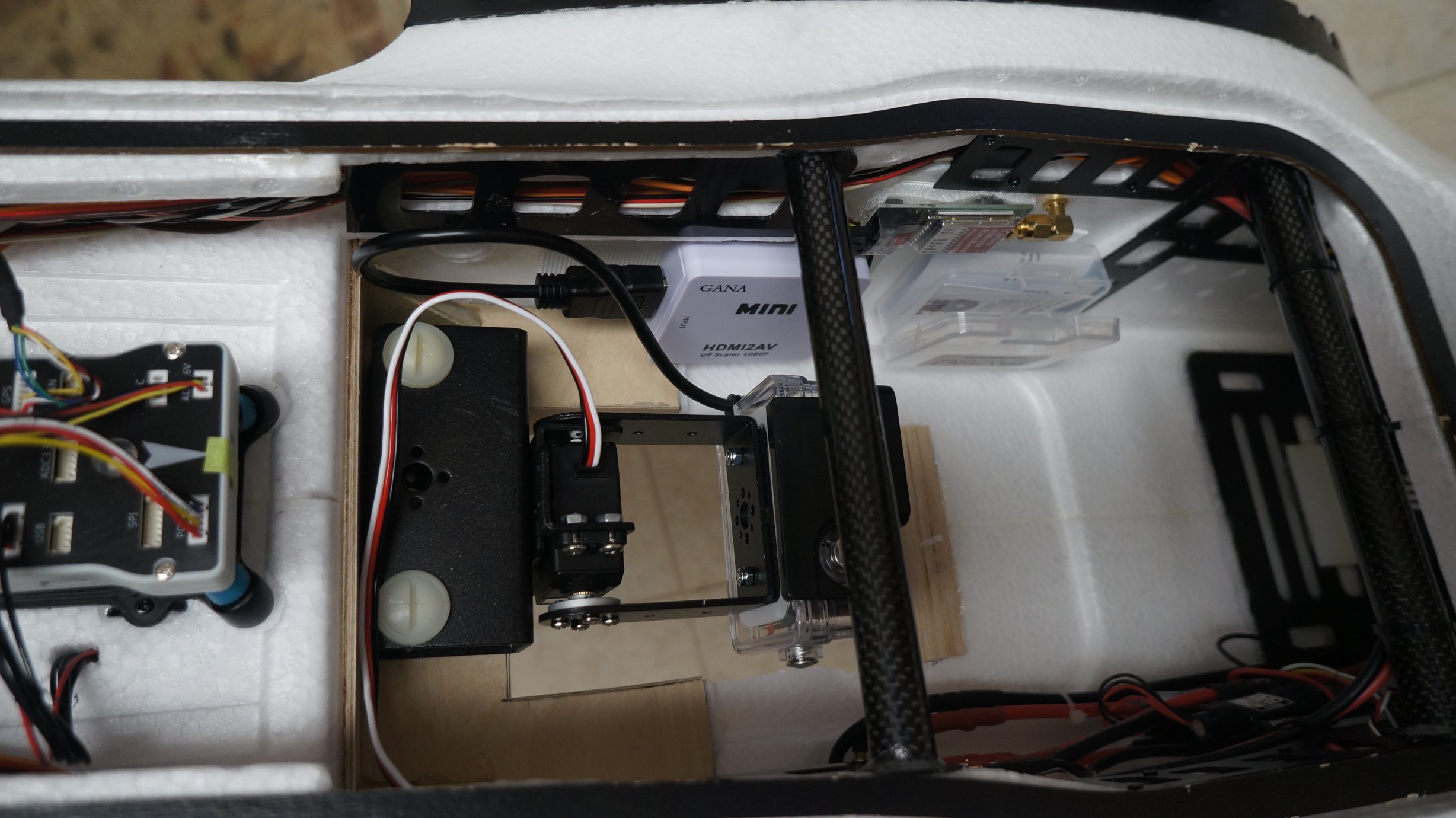
I found a good solution for mounting my pan/tilt gimbal. I was about to use some 1/4-20 bolts since all my nylon wing bolts were too short but I found some toilet seat screws in my plumbing supplies that were plenty long and much lighter. I only needed to drill out the larger holes in the PTZ bracket to a slightly larger 3/8" and then cut some holes in the fuselage bottom to recess the nuts. The foam is very thick on the fuselage bottom. The two nylon screws fit flush with the bottom of the fuselage and lock the gimbal solidly in place. All that is left is to cut my opening for the GoPro camera to swing down. The same opening should work for the Sony NEX camera when my foam block arrives.
Congratulations, Alfredo! I am glad that you discovered your issue.
If you bring the plane up higher away from the ground it will become more stable. When flying so low, the ground effect from air blowing all around makes it wobble a bit.
Cheers!
¡Felicidades Alfredo! Me alegra que hayas descubierto tu problema.
Si eleva el avión más lejos del suelo, se volverá más estable. Cuando vuela tan bajo, el efecto suelo del aire que sopla por todas partes hace que se tambalee un poco.
Si. Hoy voy a probar volar mas alto y cambiar a modo hover. Lo que noto despues de dos minutos de vuelo es que los moteres queman al tacto. Aca actualmente estamos en verano y hace 35 grados. Tengo miedo de que se estropeen con la temperatura
Thanks. Yes, I used Foam Tac to glue the wood to the foam. The 5-ply aircraft grade plywood is quite light so I may also shore up my opened window with a frame.
Two minutes is a long time to hover. You can be up in flying in less than one minute. It is 35 degrees here also, but Fahrenheit, not Celsius. I would rather be where you are!
Dos minutos es mucho tiempo para flotar. Puede volar en menos de un minuto. Aquí también hace 35 grados, pero Fahrenheit, no Celsius. ¡Preferiría estar donde estás!
Sigo avanzando con el proceso de ajuste. Pude calibrar los PID para lograr un vuelo libre de vibraciones. El modo hover mantiene la altitud. Pero estoy teniendo problemas en el control de posición modo lioter. El avión se desplaza con el viento y no mantiene la posición. Intenté aumentando las ganancias pero nada. Tendré algún problema con el GPS. Lo que noto que tengo 3dgps pero no 3dfix. Y me aparece un mensaje como que no puede establecer la Home posición. Tengo buenos valores de hdop 0.6 y 17 SAT. Se les ocurre alguna indicio de dónde puede venir el problema?
Gracias
That’s interesting. How much wind are we talking? Have you tried it on a calmer day? Have you tried facing the plane into the wind?
17 Satellites and an HDOP of 0.6 should be fine. If you could post a .BIN file, we can see if your quad ESC outputs from the flight controller are reaching a limit. More often than this is interference from the quad motors to the compass.
Eso es interesante. ¿Cuánto viento estamos hablando? ¿Lo has probado en un día más tranquilo? ¿Ha intentado hacer frente al avión contra el viento?
17 satélites y un HDOP de 0.6 deberían estar bien. Si pudieras publicar un archivo .BIN, podemos ver si tus salidas cuádruples ESC del controlador de vuelo están alcanzando un límite. Más a menudo que esto es la interferencia de los cuatro motores a la brújula.
Adjunto 2 archivos log de 2 vuelos en lo que no pude mantener la pocision. EL avion enfrentaba el viento y en modo loiter de desplazaba para atras. El viento era muy poco 5km/h .
Everything looked good and I do not see really bad movement in the image below. I noticed that you have two compasses enabled. Try selecting only the external compass and re-test to see if the movement becomes smaller.
Todo se veía bien y no veo un movimiento realmente malo en la imagen de abajo. Noté que tienes dos brújulas habilitadas. Intente seleccionar solo la brújula externa y vuelva a probar para ver si el movimiento se vuelve más pequeño.
Hola, por suerte todo va bien. Logre encontrar el problema del desplazamiento, era que tenia mal calibrado la posicion centrada del stick(en la calibracion de la radio no me tomo el centro del canal 2)
Solucionado eso el avion vuela muy bien en el modo loiter.
Creo que ya estoy en condiciones de probar la trancision. Pero cuando coloco el modo FBWA noto que el elevador se mueve algunos grados hacia abajo. con el avion nivelado en 0. No me pasa esto en los modos Qhover, en este ultimo el elevador queda igual que en el modo manual.
Ya me habia pasado esto en otro modelo que al final no lo pude soluciones y obvie volar en este modo(volaba en manual y sino directamente en Auto)
El tema que ahora la trancision la tengo que hacer de QHover a FBWA y si me mueve el elevador hacia abajo va a tender a caer donde acelere
I am glad you found the problem. For the FBWA mode, be sure that the SERVO_AUTO_TRIM function is set to 1. This will automatically level your plane in flight. No need to use the elevator trim manually.
Good luck!
Me alegro de que hayas encontrado el problema. Para el modo FBWA, asegúrese de que la función SERVO_AUTO_TRIM esté configurada en 1. Esto nivelará automáticamente su avión en vuelo. No es necesario utilizar el trim del elevador manualmente.
Todavía no pude probar el vuelo de ala fija por q no me ayuda las condiciones climáticas. Lo que estoy haciendo es colocando el sensor de velocidad aero. Le coloque un CUAV digital pero no sé si estará bien configurado por que me varía de 0 a 3 o 4 m/s estando adentro de mi casa. Le configure el ARSPD_TUBE_ORDER en 0 por q en 2 me variaba mucho. Esto es correcto?
It is recommended that you do not use the airspeed sensor on your initial flights. However, you can set it up for calibration while leaving it unused by the flight controller. The ARSPD_TUBE_ORDER is normally set to 2.
So, for the first flight, ARSPD_USE is set to 0 and ARSPD_AUTOCAL is set to 1. You can read more about it in the link below.
Se recomienda que no utilice el sensor de velocidad en sus vuelos iniciales. Sin embargo, puede configurarlo para la calibración sin que el controlador de vuelo lo utilice. ARSPD_TUBE_ORDER normalmente se establece en 2.
Entonces, para el primer vuelo, ARSPD_USE se establece en 0 y ARSPD_AUTOCAL se establece en 1. Puede leer más sobre esto en el enlace a continuación.
Hopefully, my third redesign is the charm. The pan didn’t work out due to the thickness of the fuselage foam so I simplified things by making a tilt-only gimbal for my GoPro H7 Black. This also had a benefit of reducing the gimbal weight from 345g to 255g. It was like adding my 114g camera weight for free!
The hole size in the fuselage bottom was also reduced. This will be a nice air exit to help keep the battery and forward flight components cool. The digital to analog conversion video downlink scheme is the same as my other fixed position gimbal using a modified $10 converter, ImmersionRC 600mw transmitter, and VAS Pagoda RHCP antenna. In the photos, you can see that I accidentally left my storage case open.
The top level idea here is to replace the finicky, expensive, brushless gimbals by using the Hypersmooth technology on the newer GoPro cameras.
First of all Happy New year Greg, hope you are fine during this hard times… I am glad that have made progress on this new plane. I have Just a simple question, what gimbal do you use and where you bought the gimbal ? Tks.