Okay, so I think I have my propulsion system ready.
I had to go a slightly different route since getting electronic parts from MFE wasn’t an option and a 12s power system would be best for this VTOL build. I made my motor selections guided by the stock MFE part specs and incorporating the sensor payload. I chose Tmotor parts as I am familiar with them and the quality is generally top notch.
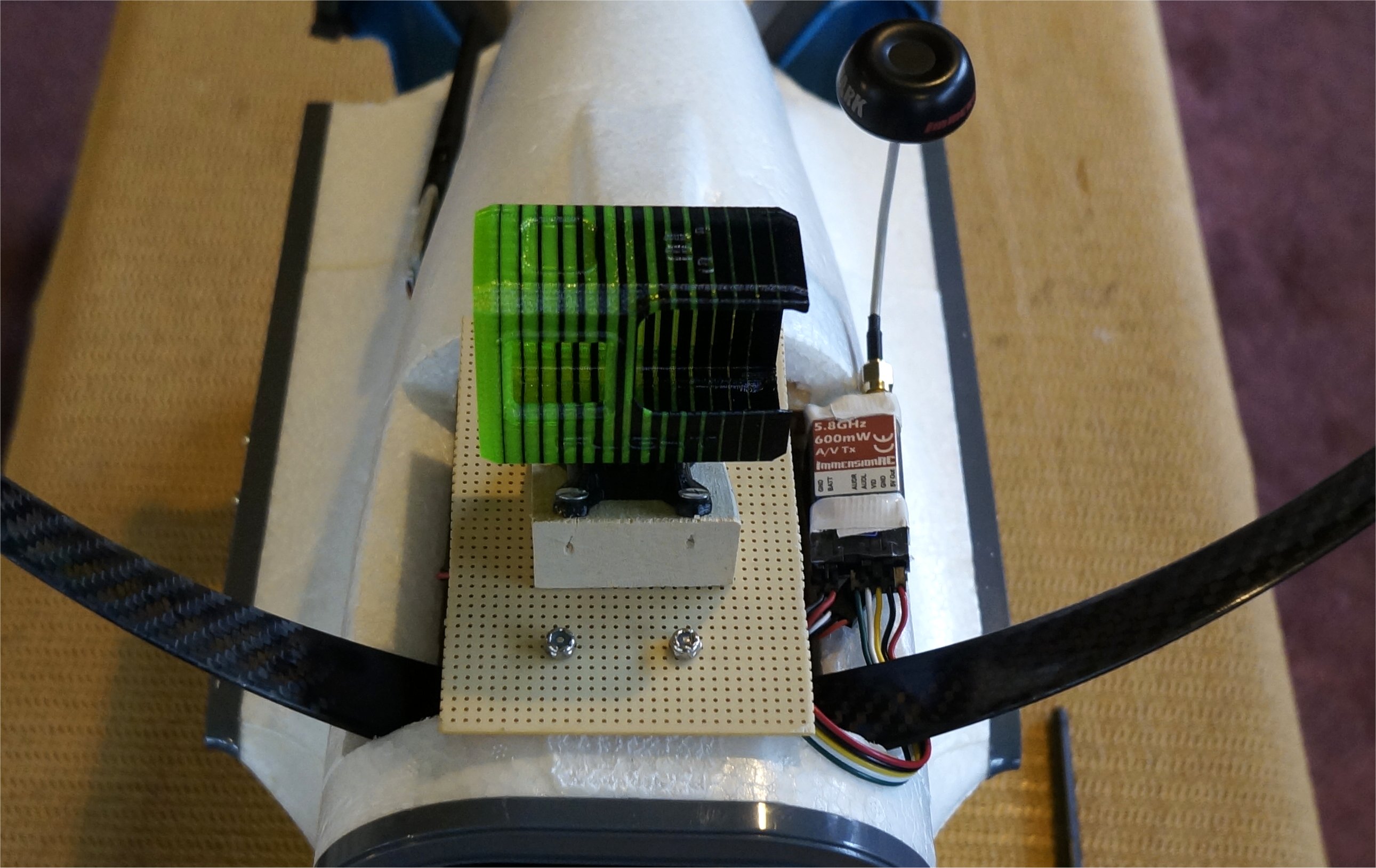
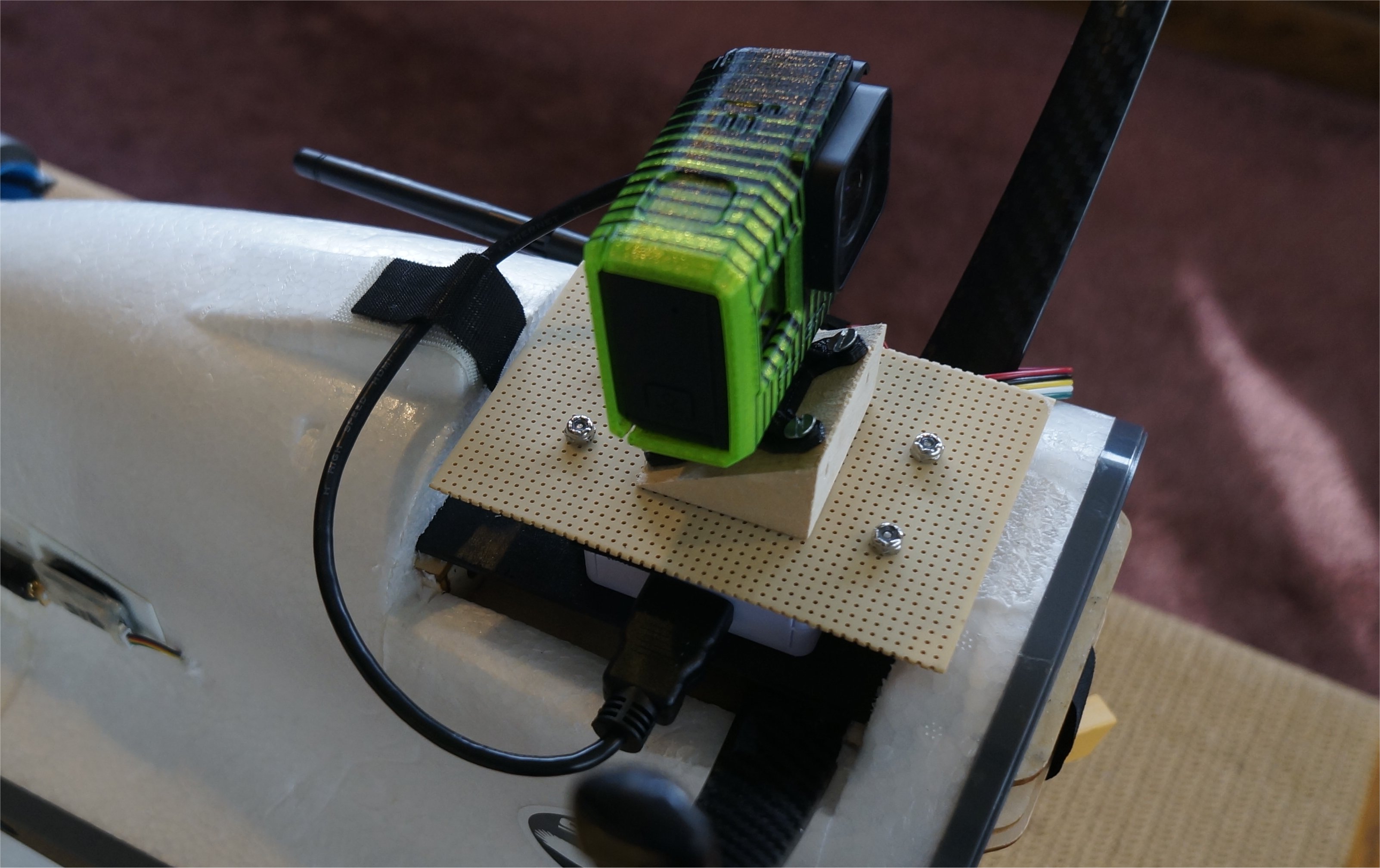
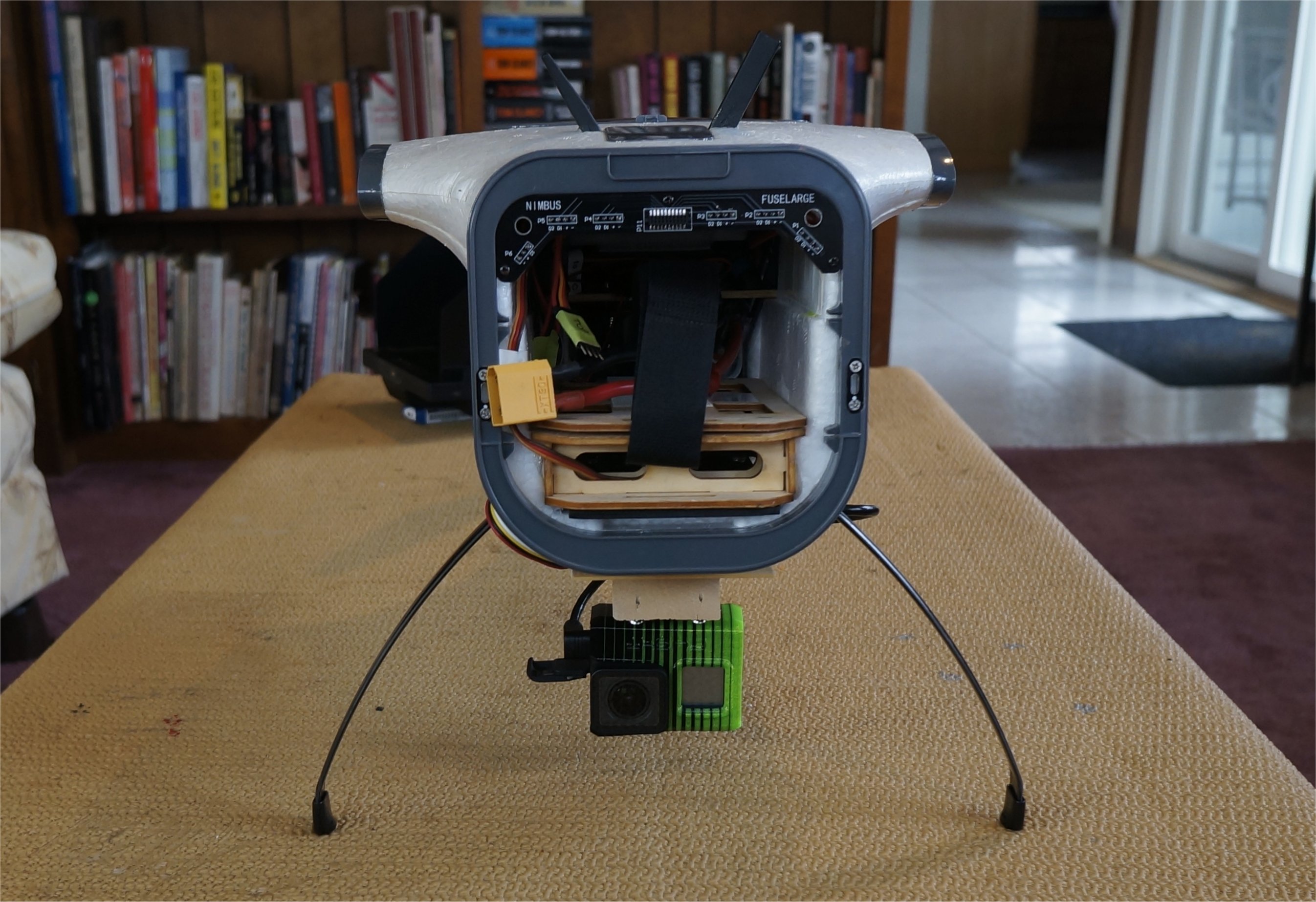
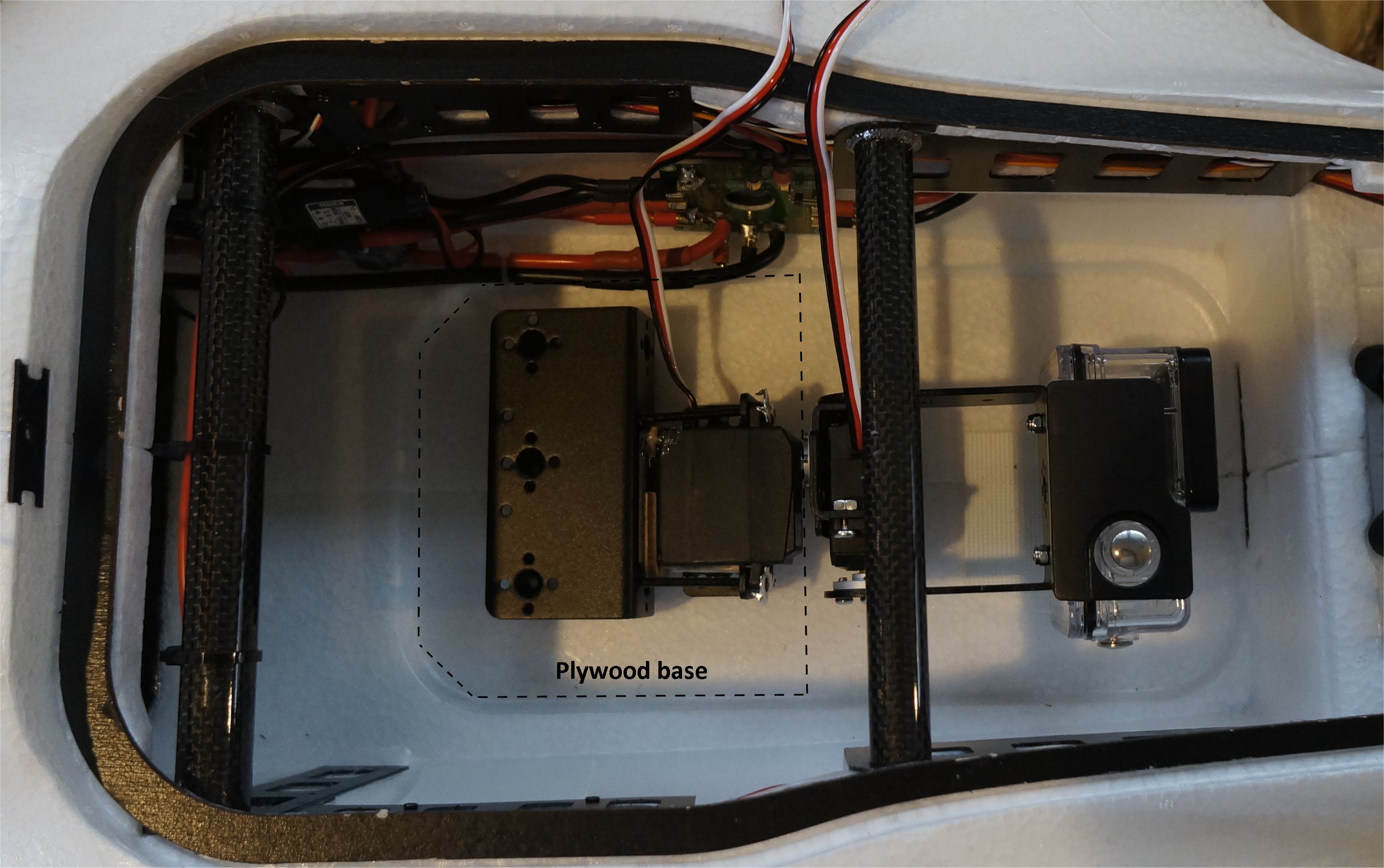
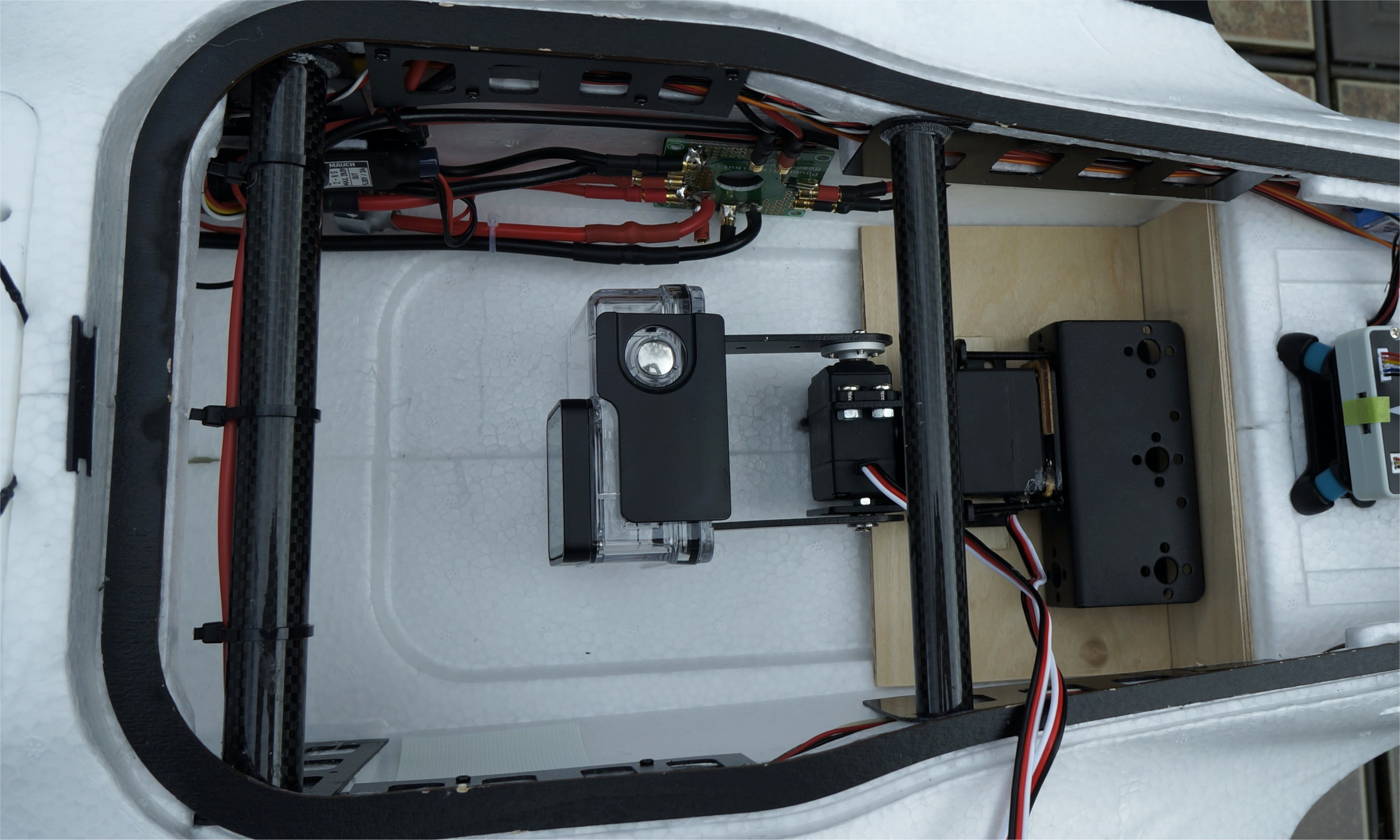
Main Sensor: The sensor payload (magnetometer) finally arrived which meant I could test fit components internally (see photo) and get an accurate, final weight of complete sensor (2040g). Original manufacturer spec was less than 1kg, however it was advisable to extend the cable in order to help mitigate any magnetic noise from the VTOL itself. I plan to attach the sensor box under the carbon wing spars and then also suspend the sensor cable from the spars near C.G. routing it through the belly. There will be approx 1.5kg of hanging mass so I want to secure it to the strongest part of the airframe.
VTOL motors: the MN601-S KV170 (https://store-en.tmotor.com/goods.php?id=457) are very close in spec to the stock MFE 5515KV170 (https://www.aliexpress.com/item/10000248221605.html) with slightly more thrust available (6.6kg vs. 6kg max with 21x6.3 prop) for slightly more current (21A max vs. 24.7A), lower internal resistance (115mOhms vs. 142mOhms), and 40g more weight. One issue I discovered is that the MFE motor mounts can only accommodate up to 60mm diameter flush-mounted motor due to the spacing of the mount holes and the tube clamp (MN601-S is 68.8mm diameter). I looked at modifying the mount, though I feel it would compromise the integrity since the motor mounting holes are reinforced and so you’d have to cut away at the tube clamp side. One slight modification (I don’t prefer) would be to add a spacer between the motor and the mount so the motor sits higher and clears the tube clamp. Fortunately, Tmotor offers this motor in an integrated kit which includes the mount, motor, and ESC. It is more expensive as you’re paying for simplicity (https://store-en.tmotor.com/goods.php?id=799).
Cruise motor: this one was a bit more tricky to match since for some reason MFE chose a 5015-KV210 (https://www.aliexpress.com/item/10000248218790.html) which has a large width stator, high torque, and low kV similar to the VTOL motors. The fixed wing cruise motors I’ve been researching are typically smaller width stators, high RPM, and lower thrust (any insight into why MFE chose a high torque motor on the Fighter for cruising is appreciated ). The opening in the nose cone of the Fighter has a diameter of 67mm. This meant, unfortunately, that the MN601S would not fit (68.8mm diameter) even though its specs were close to that of the stock MFE cruise motor aside from the RPM difference. Not to mention that it would need even more clearance if one did “open the cone” more since it is an outrunner motor. Would have been nice to have swap-able spares if all motors were the same.
That being said, I did find the option of the Tmotor AT4120 KV250 (https://store-en.tmotor.com/goods.php?id=826) which is a significantly more powerful motor than stock MFE (though 84g heavier), has half the internal resistance (76mOhms vs.147mOhms), and it is also 50 mm in diameter which fits in the nose cone hole. The bench test results posted on the AT4120 with a 16x8 prop show that 80% throttle produced 5kg of thrust at 24A (stock MFE has max thrust of 4.8kg at 43A). Max thrust of the AT4120 is 6.7kg at 46A, not that you’d want to be cruising at that high of throttle. There are other AT models with more thrust at higher Amps and bump up 50g in weight at each level up.
I plan to pair this cruise motor with an Alpha 60A HV ESC since that is what the VTOL motor kits will have and the AT4120 max current is 45A which means it follows the 75% rule of thumb for the ESC capacity.
Battery: MFE recommends 12s 16000mAh LiPo battery which can be achieved by using two 6s 16000mAh batteries in series (double voltage, same amperage). To keep it simple I’ll likely go with two 6s in series, however, I am considering using a double battery setup. In the double battery setup one battery has a higher discharge rating (30C) and is dedicated to the VTOL motors and the second battery with a low discharge rating (12C or 15C) and high capacity is used for cruise motor and all other electronics on board. The benefit of this system is that 1) you always know you have enough juice to land in hover mode and 2) you don’t risk uneccesary voltage sag on say a 12C high-capacity battery which could result in damaged cells, shortened battery life or worse, a crash. Appreciate any input on this arrangement.
RTF weight estimate: Using info from Greg’s hover test flights back in November, I adjusted for the differences in weight for my choice of motors, ESCs, battery, and payload. My all up weight (AUW) is 11.3kg (hypothetically powered by 2 Turnigy 6s, 16000mAh 12C LiPo’s) which is close to the max weight of 11.5kg listed by MFE for the Fighter VTOL. I think I’ll be okay here.
Quick Calculations: In hover mode, Greg estimated 15A per ESC (60A total) for his 7.45kg AUW. According to the MFE spec sheet, the 5515KV170 would generate 2kg thrust at 3.9A per motor (8kg thrust at 15.6A total) to lift Greg’s frame. If I needed 12kg of thrust to hover, the 5515KV170 would use close to 8A per motor (32A total) with an efficiency of 8g/W. The Tmotor MN601-S would use 7.5A per motor (30A total) with 8.5g/W efficiency so probably a wash with the exception that Tmotor has 10% more max thrust. Looks good here.
My top unknown currently is if the Fighter will be happy with a 1.5kg sling extending 5m below the plane using the Tmotor AT4120 KV250? AUW seems to be within MFE Fighter spec so really it will be the air drag force created by the sling that needs to be overcome. I have a little wiggle room if I need to step up the cruise motor one level or two.
Thoughts, suggestions, general comments?
Cheers,
Christian